一种自动化装车设备
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及装车设备技术领域,具体为一种自动化装车设备。
背景技术
装车是各行各业都面临的一个巨大难题,在装车环节投入的资金与人力是企业不可忽略的一个巨大开支。随着用人成本的不断增加、市场竞争的加大,产量的提高等一些列的问题出现,让大多数企业不得不重视起来装车的问题。特别是一些粉尘较大的行业,对于装车工人的身体健康带来巨大的伤害,隐形的增加了企业的用人成本。目前的现有技术也有各式各样的装车设备,大多是机器人加输送线、简单码垛机加输送线,简单三轴加输送线等结构。因此,目前的装车设备存在以下问题:装车效率低;制造成本高;柔性适应性差;占用空间大,对现场需要二次施工等。
发明内容
针对背景技术中指出的问题,本发明提出一种自动化装车设备。
本发明的技术方案是这样实现的:
一种自动化装车设备,其特征在于:包括多节伸缩输送线,所述多节伸缩输送线的一端固定设置在升降平台上,所述多节伸缩输送线的另一端固定连接末端码垛小车,所述末端码垛小车包括支撑壳体,所述支撑壳体上转动配合输送转向台,所述输送转向台一侧铰接配合输送臂的一端,所述输送臂的中部铰接配合大气缸的一端,所述大气缸的另一端与所述支撑壳体的外侧壁铰接配合,所述输送臂的中部铰接配合大气缸的一端,所述大气缸的另一端与所述支撑壳体的外侧壁铰接配合,所述输送臂的另一端铰接配合末端执行器,所述末端执行器包括抵接杆,所述抵接杆与所述输送臂抵接配合。
本发明进一步设置为:所述多节伸缩输送线包括自外向内依次套接配合的第一输送线、第二输送线和第三输送线,所述第一输送线包括第一伸缩壳体,所述第一伸缩壳体顶部设置有第一输送带机构,所述第一伸缩壳体底部设置有第一伸缩滑轨,所述第一伸缩滑轨上滑动配合第一伸缩滑轮,所述第二输送线包括第二伸缩壳体,所述第二伸缩壳体顶部设置有第二输送带机构,所述第二伸缩壳体底部设置有第二伸缩滑轨,所述第二伸缩滑轨底部与所述第一伸缩滑轮固定连接,所述第二伸缩滑轨上滑动配合第二伸缩滑轮,所述第三输送线包括第三伸缩壳体,所述第三伸缩壳体顶部设置有第三输送带机构,所述第三伸缩壳体底部设置有第三伸缩滑轨,所述第三伸缩滑轨底部与所述第二伸缩滑轮固定连接。
本发明进一步设置为:所述升降平台包括第一半平台和第二半平台,所述第一半平台设置有升降机构,所述升降机构包括升降支撑架,所述升降支撑架与所述第一输送线底部固定连接,所述升降支撑架底部固定连接油缸,所述第二输送线底部和所述第三输送线底部均设置有滚轮支撑架。
本发明进一步设置为:所述第一伸缩壳体内侧壁设置有第一定位滑槽,所述第二伸缩壳体外侧壁设置有第一定位滚轮,所述第一定位滚轮与所述第一定位滑槽滑动配合,所述第二伸缩壳体内侧壁设置有第二定位滑槽,所述第三伸缩壳体外侧壁设置有第二定位滚轮,所述第二定位滚轮与所述第二定位滑槽滑动配合,所述第一伸缩壳体靠近所述第二伸缩壳体的一端设置有第一缓冲板,所述第二伸缩壳体靠近所述第三伸缩壳体的一端设置有第二缓冲板,所述第三伸缩壳体靠近所述末端码垛小车的一端设置有第三缓冲板。
本发明进一步设置为:所述支撑壳体内设置有支撑架,所述支撑架底部转动配合一组脚轮,每个所述脚轮均固定连接脚轮电机,所述输送转向台包括底台,所述底台上设置有至少两组输送带机构,所述输送带机构包括输送带,所述输送带两端分别啮合配合主动轮和从动轮,所述主动轮和所述从动轮两者的两端均通过轴承固定连接侧板,所述侧板固定设置在所述底台上,所述主动轮一端固定连接第一传动机构,所述支撑壳体顶部固定设置旋转电机,所述旋转电机固定连接输出轴,所述输出轴通过轴承与所述支撑壳体转动配合,所述输出轴另一端固定连接旋转齿轮,所述底台通过设置的回转支承与所述支撑壳体顶部转动配合,所述回转支承与所述旋转齿轮啮合配合。
本发明进一步设置为:所述输送转向台的一侧固定设置阻挡机构,所述阻挡机构包括支撑小架,所述支撑小架包括小横架,所述小横架上固定设置小气缸,所述小气缸包括活塞杆,所述活塞杆固定连接阻挡板,所述阻挡板两端均设置有阻挡滑块,所述阻挡滑块滑动配合阻挡滑轨,所述阻挡滑轨固定设置在所述支撑小架的两端。
本发明进一步设置为:所述输送臂设置有倾斜输送带,所述倾斜输送带的两侧均设置有倾斜挡板,所述末端执行器包括支撑框架,所述支撑框架两侧均设置有挡边,所述支撑框架顶部转动配合一组动力滚筒和随动滚筒,所述动力滚筒和所述随动滚筒间隔分布,所述支撑框架滑动配合左右靠边机构,所述左右靠边机构包括靠边立柱,所述靠边立柱处于所述动力滚筒和所述随动滚筒之间,所述支撑框架内滑动配合滑舌机构,所述支撑框架底部通过设置的旋转轴承转动配合旋转底架的一侧,所述旋转底架的另一侧铰接配合扩展安装板,所述扩展安装板通过设置的铰接杆与所述输送臂铰接配合,所述扩展安装板之间设置有所述抵接杆,所述抵接杆处于所述铰接杆的下方。
本发明进一步设置为:所述动力滚筒一端固定连接第一齿轮和第二齿轮,每个所述动力滚筒上的第一齿轮均啮合配合滚筒链条,所述第二齿轮固定连接第二传动机构。
本发明进一步设置为:所述左右靠边机构包括左靠边板和右靠边板,所述左靠边板和所述右靠边板上均设置有一组所述靠边立柱,所述左靠边板和所述右靠边板两者的两端均滑动配合横杆,所述左靠边板和所述右靠边板分别固定连接第一滑台和第二滑台,所述第一滑台和所述第二滑台均与所述支撑框架固定连接。
本发明进一步设置为:所述滑舌机构包括滑舌架,所述滑舌架远离所述旋转底架的一端抵接配合夹轮机构,所述夹轮机构固定设置在所述支撑框架内,所述滑舌架靠近所述旋转底架的一端固定设置连接板,所述连接板固定连接滑舌链条,所述滑舌链条啮合配合滑舌齿轮,所述滑舌齿轮固定连接滑舌驱动电机,所述连接板两端均固定连接滑舌滑块,所述滑舌滑块滑动配合滑舌滑轨,所述滑舌滑轨固定设置在所述支撑框架内。
综上所述,本发明的有益效果为:
1.设置可升降调节的多节伸缩输送线,便于将集装箱外部的货物输送至集装箱内部,且可以进行自内而外伸缩堆垛;
2.设置具有动力源的脚轮,使得末端码垛小车能够自由行走,并带动多节伸缩输送线进行伸缩;独立工作的多组输送带机构进行速度差设计,可以实现货物的转向;
3.设置输送臂的摆臂作用,可以将货物堆垛到不同高度的位置;
4.设置末端执行器能够调整货物的堆垛位置,实现整齐堆垛货物的功能。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
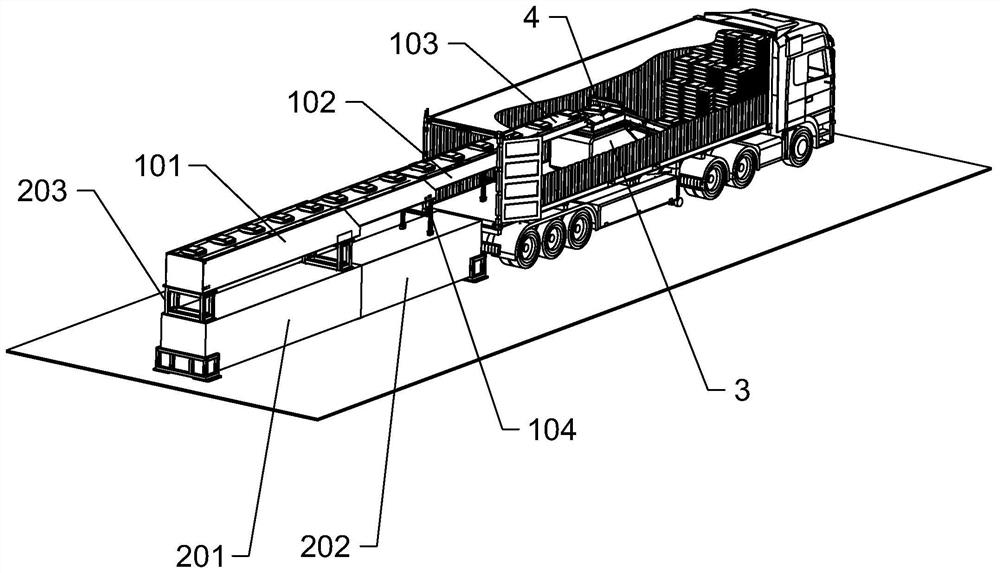
图1为本发明一个视角的立体结构示意图;
图2为本发明另一个视角的立体结构示意图;
图3为本发明中多节伸缩输送线实现伸缩效果的结构示意图;
图4为本发明中第一伸缩壳体与第二伸缩壳体发生铰接作用的结构示意图;
图5为本发明中末端码垛小车的结构示意图;
图6为本发明中末端码垛小车的部分结构示意图;
图7为本发明中输送转向台实现转动效果的结构示意图;
图8为本发明中A处的结构放大图;
图9为本发明中末端码垛小车的部分结构示意图;
图10为本发明中末端执行器的结构示意图
图11为本发明中B处的结构放大图;
图12为本发明中左右靠边机构的结构示意图;
图13为本发明中动力滚筒实现滚动效果的结构示意图
附图标记:1、多节伸缩输送线;101、第一输送线;1011、第一伸缩壳体;1012、第一输送带机构;1013、第一伸缩滑轨;1014、第一伸缩滑轮;102、第二输送线;1021、第二伸缩壳体;1022、第二输送带机构;1023、第二伸缩滑轨;1024、第二伸缩滑轮;103、第三输送线;1031、第三伸缩壳体;1032、第三输送带机构;1033、第三伸缩滑轨;104、滚轮支撑架;105、第一定位滑槽;106、第一定位滚轮;107、第一缓冲板;108、第三缓冲板;2、升降平台;201、第一半平台;202、第二半平台;203、升降支撑架;3、支撑壳体;301、支撑架;302、脚轮;303、脚轮电机;4、输送转向台;401、底台;402、输送带机构;403、侧板;404、旋转电机;405、输出轴;406、旋转齿轮;407、回转支承;5、输送臂;501、倾斜挡板;6、大气缸;7、末端执行器;701、抵接杆;702、支撑框架;703、挡边;704、动力滚筒;705、随动滚筒;706、靠边立柱;707、旋转轴承;708、扩展安装板;709、铰接杆;7010、第一齿轮;7011、第二齿轮;7012、第二传动机构;7013、左靠边板;7014、横杆;7015、第一滑台;7016、第二滑台;8、阻挡机构;801、支撑小架;802、小横架;803、小气缸;804、阻挡板;805、阻挡滑块;806、阻挡滑轨;9、滑舌机构;901、滑舌架;902、夹轮机构;903、滑舌链条;904、滑舌齿轮;905、滑舌驱动电机;906、滑舌滑轨。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如下参考图1-13对本发明进行说明:
一种自动化装车设备,包括多节伸缩输送线1,多节伸缩输送线1的一端固定设置在升降平台2上,多节伸缩输送线1的另一端固定连接末端码垛小车。货物从集装箱外部输送至集装箱内部并堆垛整齐,需要由多节伸缩输送线1进行输送,末端码垛小车进行准确位置的堆垛。
具体地,多节伸缩输送线1包括自外向内依次套接配合的第一输送线101、第二输送线102和第三输送线103,第一输送线101包括第一伸缩壳体1011,第一伸缩壳体1011顶部设置有第一输送带机构1012,第一伸缩壳体1011底部设置有第一伸缩滑轨1013,第一伸缩滑轨1013上滑动配合第一伸缩滑轮1014,第二输送线102包括第二伸缩壳体1021,第二伸缩壳体1021顶部设置有第二输送带机构1022,第二伸缩壳体1021底部设置有第二伸缩滑轨1023,第二伸缩滑轨1023底部与第一伸缩滑轮1014固定连接,第二伸缩滑轨1023上滑动配合第二伸缩滑轮1024,第三输送线103包括第三伸缩壳体1031,第三伸缩壳体1031顶部设置有第三输送带机构1032,第三伸缩壳体1031底部设置有第三伸缩滑轨1033,第三伸缩滑轨1033底部与第二伸缩滑轮1024固定连接。
进一步地,第一伸缩壳体1011内侧壁设置有第一定位滑槽105,第二伸缩壳体1021外侧壁设置有第一定位滚轮106,第一定位滚轮106与第一定位滑槽105滑动配合,第二伸缩壳体1021内侧壁设置有第二定位滑槽,第三伸缩壳体1031外侧壁设置有第二定位滚轮,第二定位滚轮与第二定位滑槽滑动配合,第一伸缩壳体1011靠近第二伸缩壳体1021的一端设置有第一缓冲板107,第二伸缩壳体1021靠近第三伸缩壳体1031的一端设置有第二缓冲板,第三伸缩壳体1031靠近末端码垛小车的一端设置有第三缓冲板108。
为了使得多节伸缩输送线1可以将外部低处位置的货物输送至集装箱高处内部的位置,则第一输送线101具有可以升降的功能,具体地,升降平台2包括第一半平台201和第二半平台202,第一半平台201设置有升降机构,升降机构包括升降支撑架203,升降支撑架203与第一输送线101底部固定连接,升降支撑架203底部固定连接油缸,第二输送线102底部和第三输送线103底部均设置有滚轮支撑架104。
末端码垛小车包括支撑壳体3,在支撑壳体3内设置有支撑架301,支撑架301底部转动配合一组脚轮302,每个脚轮302均固定连接脚轮电机303,以便使得装置可以自由移动。
支撑壳体3上转动配合输送转向台4,在输送转向台4的具体转动结构中,支撑壳体3顶部固定设置旋转电机404,旋转电机404固定连接输出轴405,输出轴405通过轴承与支撑壳体3转动配合,输出轴405另一端固定连接旋转齿轮406,底台401通过设置的回转支承407与支撑壳体3顶部转动配合,回转支承407与旋转齿轮406啮合配合。旋转电机404工作,使得旋转齿轮406与回转支承407相啮合,从而底台401转动,可以对输送方向进行调整。
输送转向台4包括底台401,底台401上设置有至少两组输送带机构402,输送带机构402包括输送带,输送带两端分别啮合配合主动轮和从动轮,主动轮和从动轮两者的两端均通过轴承固定连接侧板403,侧板403固定设置在底台401上,主动轮一端固定连接第一传动机构,第一传动机构是由齿轮、链条及电机进行传动,从而使得主动轮发生转动。多组输送带机构402是相互独立、各自工作,利用独立的输送带机构402上的输送带的速度差正反转实现输送货物的各种角度转动。
进一步地,在输送转向台4的一侧固定设置阻挡机构8,阻挡机构8用于阻挡货物以调整对于货物90°、180°等特殊姿态的输送要求。具体地,阻挡机构8包括支撑小架801,支撑小架801包括小横架802,小横架802上固定设置小气缸803,小气缸803包括活塞杆,活塞杆固定连接阻挡板804,阻挡板804两端均设置有阻挡滑块805,阻挡滑块805滑动配合阻挡滑轨806,阻挡滑轨806固定设置在支撑小架801的两端。小气缸803工作,使得阻挡板804上下滑动对输送货物进行阻挡以调整姿态。
输送转向台4一侧铰接配合输送臂5的一端,输送臂5的中部铰接配合大气缸6的一端,大气缸6的另一端与支撑壳体3的外侧壁铰接配合,输送臂5的另一端铰接配合末端执行器7。大气缸6工作,使得输送臂5上下摆动,从而使得末端执行器7上移或下降。进一步地,输送臂5设置有倾斜输送带,倾斜输送带实现输送动作的结构与输送转向台4上的输送带实现输送动作的结构相同,倾斜输送带的两侧均设置有倾斜挡板501。
末端执行器7实现输送货物靠边并准确定位。具体地,末端执行器7包括支撑框架702,支撑框架702两侧均设置有挡边703,支撑框架702顶部转动配合一组动力滚筒704和随动滚筒705,动力滚筒704和随动滚筒705间隔分布,支撑框架702滑动配合左右靠边机构,左右靠边机构包括靠边立柱706,靠边立柱706处于动力滚筒704和随动滚筒705之间,支撑框架702内滑动配合滑舌机构9,支撑框架702底部通过设置的旋转轴承707转动配合旋转底架的一侧,旋转底架的另一侧铰接配合扩展安装板708,扩展安装板708通过设置的铰接杆709与输送臂5铰接配合,扩展安装板708之间设置有抵接杆701,抵接杆701处于铰接杆709的下方,输送臂5与扩展安装板708铰接一定角度后与抵接杆701相抵接。
在动力滚筒704实现滚动效果的具体结构中,动力滚筒704一端固定连接第一齿轮7010和第二齿轮7011,每个动力滚筒704上的第一齿轮7010均啮合配合滚筒链条,第二齿轮7011固定连接第二传动机构7012,第二传动机构7012是由齿轮、链条及电机进行传动。
为了使得在末端执行器7上的货物能够靠边或定位下货,左右靠边机构包括左靠边板7013和右靠边板,左靠边板7013和右靠边板上均设置有一组靠边立柱706,左靠边板7013和右靠边板两者的两端均滑动配合横杆7014,左靠边板7013和右靠边板分别固定连接第一滑台7015和第二滑台7016,第一滑台7015和第二滑台7016均与支撑框架702固定连接。
滑舌机构9包括滑舌架901,滑舌架901远离旋转底架的一端抵接配合夹轮机构902,夹轮机构902固定设置在支撑框架702内,夹轮机构902由两个夹轮组成,对滑舌架901起到位置稳定的作用。滑舌架901靠近旋转底架的一端固定设置连接板,连接板固定连接滑舌链条903,滑舌链条903啮合配合滑舌齿轮904,滑舌齿轮904固定连接滑舌驱动电机905,连接板两端均固定连接滑舌滑块,滑舌滑块滑动配合滑舌滑轨906,滑舌滑轨906固定设置在支撑框架702内。因此,滑舌架901可以进行伸出或缩进,便于接住末端执行器7上的货物,起到过渡作用。
以上所述的仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种袋包自动化装车系统的装车龙门架
- 一种悬挂升降厢车装车自动化设备