一种被抛投物自正位方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及物体正位技术领域,特别涉及一种被抛投物自正位方法。
背景技术
在众多场景中,需要对一目标地理范围进行物体抛投,然后被抛投物体再继续完成自己的工作。例如:用于外星登陆的登陆车等登陆装置,野外抛投电子通信信标用于与卫星(例如GNSS监测终端)、无人机、搜救飞行器、雷达和中继通信塔等实现电子通信,野外环境监测的倾角传感器和雨量传感器,被抛投物自身具有光学识别件来实现上空识别等等。以上种种情况下的被抛投物有一个共性就是其自身可以作为一个通信信号源需要与外部实现通信,在通信中为了保证通信的有效性和质量,那么就需要被抛投物在着陆后实现特定方位的正位。除此以外,例如野外环境监测的倾角传感器等地质传感器,也需要自身正位来作为仪器工作的基准。因此在被抛投物上提供自正位技术是十分必要的。
发明内容
有鉴于上述情况,本发明的提供一种被抛投物自正位方法,满足更好的使用效果,方案如下:
一种被抛投物自正位方法,其特征在于包括如下步骤:
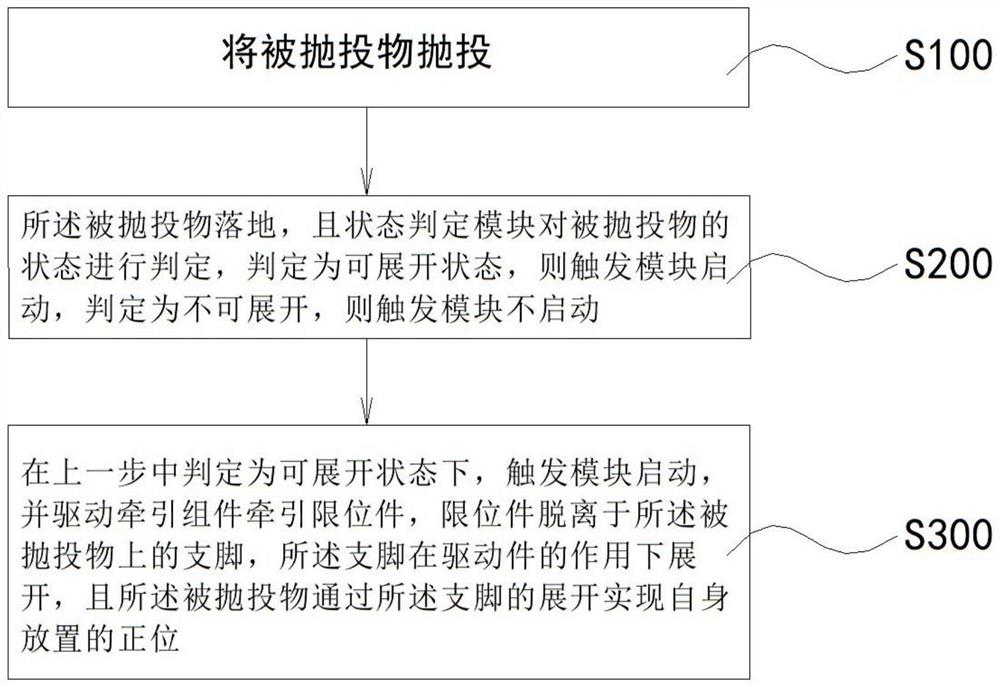
S100.将被抛投物抛投;
S200.所述被抛投物落地,且状态判定模块对被抛投物的状态进行判定,判定为可展开状态,则触发模块启动,判定为不可展开,则触发模块不启动;
S300.在上一步中判定为可展开状态下,触发模块启动,并驱动牵引组件牵引限位件,限位件脱离于所述被抛投物上的支脚,所述支脚在驱动件的作用下展开,且所述被抛投物通过所述支脚的展开实现自身放置的正位。
进一步,所述状态判定模块包括主控模块,还包括定位模块、通信模块、角速度计、加速度仪、计时器、温度计、气压计、录音器、相机和无线电信标中的一种或多种。
进一步,所述步骤S200中,所述状态判定模块包括提供被抛投物静止位置的定位信息的定位模块和将定位信息远程通信至外部的通信模块,且包括如下判定步骤:
S210.所述定位模块将所述被抛投物静止后的定位信息通过所述通信模块远程发送到控制端;
S220.所述控制端依据获取的定位信息进行人工判定;
S230.人工判定为可展开状态,再将展开指令通信至所述通信模块,所述通信模块获取展开指令后再发送至触发模块;
S240.所述触发模块启动。
进一步,所述步骤S200中,所述状态判定模块包括提供被抛投物角速度的角速度计,且包括如下判定步骤:
S210.所述被抛投物从被抛投到落地静止过程中,角速度计产生变化的角速度信号;
S220.根据角速度的变化进行判定,且达到触发的标准;
S230.所述触发模块启动。
进一步,所述步骤S200中,所述状态判定模块包括提供被抛投物加速度的加速度仪,且包括如下判定步骤:
S210.所述被抛投物从被抛投到落地静止过程中,加速度计产生变化的重力加速度信号;
S220.根据重力加速度的变化进行判定,且达到触发的标准;
S230.所述触发模块启动。
进一步,所述判定模块中包括实现延时功能的计时模块,在所述步骤S100中,抛投时启动所述计时模块,在步骤S200中,所述判定模块依据计时模块设定的延时判定为可展开状态,然后再使得触发模块启动。
进一步,所述触发模块包括行程开关,且所述步骤S300中还包括如下子步骤:
S310.所述触发模块获取启动信号,且所述行程开关发生机械动作;
S320.连接于所述行程开关的牵引组件在上一步中的机械动作牵引下产生位移;
S330.牵引组件位移带动限位件产生位移,限位件的位移使得被限位于所述限位件的支脚脱离;
S340.所述驱动件驱动所述支脚展开。
进一步,所述被抛投物为倾角传感器。
有益效果:本发明构思新颖、设计合理,且便于使用,本发明基于现实中需要被抛投的物体,提供了一种在被抛投后,基于机械结构和电控方式的自动正位的方法,便于被抛投物的后续工作能有效展开。
附图说明
图1是本发明对应一被抛投物的支脚收拢状态下的结构示意图。
图2是本发明对应一被抛投物的支脚展开状态下的结构示意图。
图3是本发明对应一被抛投物的剖视结构示意图。
图4是本发明对应一被抛投物的分解结构示意图。
图5是本发明步骤框图。
图6是本发明步骤S200一子步骤的实施例框图。
图7是本发明中判定和触发对应硬件连接的一实施例结构示意图。
图8是本发明步骤S200一子步骤的实施例框图。
图9是本发明中判定和触发对应硬件连接的一实施例结构示意图。
图10是本发明步骤S200一子步骤的实施例框图。
图11是本发明中判定和触发对应硬件连接的一实施例结构示意图。
图12是本发明中判定和触发对应硬件连接的一实施例结构示意图。
图13是本发明步骤S300一子步骤的实施例框图。
具体实施方式
下面结合附图和实施例对本发明作在具体实施过程中,作为进一步优选说明:
实施例一
请参考图1-4,一种具有正位功能的被抛投物,具有被抛投物主体100和若干用于支撑被抛投物主体100进而实现正位的支脚200,支脚200可转动连接于被抛投物主体100,支脚200和被抛投物主体100之间设置有弹簧300(属于驱动件)以通过弹力使支脚200展开,且支脚200通过弹簧300展开后实现支撑于地面以对被抛投物主体100正位;被抛投物主体100上设置有限位件400,限位件400通过限位支脚200来使支脚200收拢于被抛投物主体100的外周,且限位件400连接有行程开关(包括于触发模块)以使限位件400实现往复运动,进而限位或脱离于支脚200。
本装置的基本原理是:被抛投物主体100为抛投动作中,实现后续工作的硬件主体。该硬件主体根据不同的使用背景,搭载不同的功能模块和附属物,例如卫星信标中搭载信号发生器,摄像头,录音器;物资空投中搭载荧光板或反光片等,火场投放中搭载温度传感器等。不限于以上所具体举例,一切依据使用的场景及技术设定和条件。由于被抛投物主体100仅仅依靠自身难以实现目标方位的正位,因此通过设置支脚200来帮助其正位。具体是通过弹簧300来驱动支脚200展开,实现正位。基于此,在正位动作发生以前,支脚200是需要收拢并稳定的,因此通过设置限位件400来对收拢的支脚进行结构稳定。在支脚200收拢到背抛投物主体100的外周时,限位件400作用力到支脚200上,使其实现收拢状态的稳定。限位件400机械动作为往复运动,因此通过连接到行程开关来实现其往复运动,如此,通过控制行程开关即可实现限位件400相对支脚200的限位和打开操作,实现将支脚200稳定地固定或者释放。采用行程开关还可以帮助实现动作的电控,进而可以接入各种触发行程开关的信号系统和控制系统。
进一步,若干支脚200沿着被抛投物主体100的外周设置,且相邻两个支脚200的周向间距相同或不相同,相邻两个支脚200的轴向间距相同或不相同。
在本优选中,通过限制各相邻支脚200轴向的间距和竖向的间距,来实现在被抛投物主体100被正位后具体的角度朝向。该方案的原理是,利用支脚200的位置和高度差异来实现被抛投物主体100的正位后的朝向;例如,若干支脚200长度均相同,且相邻两个支脚200周向间距相同,轴向间距为0,假如落地为一平面,则最后的朝向一定是竖直朝上的。在另外一些情况下,假如需要被抛投物主体100不竖直朝上,而是以一定角度倾斜朝向,则可以通过上述设置相邻两个支脚200的间距来实现,并且间距不同,则角度不同,可操作范围大。基于同样的思路,理论上还可以通过采用不同实际行程的弹簧来作为弹簧300来达到这个目的。
进一步,支脚200与被抛投物主体100之间可转动连接的连接处靠近被抛投物主体100的底部,且支脚200通过弹簧300的弹力作用向被抛投物主体100的底部方向展开。
在本优选中,限定了支脚200的展开方向,即限定了在正位后,被抛投物主体100的底部是面向地面的。
进一步,被抛投物主体100内设置有配重物,且该配重物靠近被抛投物主体100的底部。
本优选中,配重物的设置保证了落地一端为底部,便于启动支脚200。
在具体实施时,为了避免意外打开,可以在支脚200外设置一保护圈,将所有支脚200束缚起来,在使用前去除该保护圈。
实施例二
在实施例一的基础上,如图1-4所示,以一种倾角传感器作为被抛投物给出具体的装置及其结构。被抛投物主体100包括壳体110,支脚200可转动连接于壳体110,且弹簧300也设置于壳体110和支脚200之间;行程开关160设置于壳体110的内部,且限位件400的一头位于壳体110的内部,并连接到行程开关160,另一头位于壳体110的外部,并用于对支脚200限位。进一步,沿被抛投物主体100的底部到顶部方向,壳体110包括底壳板111、中壳座112、中筒壳113和顶壳帽114,中壳座112连接于中筒壳113底部,并封闭中筒壳113的底端,中壳座112的底端面设置有耳板以可转动连接到支脚200,底壳板111位于中壳座112的下方,且支脚200可转动连接于中壳座112的连接处位于中壳座112和底壳板111之间,顶壳帽114连接于中筒壳113的顶部。进一步,被抛投物主体100还包括内支撑件120,且该内支撑件120的一头从中筒壳113的上端伸入其内部,顶壳帽114封盖内支撑件120的另一头;内支撑件120中空,且内支撑件120内固定并竖直设置有固定轴121,该固定轴121上滑动设置有滑套122;限位件400依次穿过顶壳帽114和内支撑件120,并伸入到内支撑件120中空的内部,且限位件400的内端连接到滑套122;行程开关160设置于中筒壳113内,行程开关160上实现往复运动的推杆通过刚性的连接件连接到滑套122以驱动滑套122沿着固定轴121滑动,推杆上连接有用于使其运动复位的归位弹簧180。进一步,被抛投物主体100还包括电池组130,且该电池组130位于中筒壳113内,电池组130靠近中筒壳113的底端以起到配重的效果。进一步,被抛投物主体100还包括底部垫板140和电路板150,底部垫板140位于中筒壳113内,并位于电池组130的下方,电路板150位于电池组130的上方,并贴合到内支撑件120的底端面。
如图1-4所示,本实施例给出了一种具体作为倾角传感器的结构和设置形式。作为地理监测手段,倾角传感器的野外投放,可以起到监测例如山体滑坡等情况的作用,同样作为地理监测传感器的还有雨量传感器等。
本实施例中的方案在具体实施时的原理及使用过程如下:
支脚200采用条形的结构,可以采用采用刚性较强的金属材料制成。如图2所示,本实施例中,支脚200的数量为八个,但是产品的实际设计和制造不限于八个支脚200,可以为十二个和十六个等。弹簧300采用的是扭簧,也可以采用拉簧或者压簧,由于拉簧和压簧与扭簧的工作原理不用,弹力作用方向不同,因此如果采用拉簧或者压簧,则需要设置具体的,适宜的设置结构形式。基于本实施例中,采用扭簧,因此在中壳座112上设置耳板和挡板来形成槽状结构,以便于容纳设置扭簧。支脚200和限位件400数量相同,且位置一一对应,在支脚200收拢的状态下,支脚200压迫住扭簧,且悬置端通过限位件400卡住实现限位。限位件400为一刚性金属构件,如图所示,在本实施例中设置为细条状。用于卡住限位件400的一端为勾状,通过勾住支脚200的上端来实现收拢和固定。限位件400扣住支脚200的作用力来自于行程开关160。行程开关160按照提前设定好的触发方式被触发,通过推杆161的引动连接件170来牵引滑套122,进而带动连接到滑套122上的限位件400实现对支脚200的脱离。基于反复动作的需要,在行程开关160处设置有归位弹簧180来帮助推杆161的动作复位。如图3和4所示,本实施例中连接件170为一刚性的拉丝,且与推杆161为可转动的活动连接,以便于扩大其活动范围。同样,限位件400与滑套122处也是采用可转动的活动连接,便于扩大其活动范围。在上述扩大的活动范围情况下,给相应的部件和结构在受到冲击的情况下,能保证其结构的整体更具有韧性,而不是受到冲击就破坏掉的脆性。连接件170余滑套122的连接也为轴向可活动的连接形式,同样可以起到化解冲击力的效果。
壳体110由底壳体111、中壳座112、中筒壳113和顶壳帽114四部分组成,且如图2和3所示,支脚200的可转动端设置于底壳体111和中壳座112之间。通过电池组130实现配重,且配重到整体的底部位置。当整体下落时,受配重影响,是底壳体111触地,然后再弹跳一次,容易侧倒,如此,为非正位状态。触发行程开关160,限位件400与支脚200脱离。支脚200在扭簧自身强大的弹力作用下,展开各个支脚200。基于扭簧设置产生的空间范围,支脚200展开,又铺平,实现正位。为了提高支脚200展开和正位状态下的抓地能力,在各个支脚200上设置有定位锥210。
本实施例中,行程开关160采用直线式行程开关,具有一实现直线往复运动的推杆161。通过推杆161实现一单向的运动来触发限位件400,不论推杆161在形成开关160触发下是推还是拉,为了帮助推杆161复位,配套设置有归位弹簧180。如图3所示,归位弹簧180为一锥簧,且一般基于电磁铁的原理的行程开关会设置有一帮助推杆复位的弹簧。如图3所提供的具体结构设置为为例,行程开关160的推杆161往整个装置底部移动作为触发的动作形式,在推杆往装置底部方向移动时,牵引连接件170,进而拖动滑套122也向装置底部方向移动,基于滑套122和限位件400的设置结构(限位件400形成一杠杆,支点在内支撑件120上用于限位件400穿过的孔的位置),如此则使得限位件400外端(朝向装置底部方向的勾状设置)脱离于支脚200。如此,为了保证限位件400在非触动引发的状态下能稳定地对支脚200限位,通过设置限位弹簧(图中未画出)来为限位件400提供限位状态的作用力,具体是限位弹簧为一拉簧,且一端连接到滑套122上,另一端连接到内支撑件120的顶部,通过限位弹簧的拉力作用在形成为杠杆的限位件400上,进而限位件400的外端向装置底部方向勾住支脚200,形成有力地限位。从对滑套122的作用方向的角度来对比,行程开关160和限位弹簧互为对手方,且实际行程开关160作用的力度远大于限位弹簧的作用力度,如此才能保证行程开关160作为触发动作的发力方而有效。限位弹簧的设置,在相对较小的力度下能起到有效的作用,还要配合于勾状的限位结构,和将限位件设置为杠杆。以上以一种具体的结构形式为例说明,在具体实施时基于同样的原理,还可以有其他的形式,例如限位件400外端的勾状限位结构朝上,那么内部关于作用到滑套122的功能性装置及其发力,只要反向设置即可。限位弹簧在上述具体的结构形式中,采用为拉簧,基于滑套122需要通过向顶部方向移动实现作用,那么基于弹力特性,在相反的方向设置压簧也可,此为弹簧的应用技术,为惯用技术手段,在此不做赘述。需要说明的是,采用各种不同的弹簧,并基于所采用弹簧特性的设置,均因视为本方案的相同。
在具体实施时,为了给装置内部的电路供电,因此设置在顶壳帽114上设置有太阳能电板190。
以上,行程开关160作为触发模块的一部分,推杆161、连接件170、滑套122和固定轴121作为牵引组件的一部分。
实施例三
基于以上实施例,并结合电控部分的配置,如图5所示,给出具体的自正位方法,如下步骤:
S100.将被抛投物抛投;
S200.被抛投物落地,且状态判定模块对被抛投物的状态进行判定,判定为可展开状态,则触发模块启动,判定为不可展开,则触发模块不启动;
S300.在上一步中判定为可展开状态下,触发模块启动,并驱动牵引组件牵引限位件,限位件脱离于被抛投物上的支脚,支脚在驱动件的作用下展开,且被抛投物通过支脚的展开实现自身放置的正位。
在电控配置中,状态判定模块包括主控模块,还可以包括定位模块、通信模块、角速度计、加速度仪、计时器、温度计、气压计、录音器、相机和无线电信标中的一种或多种。
例如,如图6和7所示,状态判定模块包括主控模块,提供被抛投物静止位置的定位信息的定位模块和将定位信息远程通信至外部的通信模块,则在S200中的判定步骤如下:
S210.定位模块将被抛投物静止后的定位信息通过通信模块远程发送到控制端;
S220.控制端依据获取的定位信息进行人工判定;
S230.人工判定为可展开状态,再将展开指令通信至通信模块,通信模块获取展开指令后再发送至触发模块;
S240.所述触发模块启动。
该种判定方式中,基于相应的电子信息方案支持,具体地,定位模块连接到主控模块,主控模块再连接到通信模块和触发模块。完成通信后,启动的信号传输给主控模块,再发送给触发模块。定位模块用于提供具体的位置信息,常见的可以采用基于卫星定位的经纬度定位模块,例如GPS模块。然而,地理定位在现有技术中有多种技术手段,除了卫星定位以外,还有例如雷达定位,那么定位模块则为雷达信标,同样的原理,如果采用其他地理上的无线电定位方式,则可以设置其他无线电信标。在一些方式中,还可以通过载入地图矢量量数据来实现定位。地理定位作为本方案中直接引用的技术手段,不做具体的技术说明,所列意在主张本技术方案的范围。
又,如图8和9所示,状态判定模块包括提供被抛投物角速度的角速度计,则在S200中的判定步骤如下:
S210.所述被抛投物从被抛投到落地静止过程中,角速度计产生变化的角速度信号;
S220.根据角速度的变化进行判定,且达到触发的标准;
S230.所述触发模块启动。
该种判定方式中,以角速度计作为判定的基础信息,尤其是被抛投物需要实现导航功能时,角速度计往往作为必不可少的装置,那么产生的角速度信号就十分合理地作为判定依据。角速度计的基本原理来自于陀螺仪,基于其在抛投到静止过程中的变化,作为判定能否展开支脚的依据。具体是角速度计连接到主控模块,主控模块再连接到触发模块。
又,如图10和11所示,状态判定模块包括提供被抛投物加速度的加速度仪,则在步骤S200中的判定步骤如下:
S210.所述被抛投物从被抛投到落地静止过程中,加速度计产生变化的重力加速度信号;
S220.根据重力加速度的变化进行判定,且达到触发的标准;
S230.所述触发模块启动。
该种判定方式中,通过加速度计的信号变化来作为判定的基础信息。相应的电路连接为加速度计连接到主控模块,主控模块连接到触发模块。主控模块通过接收加速度计的信号变化来产生触发指令,并发送给触发模块进行触发。
又,如图12所示,判定模块中包括计时模块,计时模块通过延时设定来作为判定的信息基础。在这种方式中,需要在抛投时开始倒计时,计时模块连接到主控模块,当计时到达时,主控模块发送一触发指令到触发模块。
以上所列四种判定方式在实际情况下,不限于单独使用,也可以复合使用,一切依据所配置的电子硬件条件,及设计的判定思路。
除了以上所列的四种具体的判定方式,还可以根据所抛投位置的地理条件等环境因素,以及被抛投物上的硬件设置,例如通过温度计、气压计、录音器、相机、无线电信标和雷达信标等作为判定的信号基础,然后依据获取的基础信号通过主控器进行逻辑判定,符合提前设定的触发条件均可实现触发控制。
以上相关的电子信息装置的设置中还会涉及到一些常见的功能模块,为惯用技术,例如数模转换电路和放大电路等,在此不一一列出。
基于实施例一和实施例二中所提供的具体硬件结构,如图13所示,以行程开关为触发模块中的一部分。则,步骤S300包括如下子步骤:
S310.所述触发模块获取启动信号,且所述行程开关发生机械动作;
S320.连接于所述行程开关的牵引组件在上一步中的机械动作牵引下产生位移;
S330.牵引组件位移带动限位件产生位移,限位件的位移使得被限位于所述限位件的支脚脱离;
S340.所述驱动件驱动所述支脚展开。
行程开关的工作需要自身配套的控制电路,该配套电路电性连接到主控模块,为现有技术,在此不做赘述。
继续结合实施例二中的硬件基础,由于在支脚200上设置了定位锥210,因此在步骤S300中还以可以涉及定位锥210钉入底面这一步骤过程。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 一种被抛投物自正位方法
- 一种具有自正位功能的被抛投物