一种分解炉破拆机器人
文献发布时间:2023-06-19 12:02:28
技术领域
本发明属于分解炉技术领域,具体涉及一种分解炉破拆机器人。
背景技术
分解炉是一个燃料燃烧、热量交换和分解反应同时进行的新型热工设备,其种类和形式繁多。基本原理是:在分解炉内同时喂入经预热后的生料、一定量的燃料以及适量的热气体,生料在炉内呈悬浮或沸腾状态;在900℃以下,燃料进行无焰燃烧,同时高速完成传热和碳酸钙分解过程。分解炉内壁上往往会随使用时间而沉积大量难以清理的结皮,目前多是采用人工清理的方式,劳动强度大,且危险性较高。
发明内容
本发明的目的在于提供一种分解炉破拆机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种分解炉破拆机器人,包括液压站和抬升支架,所述抬升支架上安装有伸缩臂,所述伸缩臂的前端安装回转平台,所述回转平台上安装机械手,所述液压站包括电机、柱塞泵、液压油箱、电控箱和信号接收器,所述电机驱动连接柱塞泵,柱塞泵将液压油箱内的液压油泵入、泵出伸缩臂和机械手,所述电控箱电性连接电机和柱塞泵,信号接收器信号连接遥控器。
优选的,所述抬升支架包括立柱、拉杆一、拉杆二、拉杆三,所述立柱的上端设置下托座,所述拉杆一的上端连接下托座的侧边,拉杆一的下端固定在地面上,立柱的各个方向均设置拉杆一,从而将立柱固定稳定,相邻立柱上端的下托座之间连接拉杆二,所述拉杆三的一端连接附墙座,所述附墙座安装在墙壁上,所述拉杆三的另一端连接伸缩臂的侧面,所述立柱内竖直螺接丝杆,所述丝杆的上端安装上托座。
优选的,所述伸缩臂包括固定臂、一级臂、二级臂、固定板、油缸,所述固定板安装在上托座的上端面,所述固定臂安装在固定板的上端面,所述固定臂的内部活动连接一级臂,所述一级臂的内部活动连接二级臂,所述固定臂上还安装有油缸,所述油缸包括两个一级油缸,一个一级油缸的油缸套筒末端安装在固定臂上,伸缩杆的前端连接一级臂;另一个一级油缸安装在一级臂的内部,伸缩杆连接二级臂。
优选的,所述回转平台包括固定座、回转座、护罩、照明灯,所述固定座安装在二级臂的外端,所述回转座安装在固定座上,回转座由回转支承和回转马达组成,回转马达驱动回转支承旋转,所述回转座上安装护罩,护罩前端设置照明灯。
优选的,所述机械手包括大臂、二臂、三臂、转锤油缸、摇杆连杆、工作属具和液压油缸,所述大臂的下端转动安装在回转座上,所述大臂的上端转动连接二臂的一端,所述二臂的另一端转动连接三臂的一端,所述三臂的另一端转动连接工作属具,所述大臂、二臂和三臂分别通过一个液压油缸驱动旋转,所述三臂上且位于工作属具的上侧转动设置摇杆连杆,所述三臂的侧面连接转锤油缸,所述转锤油缸的输出端连接摇杆连杆,所述摇杆连杆的外端连接工作属具。
优选的,所述电控箱的一侧设置散热器,用于对液压油箱进行散热。
优选的,所述电机、柱塞泵、液压油箱、电控箱和信号接收器均安装在移动式底座内。
本发明的技术效果和优点:该分解炉破拆机器人,通过操作遥控器,使液压站控制回转平台、伸缩臂、机械手运转,进行全方位遥控的破碎、清拆作业,可在高温、高粉尘、易坍塌的危险区域中灵活地进行全方位的破碎、清拆作业,取代传统人工进入炉体内部进行作业,不仅能避免人工易发生的危险,也大幅度的提升了工作效率,而且通过遥控控制,方便灵活。
附图说明
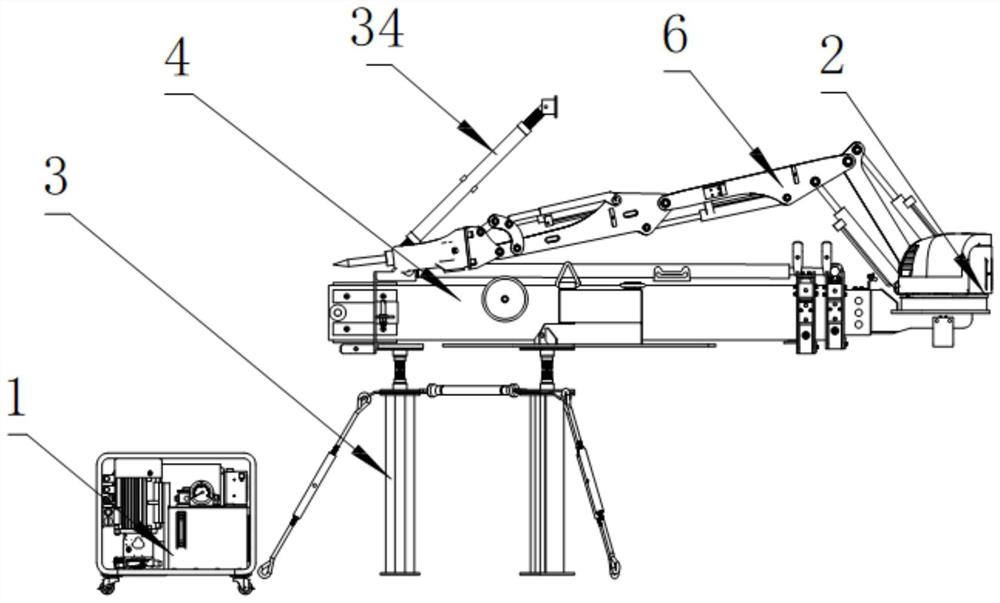
图1为本发明的结构示意图;
图2为本发明的伸缩臂结构示意图;
图3为本发明的回转平台结构示意图;
图4为本发明的抬升支架结构示意图;
图5为本发明的机械手结构示意图;
图6为本发明的液压站结构示意图;
图7为本发明的CAN总线图。
图中:1、液压站;11、电机;12、柱塞泵;13、液压油箱;14、散热器;15、移动式底座;16、电控箱;17、信号接收器;2、回转平台;21、固定座;22、回转座;23、护罩;24、照明灯;3、抬升支架;31、立柱;32、拉杆一;33、拉杆二;34、拉杆三;35、附墙座;36、下托座;37、丝杆;38、上托座;4、伸缩臂;41、固定臂;42、一级臂;43、二级臂;44、固定板;45、油缸;6、机械手;61、大臂;62、二臂;63、三臂;64、转锤油缸;65、摇杆连杆;66、工作属具;67、液压油缸。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
本发明提供了如图1-7所示的一种分解炉破拆机器人,包括液压站1和抬升支架3,抬升支架3上安装有伸缩臂4,伸缩臂4的前端安装回转平台2,回转平台2上安装机械手6,液压站1包括电机11、柱塞泵12、液压油箱13、电控箱16和信号接收器17,电机11驱动连接柱塞泵12,柱塞泵12将液压油箱13内的液压油泵入、泵出伸缩臂4和机械手6,电控箱16电性连接电机11和柱塞泵12,信号接收器17信号连接遥控器,电控箱16的一侧设置散热器14,用于对液压油箱13进行散热;电机11、柱塞泵12、液压油箱13、电控箱16和信号接收器17均安装在移动式底座15内,移动式底座15由框架和万向轮组成,方便移动。液压站1整体轻便、可进行快捷的移动,主电压采用380V 50Hz,控制电压采用24V,能为伸缩臂4、回转平台2、机械手6提供动力和控制,实现远程操作;
在机器人的通信方式选择上,采用有线和无线相结合的方式,可以根据具体的工作环境和拆除任务在有线和无线通信方式之间进行选择。为保证机器人控制系统具有良好的响应特性和模块扩展性,机器人的通信系统采用CAN总线通信模式,利用红外遥控技术、蓝牙通信技术建立集成了机器人的整个通信系统,如图7所示,包括CAN总线控制器、遥控发射器、遥控接收器、传感器、状态监控器等模块组成。
液压站1的液压系统采用基于脉宽调制的电液比例系统进行控制,组成电液比例控制系统的基本元件有控制手柄、控制器、脉宽调制(PWM)驱动电路、电液比例阀及执行机构等部分,通过遥控手柄产生控制信号,控制电液比例先导阀的输出压力,从而控制主换向阀阀芯的位置,实现控制工作液压缸的工作速度,遥控手柄主要由双遥杆(万向)无线/有线信号发射系统(遥控器)、无线/有线信号接收转换系统组成。遥控器是便携式拴在操作人员的腰部,接收器安装在机架内,接收天线通过磁座放在机体外部。
电液比例阀采用PWM调节方式进行控制,通过改变PWM信号的占空比来调节流过比例电磁铁线圈的平均电流,以降低摩擦、减少电磁铁的滞环和死区现象,提高电液比例阀的响应速度。
抬升支架3包括立柱31、拉杆一32、拉杆二33、拉杆三34,立柱31的上端设置下托座36,拉杆一32的上端连接下托座36的侧边,拉杆一32的下端固定在地面上,立柱31的各个方向均设置拉杆一32,从而将立柱31固定稳定,相邻立柱31上端的下托座36之间连接拉杆二33,拉杆三34的一端连接附墙座35,附墙座35安装在墙壁上,拉杆三34的另一端连接伸缩臂4的侧面,立柱31内竖直螺接丝杆37,丝杆37的上端安装上托座38,拉杆一32、拉杆二33使立柱与地面固定,拉杆三34加固伸缩臂4,丝杆37和下托座36、上托座38间可调动一定距离,以适应立柱31增加后的高度差距,抬升支架3可以使设备在不同高度平面进行作业,使之达到覆盖整个炉体内部清拆、破碎的效果。
伸缩臂4包括固定臂41、一级臂42、二级臂43、固定板44、油缸45,固定板44安装在上托座38的上端面,固定臂41安装在固定板44的上端面,固定臂41的内部活动连接一级臂42,一级臂42的内部活动连接二级臂43,固定臂41上还安装有油缸45,所述油缸45包括两个一级油缸,一个一级油缸的油缸套筒末端安装在固定臂41上,伸缩杆的前端连接一级臂42;另一个一级油缸安装在一级臂42的内部,伸缩杆连接二级臂(43),两个一级油缸共同伸缩,使伸缩臂4可以进行两级伸缩,伸缩臂4的加入可以大幅度的提升机械手6的作业范围。
回转平台2包括固定座21、回转座22、护罩23、照明灯24,固定座21安装在二级臂43的外端,回转座22安装在固定座21上,回转座22由回转支承和回转马达组成,又包含有回转底座、回转支承、多路阀,回转马达驱动回转支承旋转,回转马达为液压马达,通过多路阀控制液压油的进出,从而控制液压马达的启停,回转座22上安装护罩23,护罩23前端设置照明灯24。
机械手6包括大臂61、二臂62、三臂63、转锤油缸64、摇杆连杆65、工作属具66和液压油缸67,大臂61的下端转动安装在回转座22上,大臂61的上端转动连接二臂62的一端,二臂62的另一端转动连接三臂63的一端,三臂63的另一端转动连接工作属具66,大臂61、二臂62和三臂63分别通过一个液压油缸67驱动旋转,使得大臂61、二臂62和三臂63的旋转角度大,增加了整体可操作范围,三臂63上且位于工作属具66的上侧转动设置摇杆连杆65,三臂63的侧面连接转锤油缸64,转锤油缸64的输出端连接摇杆连杆65,摇杆连杆65的外端连接工作属具66,通过转锤油缸64推拉工作属具66进行角度调节,使得工作属具66的调节角度更大,机械手6是由三节臂组成的动作机构,能达到工作多自由度、大范围摆动的效果,能有效避免清拆、破碎时的死角。
该分解炉破拆机器人在使用的过程中,通过操作遥控器,使液压站1控制回转平台2、伸缩臂4、机械手6运转,进行全方位遥控的破碎、清拆作业,伸缩臂4大幅度的提升机械手6的作业范围,回转平台2可带动机械手6进行水平方向旋转,机械手6采用三节臂组成的动作机构,能达到工作多自由度、大范围摆动的效果,且工作属具66通过转锤油缸64驱动,进一步提高工作范围。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种分解炉破拆机器人
- 一种回转窑窑衬破拆机器人及破拆方法