一种可穿戴式串并联外骨骼机械臂及其运作方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及一种人体上肢康复器械,尤其是涉及一种可穿戴式串并联外骨骼机械臂及其运作方法。
背景技术
目前的串并联的外骨骼机械臂大多采用液压与气动装置,比如专利号为CN200410025779.9的“一种可穿戴式的柔性外骨骼机械手”所公开的机械臂,虽然具有很好的韧性和仿生学特点,但是不能实现精确控制,断电后位姿不能自动保持,在此基础上,专利号为CN200910175541.7的专利公开了一种“用于辅助附肢运动的佩戴装置”,虽然提高了定位准确性,但是应用以及操作范围十分有限,不能满足实际要求。
发明内容
发明目的:针对上述问题,本发明的目的是提供一种适合于人体上肢康复的可穿戴式串并联外骨骼机械臂,扩大操作范围,提高精准度。并公开了其运作方法。
技术方案:一种可穿戴式串并联外骨骼机械臂,包括依次间隔同轴排列的关节环一、关节环二、关节环三、关节环四以及伸缩装置、转动关节、移动部件、控制系统,伸缩装置设有多个,在关节环一与关节环二之间以及关节环二与关节环三之间均有设置,关节环一与关节环二之间设有四个呈周向间隔分布的伸缩装置,其中每个伸缩装置的两端分别与关节环一、关节环二铰接,关节环二与关节环三之间设有两个伸缩装置以及一个转动关节,三者的两端分别与关节环二、关节环三铰接,关节环三与关节环四之间设有多个移动部件,每个移动部件的一端分别与关节环三活动连接,另一端与关节环四铰接,伸缩装置、转动关节、移动部件分别与控制系统连接。
进一步的,伸缩装置包括外壳、内壳、丝杠、螺母、伺服电机,内壳置于外壳内部,外壳和内壳均为筒状结构且外壳的内径大于内壳的外径,丝杠置于内壳中,伺服电机在外壳的一端安装于其内部并与丝杠的一端连接,内壳靠近伺服电机一端的内部安装有螺母,螺母与丝杠配合连接构成丝杠副,内壳设有螺母的一端的外周面上均布两个凸台,外壳另一端的内部周向分布了两个与凸台横截面相同大小的缺口,在丝杠副工作时,凸台与缺口配合限位,伺服电机与控制系统连接。
最佳的,设置于关节环一与关节环二之间的伸缩装置的一端通过球铰一与关节环一的一端面铰接,另一端通过球铰二与关节环二的一端面铰接;设置于关节环二与关节环三之间的伸缩装置的一端通过球铰三与关节环二的另一端面铰接,另一端通过球铰四与关节环三的一端面铰接。
进一步的,转动关节包括外转动件、内转动件、舵机,外转动件一端通过虎克铰一与关节环二的另一端面铰接,舵机安装于外转动件另一端外周上对应缺口处并与内转动件一端连接,内转动件另一端通过虎克铰二与关节环三的一端面铰接,舵机与控制系统连接。
进一步的,移动部件包括滑块、转绞一、刚性杆件、小电机、小齿轮、转绞二,关节环三的另一端面上安装有环形齿轮,滑块上的缺口内安装有小齿轮,小齿轮与环形齿轮啮合使滑块与环形齿轮连接,小电机安装于滑块上并与小齿轮连接,刚性杆件的一端通过转绞一与滑块连接,另一端通过转绞二与关节环四铰接,小电机与控制系统连接。
最佳的,关节环四环内安装有可供穿戴者握持的手柄。
进一步的,控制系统包括微控制单元以及分别与其信号连接的力测量单元、位移测量单元、角度测量单元,每个伸缩装置上分别安装有一个力测量单元和一个位移测量单元,每个移动部件上分别安装有一个力测量单元和一个角度测量单元,转动关节上安装有一个力测量单元和一个角度测量单元,微控制单元安装于本机械臂上,伸缩装置、转动关节、移动部件分别与微控制单元连接。
最佳的,力测量单元为负荷传感器,位移测量单元、角度测量单元均为电位计,微控制单元为单片机。
最佳的,控制系统还包括训练软件模块、便携式控制单元,便携式控制单元设有控制界面,便携式控制单元与微控制单元连接,训练软件模块为微控制单元里的一个软件模块。
一种上述的可穿戴式串并联外骨骼机械臂的运作方法,其特征在于包括以下步骤:
步骤一:操作者将手臂从关节环一伸入串并联外骨骼机械臂的内部,并将其穿着于手臂外,根据操作者的体型和手臂长度的差异,中国控制系统调节伸缩装置的初始长度进行适配,调节完成后,将其固定在操作者的手臂上,操作者用手握住最前端关节环四;
步骤二:通过控制系统控制伸缩装置、移动部件和转动关节的运动使得串并联外骨骼机械臂完成所需的相应动作;
具体来说,肩部关节的三个自由度的运动由肩部4SPS并联机构单独控制,通过微控制单元控制肩部关节的四个伸缩装置长度差异变化,可实现上肢肩关节的前屈或后伸、内收或外展、旋内或旋外。给关节环一与关节环二之间设置的四个伸缩装置编号为伸缩装置一、伸缩装置二、伸缩装置三、伸缩装置四,通过微控制单元控制伸缩装置二和伸缩装置三的长度不变,伸缩装置一伸长或缩短,伸缩装置四缩短或伸长,即可实现上肢肩关节的内收或外展;通过微控制单元控制伸缩装置一和伸缩装置四的长度不变,伸缩装置二伸长或缩短,伸缩装置三缩短或伸长,即可实现上肢肩关节的前屈或后伸;由于步骤一穿戴时关节环一与关节环二间隔固定,当肘部关节运动时,可以通过同时控制肩部关节的四个伸缩装置伸长或缩短,即可实现上肢肩关节的旋内或旋外的被动调节。
肘部关节的两个自由度的运动由肘部2SPS-URU并联机构单独控制,可实现肘部关节的弯曲和摆动。将关节环二与关节环三之间设置的两个伸缩装置编号为伸缩装置五、伸缩装置六,通过微控制单元控制伸缩装置五和伸缩装置六的长度与转动关节的长度差异实现肘部关节的弯曲,通过控制肘部2SPS-URU并联机构的伸缩装置五与伸缩装置六的长度差异实现肘部关节的摆动。
腕部关节的三个自由度由腕部3PRR并联机构单独控制,由于关节环三一端的环形齿轮由步骤一穿戴于手臂上相对手臂静止,故采用齿轮齿条式驱动,通过微控制单元控制电机驱动小齿轮旋转,小齿轮与环形齿轮外啮合带动移动部件在环形齿轮外周向移动。
以关节环三与关节环四之间周向均布有三个移动部件为例,通过微控制单元分别控制三个移动部件上的小电机以改变相邻滑块之间的角度,即可实现手腕关节的旋转、弯曲、摆动。比如:通过微控制单元控制三个滑块周向均布在环形齿轮外,且保持三个滑块具有同一个方向的速度,即可实现手腕关节的旋转;通过微控制单元控制其中两个滑块相对环形齿轮静止,控制第三个滑块运动,即可实现手腕关节的弯曲;同理,其中两个滑块相对环形齿轮静止,控制第三个滑块往复运动,即可实现手腕关节的摆动。
步骤三:通过控制系统控制串并联外骨骼机械臂运动时,施加在伸缩装置上的力和位移的变化、转动关节和移动部件上的力和角度的变化,根据测量得到力、位移、角度的变化进行反馈调节伸缩装置、转动关节、移动部件的运行速度,使运动更加平稳;
步骤四:通过控制系统采集数据求得串并联外骨骼机械臂运动时位姿的变化,评价操作者的完成情况,为操作者合理选择训练程序。
有益效果:与现有技术相比,本发明的优点是:该机构机械臂主要采用电机和舵机作为驱动元件,相对于液压与气动装置,工作可靠、便于安装、且断电能够实现位姿自动保持,极大的提高了安全性;该机构机械臂使用了伸缩装置,可根据不同的人体结构进行调节,适合不同身材操作者使用,具有一般普适性;该机构机械臂使用了力测量单元、位移测量单元、角度测量单元进行反馈调节,提高了串并联外骨骼机械臂运动的精确性。
附图说明
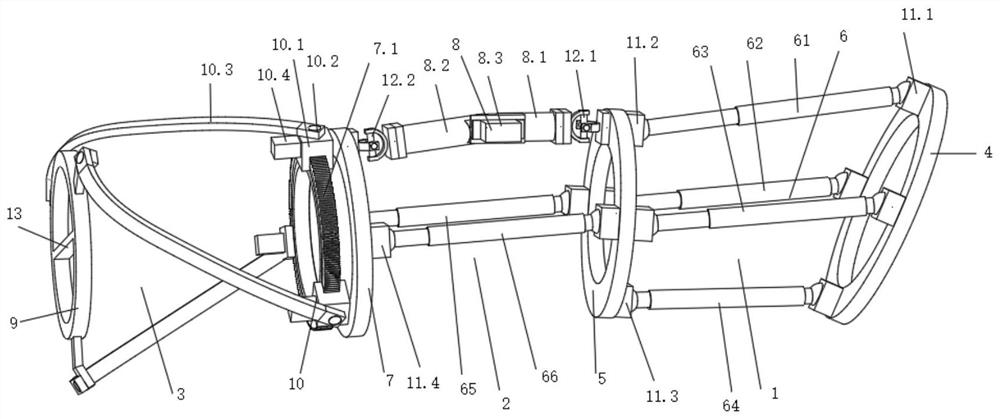
图1为本发明的立体结构示意图;
图2为伸缩装置的立体结构示意图;
图3为转动关节的立体结构爆炸视图;
图4为腕部3PRR并联机构的立体结构示意图;
图5为腕部3PRR并联机构的立体结构爆炸视图;
图6是可穿戴式的串并联外骨骼机械臂的实施原理框图;
图7是用来控制可穿戴式的串并联外骨骼机械臂的系统框图;
图8是根据本发明的可穿戴式的串并联外骨骼机械臂的方法步骤流程图。
具体实施方式
下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
一种可穿戴式串并联外骨骼机械臂,如图1所示,包括依次间隔同轴排列的关节环一4、关节环二5、关节环三7、关节环四9以及伸缩装置6、转动关节8、移动部件10、控制系统,控制系统包括微控制单元14以及分别与其信号连接的力测量单元15、位移测量单元16、角度测量单元17、便携式控制单元19,微控制单元14内嵌有训练软件模块18,便携式控制单元19设有控制界面20,力测量单元15可为负荷传感器,位移测量单元16、角度测量单元17均可为电位计,微控制单元14为单片机,微控制单元14安装于本机械臂上。
伸缩装置6设有多个,在关节环一4与关节环二5之间以及关节环二5与关节环三7之间均有设置,关节环一4与关节环二5之间设有四个呈周向间隔分布的伸缩装置6,其中每个伸缩装置6的两端分别与关节环一4、关节环二5铰接,关节环一4与关节环二5以及两者之间的多个伸缩装置6构成肩部4SPS并联机构1。关节环二5与关节环三7之间设有两个伸缩装置6以及一个转动关节8,三者的两端分别与关节环二5、关节环三7铰接,关节环二5与关节环三7以及两者之间的两个伸缩装置6和一个转动关节8一起构成肘部2SPS-URU并联机构2。关节环三7与关节环四9之间设有多个移动部件10,每个移动部件10的一端分别与关节环三7活动连接,另一端与关节环四9铰接,关节环三7与关节环四9以及两者之间的多个移动部件10构成腕部3PRR并联机构3。
如图6所示,伸缩装置6、转动关节8、移动部件10分别与控制系统连接。
设置于关节环一4与关节环二5之间的伸缩装置6的一端通过球铰一11.1与关节环一4的一端面铰接,另一端通过球铰二11.2与关节环二5的一端面铰接;设置于关节环二5与关节环三7之间的伸缩装置6的一端通过球铰三11.3与关节环二5的另一端面铰接,另一端通过球铰四9与关节环三7的一端面铰接。
如图2所示,伸缩装置6包括外壳6.1、内壳6.2、丝杠6.3、螺母6.4、伺服电机6.5,内壳6.2置于外壳6.1内部,外壳6.1和内壳6.2均为筒状结构且外壳6.1的内径大于内壳6.2的外径,丝杠6.3置于内壳6.2中,伺服电机6.5在外壳6.1的一端安装于其内部并与丝杠6.3的一端连接,内壳6.2靠近伺服电机6.5一端的内部安装有螺母6.4,螺母6.4与丝杠6.3配合连接构成丝杠副,内壳6.2设有螺母6.4的一端的外周面上均布两个凸台6.6,外壳6.1另一端的内部周向分布了两个与凸台6.6横截面相同大小的缺口6.7,在丝杠副工作时,凸台6.6与缺口6.7配合限位,伺服电机6.5与微控制单元14信号连接,每个伸缩装置6上分别安装有一个力测量单元15和一个位移测量单元16。
如图3所示,转动关节8包括外转动件8.1、内转动件8.2、舵机8.3,外转动件8.1一端通过虎克铰一12.1与关节环二5的另一端面铰接,舵机8.3安装于外转动件8.1另一端外周上对应缺口处并与内转动件8.2一端连接,实现外转动件8.1与内转动件8.2的相对转动,内转动件8.2另一端通过虎克铰二1.2与关节环三7的一端面铰接,舵机8.3与微控制单元14信号连接,转动关节8上安装有一个力测量单元15和一个角度测量单元17。
如图4和图5所示,移动部件10包括滑块10.1、转绞一10.2、刚性杆件10.3、小电机10.4、小齿轮10.5、转绞二10.6,关节环三7的另一端面上安装于环形齿轮7.1,滑块10.1的缺口内安装有小齿轮10.5,小齿轮10.5与环形齿轮7.1啮合使滑块10.1与环形齿轮7.1连接,小电机10.4安装于滑块10.1上并与小齿轮10.5连接,刚性杆件10.3的一端通过转绞一10.2与滑块10.1连接,另一端通过转绞二10.6与关节环四9铰接,关节环四9环内安装有可供穿戴者握持的手柄13,小电机10.5与微控制单元14信号连接,每个移动部件10上分别安装有一个力测量单元15和一个角度测量单元17。
通过微控制单元14控制力测量单元15、位移测量单元16、角度测量单元17测量串并联外骨骼机械臂运动时,施加在伸缩装置6上的力和位移的变化、转动关节和移动部件上的力和角度的变化,根据测量得力、位移、角度的变化进行反馈调节伸缩装置6、转动关节8、移动部件10的运行速度,使运动更加平稳。
如图7所示,训练软件模块18为微控制单元14里的一个软件模块,便携式控制单元19采用有线或无线连接控制微控制单元14,方便辅助人员和操作者调试和训练。
一种上述的可穿戴式串并联外骨骼机械臂的运作方法,如图6~8所示,包括以下步骤:
步骤一:操作者将手臂从关节环一4伸入串并联外骨骼机械臂的内部,并将其穿着于手臂外,根据操作者的体型和手臂长度的差异,可调试伸缩装置6的初始长度进行适配,调节完成后,将其固定在操作者的手臂上,操作者用手握住最前端手柄13。
步骤二:通过微控制单元14控制伸缩装置6、移动部件10和转动关节8的运动使得串并联外骨骼机械臂完成所需的相应动作,如弯曲、摆动、伸缩等。
具体来说,肩部关节的三个自由度的运动由肩部4SPS并联机构1单独控制,通过微控制单元14控制肩部关节的四个伸缩装置6长度差异变化,可实现上肢肩关节的前屈或后伸、内收或外展、旋内或旋外。
例如,设定关节环一4与关节环二5之间设置的四个伸缩装置6的编号分别为伸缩装置一61、伸缩装置二62、伸缩装置三63、伸缩装置四64,伸缩装置一61与伸缩装置四64相对,伸缩装置二62与伸缩装置三63相对,通过微控制单元14控制伸缩装置二62和伸缩装置三63的长度不变,伸缩装置一61伸长或缩短,伸缩装置四64缩短或伸长,即可实现上肢肩关节的内收或外展;通过微控制单元14控制伸缩装置一61和伸缩装置四64的长度不变,伸缩装置二62伸长或缩短,伸缩装置三63缩短或伸长,即可实现上肢肩关节的前屈或后伸;由于步骤一穿戴时关节环一4与关节环二5间隔固定,当肘部关节运动时,可以通过同时控制肩部关节的四个伸缩装置6伸长或缩短,即可实现上肢肩关节的旋内或旋外的被动调节。
肘部关节的两个自由度的运动由肘部2SPS-URU并联机构2单独控制,可实现肘部关节的弯曲和摆动。将关节环二5与关节环三7之间设置的两个伸缩装置6编号为伸缩装置五65、伸缩装置六66,通过微控制单元14控制伸缩装置五65和伸缩装置六66的长度与转动关节8的长度差异实现肘部关节的弯曲,通过控制肘部2SPS-URU并联机构2的伸缩装置五65与伸缩装置六66的长度差异实现肘部关节的摆动。
腕部关节的三个自由度由腕部3PRR并联机构3单独控制,由于关节环三7一端的环形齿轮7.1由步骤一穿戴于手臂上相对手臂静止,故采用齿轮齿条式驱动,通过微控制单元14控制电机10.4驱动小齿轮10.5旋转,小齿轮10.5与环形齿轮7.1外啮合带动移动部件10在环形齿轮外周向移动。
以关节环三7与关节环四9之间周向均布有三个移动部件10为例,通过微控制单元14分别控制三个移动部件10上的小电机10.4以改变相邻滑块10.1之间的角度,即可实现手腕关节的旋转、弯曲、摆动。比如:通过微控制单元14控制三个滑块10.1周向均布在环形齿轮7.1外,且保持三个滑块10.1具有同一个方向的速度,即可实现手腕关节的旋转;通过微控制单元14控制其中两个滑块10.1相对环形齿轮静止,控制第三个滑块10.1运动,即可实现手腕关节的弯曲;同理,其中两个滑块10.1相对环形齿轮静止,控制第三个滑块10.1往复运动,即可实现手腕关节的摆动。
步骤三:通过微控制单元14控制力测量单元15、位移测量单元16、角度测量单元17测量串并联外骨骼机械臂运动时,施加在伸缩装置6上的力和位移的变化、转动关节和移动部件上的力和角度的变化,根据测量得力、位移、角度的变化进行反馈调节伸缩装置6、转动关节8、移动部件10的运行速度,使运动更加平稳。
步骤四:通过微控制单元14采集数据求得串并联外骨骼机械臂运动时位姿的变化,评价操作者的完成情况,为操作者合理选择训练程序18.1,易于操作者康复。
- 一种可穿戴式串并联外骨骼机械臂及其运作方法
- 一种新型节能穿戴式外骨骼辅助机械臂