基于深度相机的碎石封层质量检测装置
文献发布时间:2023-06-19 12:04:09
技术领域
本发明型属于工程机械技术领域,涉及一种沥青路面养护时同步碎石封层表面碎石质量检测方法与装置。
背景技术
随着公路建设的快速发展以及科技的进步,同步碎石封层技术作为一种经济、高效、快速的路面养护技术,在公路工程中得到了广泛的应用。同步碎石封层是用同步碎石封层车将碎石及粘结材料(改性沥青或改性乳化沥青)同步铺洒在路面上,通过胶轮压路机或自然行车碾压形成单层沥青碎石磨耗层,主要作为路面表处层使用。
碎石封层表面沥青和碎石颗粒融合互相嵌入的均匀度与表面的平整度会严重影响路面整体受力及沥青面层的抗剪能力,进而影响道路的使用寿命。现有技术通过沥青用量和碎石用量来衡量同步碎石封层的施工质量,而不能描述同步碎石封层铺洒时的均匀性和压路机碾压后的平整度,因此只通过沥青和碎石用量的多少来衡量碎石封层的质量还远远不够。
发明内容
本发明型的目的是提供一种同步碎石封层质量检测装置,对铺洒和压实之后的碎石均匀度和平整度进行检测,并提高检测精度。
为实现上述目的,本发明型的主要内容为:
一种基于深度相机的碎石封层质量检测装置,包括有自动控制升降采集模块、图像处理模块、编码器采集模块、电源控制模块,可以通过铰链连接机构连接在同步碎石封层车或胶轮压路机后,保证在施工中实时检测碎石封层的施工质量。
自动控制升降采集模块包含两个深度相机、采集卡和自动控制升降装置。
在检测装置后方布置两个深度相机,利用深度相机来获取碎石封层的图像。深度相机与普通的工业相机如线相机或面相机,最大的不同是深度相机是一种3D相机,普通的工业相机拍摄的图像能看到相机视角内的所有物体并记录下来,但是其所记录的数据并不包含这些物体像素距离相机的距离。我们仅仅只能通过图像的语义分析来判断哪些物体离我们比较远,哪些比较近,但是并没有确切的数据。而深度相机则不仅会获得物体的彩色图像,也会根据不同的测距原理获取物体距离相机的深度信息。在这里采用深度相机来获取碎石封层表面的彩色图像和深度图像,封层表面的深度图像数据即为封层表面图像上每像素点距离相机所在水平面的距离。
在碎石封层表面的工作环境下,因为光照和检测精度的影响,选用因特尔公司的realsense D435i深度相机,其工作原理是基于双目视觉三角形法来获得碎石封层表面距离相机的深度数据。Realsense D435i的获取彩色图像和深度图像最大分辨率为1920x1080,帧率最大为30HZ图像,最大视野为70°x 42.5°,在0.2m~4m的范围内获取的深度数据精度在1mm范围内,配备全局快门和宽视野,非常适合用于在快速移动的场景中捕获深度数据。
自动升降装置后方布置的两个深度相机,有交叉重叠区域,利用特征匹配算法把封层表面彩色图像拼接,获取更宽广的碎石封层表面图像。
自动升降装置主要由升降电机控制装置、升降梯形丝杠装置、升降梯形推座装置组成。电机控制装置通过伺服电机自动控制主动齿轮转动,进而带动从动轮和升降丝杠转动,可以按需要调节升降梯形推座,即调节两个深度相机距离碎石封层表面的位置。
相机离封层表面越近,则获取的封层图像里包含的内容越少,甚至会被小车挡住部分视野,相机离封层表面越远,则获取的封层图像里会包含更多的内容,并在一定精度范围内,获取更大的视野图像,有利于对封层质量的分析。在不同的封层情况下调节深度相机的垂直位置,可以避免遮挡相机的视野或获取更宽广的图像视野。
在升降梯形推座装置部分上,深度相机安装架安装在升降台稳定面上,可以对深度相机进行横向水平调节。
计算两个相机获取的碎石封层表面彩色图像的灰度图和直方图,以直方图的像素均值为阈值,对直方图进行二值化处理,得到碎石封层表面的二值化图像,再对二值化图像进行滤波处理,利用carry算法对碎石封层表面的滤波图像进行边缘检测,描绘出碎石封层表面的碎石颗粒轮廓,再利用SURF特征提取算法提取封层表面的碎石颗粒,设定一规定阈值,根据特征提取的特征点数来描述碎石颗粒的稀疏密度,进而可以描述碎石封层表面的碎石颗粒分布信息。
利用深度相机获取碎石封层表面的深度图像数据,把深度图像数据通过采集卡传输进工控机,对深度数据进行分析,并把深度图像对应到同时获取的碎石封层表面的彩色图像上,确定获取的彩色图像上各像素点对应的深度信息,并筛选出深度信息突变比较严重的区域,利用相机获取的深度信息来描述碎石封层表面的平整度。
两深度相机之间通过同步记录线连接起来,保证两相机可以同步记录碎石封层表面图像,并通过图像采集卡,把获取到的图像传输到工控机。
图像处理模块包含有工控机、显示屏,把采集到的碎石封层表面图像输入到工控机里,利用软件对表面图像进行处理分析,并在显示屏上显示记录。
编码器采集模块安装在碎石封层质量检测装置的轮胎轴上,当小车连接在同步封层车或压路机后方跟随前进时,编码器会记录小车前进的路程,并传输到工控机上,和碎石封层表面图像一起进行处理,当检测到不合格的碎石封层表面时,会标记出确切时刻的不合格部位,便于对碎石封层均匀度的评价。
附图说明
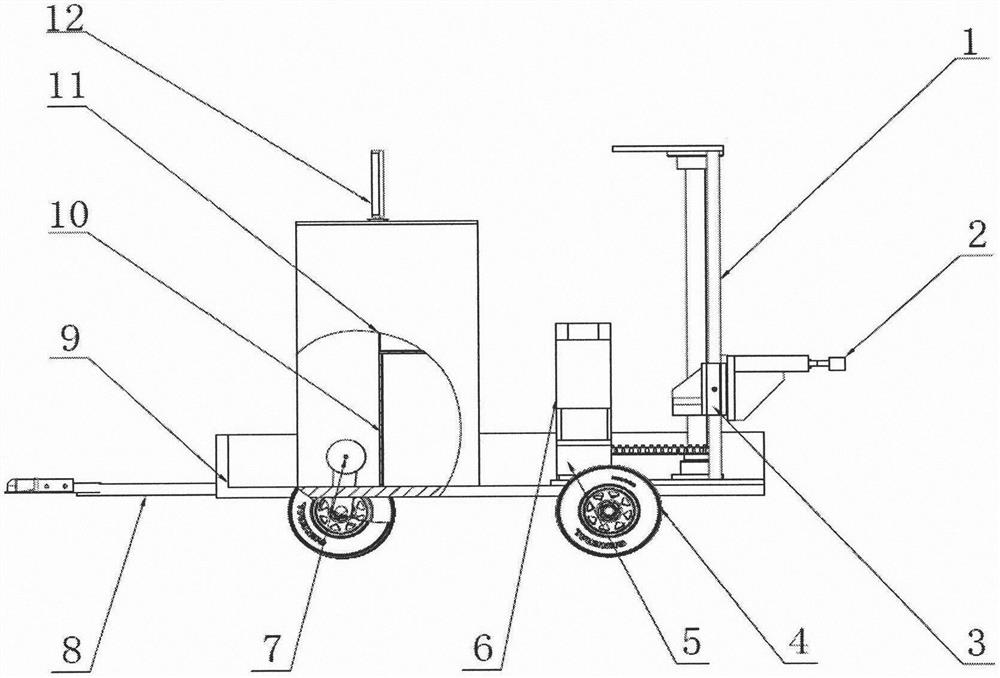
图1是本发明型碎石封层质量检测装置整体结构示意图;
图2是本发明型自动控制升降采集模块图;
图3是本发明型升降梯形移动模块图;
图4是本发明型编码器模块图;
图5是本发明型的原理流程图。
图中,1.自动升降采集模块,2.相机采集模块,3.升降梯形移动模块,4小车轮胎,5.升降控制模块,6.伺服电机模块,7.编码器组件模块,8.铰链连接模块,9小车车架,10.电源控制模块,11.数据处理模块,12.显示屏,13.升降导轨滑杆,14.升降梯形丝杠,15.升降台梯形稳定面,16.深度相机安装架,17.深度相机,18.升降梯形丝杠螺母,19.升降梯形推座,20.升降梯形推板,21.升降梯形转动齿轮,22.升降梯形丝杠支座,23.传动链轮,24.升降电机固定座,25.伺服电机,26.编码器转动轮,27.欧姆龙编码器,28.编码器摇臂组件,29.编码器固定座,30.编码器同步轮
具体实施方式
下面将结合本发明型实施例中的附图,对本发明型实施例中的技术方案进行清楚、完整地描述。
目前同步碎石封层撒布质量没有统一的评价标准和检测工具,不利于道路施工质量的检测和提高,本方案的思路是采用深度相机来采集碎石封层的彩色图像和深度图像信息,并对采集的图像进行算法过滤处理,碎石分布边缘检测描述,并提取碎石稀疏分布情况,判定碎石封层分布的均匀度;对深度图像进行深度分析,制定评价指标,来评价封层表面的撒布质量平整度。
优选地,如图1所示,基于深度相机的碎石封层质量检测装置,主要包括有整体小车车架8,自动升降采集模块1、编码器组件模块7、伺服电机模块6、铰链连接模块8,电源控制模块10,数据处理模块11。自动升降采集模块1通过螺栓安装在小车车架后方,编码器采集模块7通过其中的编码器固定座29安装在车架底座,编码器同步轮通过平键连接在小车轮轴上,记录小车行进的路径,并传输到数据处理模块11。
优选地,如图2所示,所述自动控制升降采集模块1由相机采集模块2,升降梯形移动模块3,升降控制模块5,伺服电机模块6组成,所述相机采集模块2主要由两个深度相机17,相机采集卡,相机伸展架16,升降台梯形稳定面15组成,所述两个深度相机17通过螺栓安装在相机伸展架16前端,所述升降台梯形稳定面15通过螺栓固定连接在两个升降梯形推座19上,升降台梯形稳定面15右侧开两阶梯口,所述相机伸展架16的两个梯形架安装在梯形稳定面15的两个开口内,便于相机的横向调节;
优选地,所述升降梯形移动模块包含有升降导轨滑杆13,升降梯形丝杠14,升降梯形丝杠螺母18,升降梯形推座19,升降梯形推板20,升降梯形转动齿轮21,升降梯形丝杠支座22。所述升降梯形丝杠14最下方通过两个不同轴颈规格的轴承连接固定在升降梯形丝杠支座22上,升降梯形丝杠支座22四周有四个螺栓孔,通过螺栓孔固定在升降采集模块1的底座上;所述升降梯形丝杠14下方有平键口,通过平键连接到升降梯形转动齿轮21;所述升降梯形丝杠14中间部分为螺纹,升降梯形丝杠螺母18穿过升降梯形丝杠14,通过升降梯形丝杠螺母18通过螺栓与升降梯形推板20连接,保证升降梯形丝杠螺母18与升降梯形推板20一起移动;升降梯形丝杠14上方通过一个轴承连接固定在梯形丝杠支座上,并利用螺栓固定在顶座。
优选地,所述升降梯形丝杠14左右两侧,两根升降导轨滑杆13固定在顶座和底座,并分别穿过升降梯形推座19;所述升降梯形推座19和升降梯形推板20,分别通过四个螺栓与升降梯形稳定台15连接,带动升降梯形稳定台15上下升降;
优选地,所述升降控制模块5通过伺服电机25倒立安装在升降电机固定座24上,在升降电机固定座24里伺服电机25的外伸轴颈通过平键连接主动齿轮,进而通过传动链条23带动升降梯形转动齿轮21和升降丝杆14转动,可以随意调节升降梯形推座3,即调节两个深度相机距离封层表面的位置。
优选地,自动升降台稳定面可通过升降丝杆14调节深度相机17距离封层表面的位置,此处升降丝杆14的参数总长度为600mm,可以调节深度相机距离地面500mm~1100mm的范围距离。
优选地,如图4所示为编码采集模块7。所述编码器采集模块7由编码器转动轮26,欧姆龙编码器27,编码器摇臂组件28,编码器固定座29,编码器同步轮30组成。把小车轮胎的轮轴穿过编码器的固定座上和编码器同步轮30上,带动同步轮30转动,编码器同步轮30通过带传动带动转动轮26转动,转动轮26和编码器27的转轴连接,欧姆龙编码器通过转轴的转动,实时记录小车行进的路径,并传输到工控机11,把封层表面图像信息和编码器采集到的路径信息结合起来,可以实时定位每一图像所在的位置。
优选地,所述数据处理模块包含有工控机11、显示屏12,把采集到的封层表面图像输入到工控机11里,利用软件对表面图像进行处理分析,并在显示屏12上显示记录。
优选地,如图5所示为碎石封层表面的流程图,在工控机11里计算融合的封层表面彩色图像的灰度图和直方图,以直方图的像素均值为阈值,对直方图进行二值化处理,得到封层表面的二值化图像;再对二值化图像进行滤波处理,利用carry算法对封层表面的滤波图像进行边缘检测,描绘出封层表面上的碎石颗粒的轮廓,利用SURF特征提取算法提取表面的碎石颗粒,设定一规定阈值,根据特征提取的特征点数来描述碎石颗粒的稀疏密度,进而可以描述表面上的碎石颗粒的分布信息。
优选地,在工控机11里对获取的深度数据进行分析,并把深度图像对应到同时获取到的封层表面的彩色图像上,确定获取的彩色图像上每像素点到相机所对应的深度信息,并筛选出深度信息突变比较严重的区域,利用相机获取的深度信息来描述表面上的平整度。
本发明型在使用时,封层表面检测装置可以通过铰链连接模块9连接到封层同步车后方,根据不同的封层和需求精度在显示屏11上调节相机采集模块2的横向和纵向距离,两个深度相机离封层表面越近,则获取的封层图像里包含的内容越小,甚至会被小车挡住部分视野,相机离封层表面越远,则获取的封层图像里会包含更多的内容,并在一定精度范围内,获取更大的视野图像更有利于对封层路况的分析。在不同的封层情况下可任意调节深度相机的垂直位置,避免遮挡相机的视野或获取更宽广的图像视野。在显示屏12上利用工控机11对获取的数据图像进行分析,并判断碎石封层表面的均匀度与平整度信息。
以上,仅为本发明型较佳的具体实施方式,但本发明型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明型揭露的技术范围内,根据本发明型的技术方案及其发明型构思加以等同替换或改变,都应涵盖在本发明型的保护范围之内。
- 基于深度相机的碎石封层质量检测装置
- 基于深度相机与机器学习的糖果缺陷检测装置及分类方法