一种双水箱液面高度自适应容错控制方法及系统
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及液位控制领域,特别是涉及一种双水箱液面高度自适应容错控制方法及系统。
背景技术
液位控制是生活与工业生产中经常涉及到的控制问题,诸如生活用水供应、食品加工等行业的成产加工过程中,经常需要使用蓄水箱,如进料罐、中间缓冲器等,水箱中的液位需要维持合适的高度,既不能太满溢出产生浪费,也不能过低无法保证需求。因而在工业过程控制中,液面高度是一个很重要的控制对象。
工业生产中水箱内液体持续消耗,需要加注液体维持液面。液体加注会引起液面波动,如何控制液面在维持一定高度时的动态变化,避免突然升高或减少,对于保证物料进出均衡、生产过程平稳进行有重要作用。现有技术一般以PID或简单模糊控制方法为主,这类方法虽然可以对液面高度进行控制,但对过程中引起的动态变化无法有效控制。
并且,除了控制液面高度之外,管道阀门在此类潮湿的生产环境中,很容易锈蚀故障,从而严重影响到液面控制。而且已有的故障检测方法都是与控制方法分离设计。
基于上述关于液面控制问题,亟需一种既能排除故障同时又能满足动态特性需求的控制方法。
发明内容
本发明的目的是提供一种双水箱液面高度自适应容错控制方法及系统,能够准确控制水箱液面高度并检测、排除阀门故障。
为实现上述目的,本发明提供了如下方案:
一种双水箱液面高度自适应容错控制方法,包括:
获取第一水箱的当前时刻液面高度与初始时刻液面高度、第二水箱的当前时刻液面高度与初始时刻液面高度以及第一水箱的给定高度轨迹;所述第二水箱的液面高度间接控制第一水箱的液面高度;
根据所述第一水箱的当前时刻液面高度与初始时刻液面高度以及所述第一水箱的给定高度轨迹确定跟踪误差;
获取预设性能函数;
根据所述预设性能函数和所述跟踪误差确定转换误差变量;
根据所述第一水箱的当前时刻液面高度与初始时刻液面高度、所述转换误差变量、所述跟踪误差以及所述第一水箱的给定高度轨迹确定虚拟控制律;所述虚拟控制律用于控制第二水箱的液面高度;
根据所述预设性能函数、所述转换误差变量以及所述虚拟控制律确定阀门的流量控制律;并根据所述阀门的流量控制律控制阀门的液体流量大小;
根据所述预设性能函数以及所述虚拟控制律确定监控函数;
根据所述监控函数判断所述阀门是否出现故障;
若出现故障,则关闭故障阀门,同时顺次打开备用阀门,并更新监控函数;
若没有出现故障,则继续监控。
可选地,所述根据所述预设性能函数和所述跟踪误差确定转换误差变量,具体包括:
利用公式z
其中,z
可选地,所述根据所述第一水箱的当前时刻液面高度与初始时刻液面高度、所述转换误差变量、所述跟踪误差以及所述第一水箱的给定高度轨迹确定虚拟控制律,具体包括:
利用公式
其中,α
可选地,所述根据所述预设性能函数、所述转换误差变量以及所述虚拟控制律确定阀门的流量控制律,具体包括:
利用公式
其中,v为阀门的流量,c
可选地,所述根据所述预设性能函数以及所述虚拟控制律确定监控函数,具体包括:
利用公式
其中,M
一种双水箱液面高度自适应容错控制系统,包括:
参数获取模块,用于获取第一水箱的当前时刻液面高度与初始时刻液面高度、第二水箱的当前时刻液面高度与初始时刻液面高度以及第一水箱的给定高度轨迹;所述第二水箱的液面高度间接控制第一水箱的液面高度;
跟踪误差确定模块,用于根据所述第一水箱的当前时刻液面高度与初始时刻液面高度以及所述第一水箱的给定高度轨迹确定跟踪误差;
预设性能函数获取模块,用于获取预设性能函数;
转换误差变量确定模块,用于根据所述预设性能函数和所述跟踪误差确定转换误差变量;
虚拟控制律确定模块,用于根据所述第一水箱的当前时刻液面高度与初始时刻液面高度、所述转换误差变量、所述跟踪误差以及所述第一水箱的给定高度轨迹确定虚拟控制律;所述虚拟控制律用于控制第二水箱的液面高度;
阀门的流量控制模块,用于根据所述预设性能函数、所述转换误差变量以及所述虚拟控制律确定阀门的流量控制律;并根据所述阀门的流量控制律控制阀门的液体流量大小;
监控函数确定模块,用于根据所述预设性能函数以及所述虚拟控制律确定监控函数;
故障判断模块,用于根据所述监控函数判断所述阀门是否出现故障;
故障确定模块,用于若出现故障,则关闭故障阀门,同时顺次打开备用阀门,并更新监控函数;
继续监控模块,用于若没有出现故障,则继续监控。
可选地,所述转换误差变量确定模块具体包括:
转换误差变量确定单元,用于利用公式z
其中,z
可选地,所述虚拟控制律确定模块具体包括:
虚拟控制律确定单元,用于利用公式
其中,α
可选地,所述阀门的流量控制模块具体包括:
阀门的流量控制律确定单元,用于利用公式
其中,v为阀门的流量,c
可选地,所述监控函数确定模块具体包括:
监控函数确定单元,用于利用公式
其中,M
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明所提供的一种双水箱液面高度自适应容错控制方法及系统,根据水箱的液面高度以及给定高度轨迹确定跟踪误差以及转换误差变量,进而确定阀门的流量控制律,即设计,自适应控制方法综合液面高度与期望的液面高度计算得到阀门的液体流量大小,进而控制液面高度变化,达到液面高度跟踪目标;进一步为了监测阀门是否发生故障,设计监控函数,监控液面变化检测故障情况,当检测到阀门发生故障时,切断故障阀门,启用备用阀门,实现故障排除。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
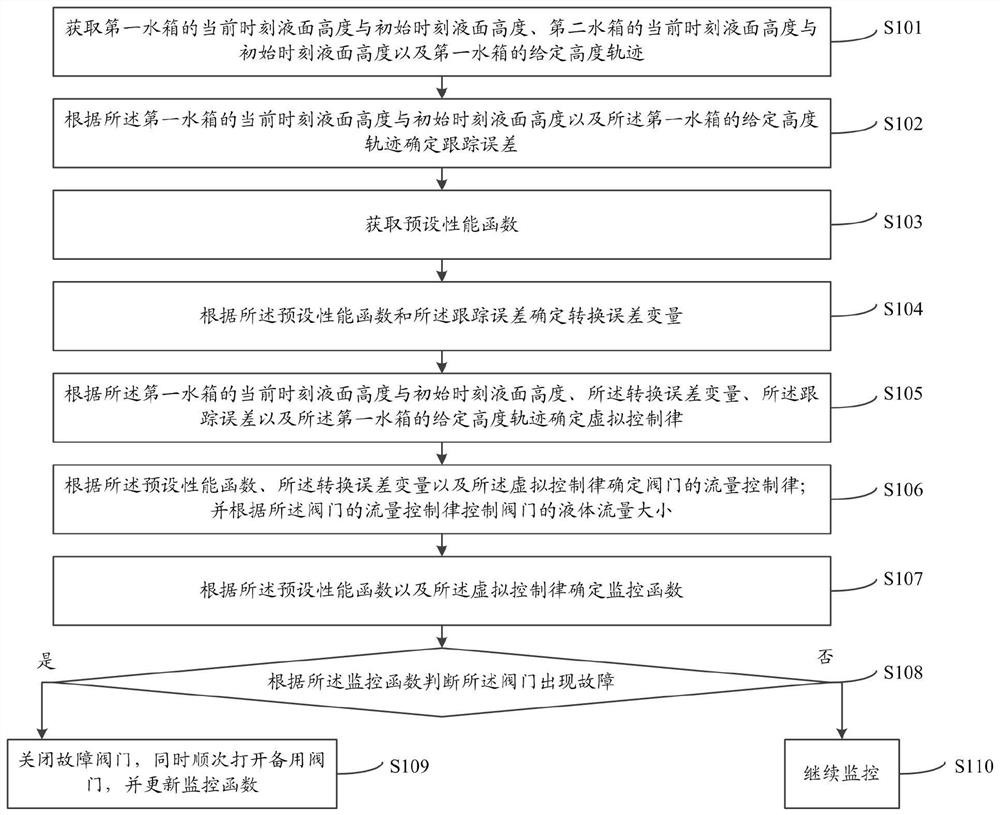
图1为本发明所提供的一种双水箱液面高度自适应容错控制方法流程示意图;
图2为本发明所提供的一种双水箱液面高度自适应容错控制方法原理示意图;
图3为双水箱液面控制系统的结构布局示意图;
图4为本发明所提供的一种双水箱液面高度自适应容错控制系统结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种双水箱液面高度自适应容错控制方法及系统,能够准确控制水箱液面高度并检测、排除阀门故障。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明所提供的一种双水箱液面高度自适应容错控制方法流程示意图,图2为本发明所提供的一种双水箱液面高度自适应容错控制方法原理示意图,如图1和图2所示,本发明所提供的一种双水箱液面高度自适应容错控制方法,包括:
S101,获取第一水箱的当前时刻液面高度与初始时刻液面高度、第二水箱的当前时刻液面高度与初始时刻液面高度以及第一水箱的给定高度轨迹;所述第二水箱的液面高度间接控制第一水箱的液面高度。
如图3所示,分析与构建双水箱液面控制系统模型,根据公式(1)确定双水箱液面控制系统模型。
h
第一水箱的当前时刻液面高度差值x
其中,
其中各项系数由(1)式中的各物理量计算得到,表示如下:
由于液体外流系数a
S102,根据所述第一水箱的当前时刻液面高度与初始时刻液面高度以及所述第一水箱的给定高度轨迹确定跟踪误差。
利用公式∈=x
S103,获取预设性能函数。
S104,根据所述预设性能函数和所述跟踪误差确定转换误差变量。
S104具体包括:
利用公式z
其中,z
误差变量z
预设性能函数使跟踪误差∈被限制在该函数下,从而保证跟踪的瞬时性能,有效减少液面高度波动。
转换函数通过
S105,根据所述第一水箱的当前时刻液面高度与初始时刻液面高度、所述转换误差变量、所述跟踪误差以及所述第一水箱的给定高度轨迹确定虚拟控制律;所述虚拟控制律用于控制第二水箱的液面高度。
S105具体包括:
利用公式
其中,α
进一步的,
S106,根据所述预设性能函数、所述转换误差变量以及所述虚拟控制律确定阀门的流量控制律;并根据所述阀门的流量控制律控制阀门的液体流量大小。
S106具体包括:
利用公式
其中,v为阀门的流量,c
其中,
S107,根据所述预设性能函数以及所述虚拟控制律确定监控函数。
S107具体包括:
利用公式
其中,M
S108,根据所述监控函数判断所述阀门是否出现故障。
S109,若出现故障,则关闭故障阀门,同时顺次打开备用阀门,并更新监控函数。
S110,若没有出现故障,则继续监控。
如果备用阀门有多个,则可进行容纳多次故障,此时k可反映监控到的故障次数。例如,k=1时即表示已检测到1次故障并关闭了1号阀门。运行开始时,没有故障发生,令k=0,t
如果阀门不发生故障,∈和z
如果∈或z
这一步将检验系统性能是否满足设计要求,并且适当调节控制参数。借助于常用的数值计算和控制系统仿真工具MATLAB进行。
参数a、p
本发明用于控制水箱液面高度,通过预设性能控制方法可以调节误差收敛的动态特性,减少液面波动;通过自适应控制方法在系统参数不确定的情况下仍能进行控制,降低系统辨识难度;通过监控函数使阀门发生严重故障时能及时关闭并切换冗余阀门;通过监控函数构成虚拟检测器,不需要使用专门的硬件对阀门单独进行故障检测,节约成本。
图4为本发明所提供的一种双水箱液面高度自适应容错控制系统结构示意图,如图4所示,本发明所提供的一种双水箱液面高度自适应容错控制系统,包括:
参数获取模块401,用于获取第一水箱的当前时刻液面高度与初始时刻液面高度、第二水箱的当前时刻液面高度与初始时刻液面高度以及第一水箱的给定高度轨迹;所述第二水箱的液面高度间接控制第一水箱的液面高度。
跟踪误差确定模块402,用于根据所述第一水箱的当前时刻液面高度与初始时刻液面高度以及所述第一水箱的给定高度轨迹确定跟踪误差。
预设性能函数获取模块403,用于获取预设性能函数。
转换误差变量确定模块404,用于根据所述预设性能函数和所述跟踪误差确定转换误差变量。
虚拟控制律确定模块405,用于根据所述第一水箱的当前时刻液面高度与初始时刻液面高度、所述转换误差变量、所述跟踪误差以及所述第一水箱的给定高度轨迹确定虚拟控制律;所述虚拟控制律用于控制第二水箱的液面高度。
阀门的流量控制模块406,用于根据所述预设性能函数、所述转换误差变量以及所述虚拟控制律确定阀门的流量控制律;并根据所述阀门的流量控制律控制阀门的液体流量大小。
监控函数确定模块407,用于根据所述预设性能函数以及所述虚拟控制律确定监控函数。
故障判断模块408,用于根据所述监控函数判断所述阀门是否出现故障。
故障确定模块409,用于若出现故障,则关闭故障阀门,同时顺次打开备用阀门,并更新监控函数。
继续监控模块410,用于若没有出现故障,则继续监控。
所述转换误差变量确定模块404具体包括:
转换误差变量确定单元,用于利用公式z
其中,z
所述虚拟控制律确定模块405具体包括:
虚拟控制律确定单元,用于利用公式
其中,α
所述阀门的流量控制模块406具体包括:
阀门的流量控制律确定单元,用于利用公式
其中,v为阀门的流量,c
所述监控函数确定模块407具体包括:
监控函数确定单元,用于利用公式
其中,M
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种双水箱液面高度自适应容错控制方法及系统
- 基于增强型双幂次趋近律和快速终端滑模面的刚性航天飞行器有限时间自适应容错控制方法