基于BIM的施工平台与机器人系统
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及建筑机器人技术领域,具体涉及一种基于BIM的施工平台与机器人系统。
背景技术
建筑业是经济发展的重头戏,尤其在国内,建筑业处于快速发展中,并将会持续相当长时期,随着城市化进程的不断推进,建筑业永不落幕。新建筑物不断建设,各种异性结构的楼房、场馆不断涌现,新兴的装配式结构建筑快速发展,与此同时,不少在高速发展中建造的建筑物逐渐变得老旧,需要经过改造从而跟上时代需求。然而目前我国的建筑业面临几大突出难题,劳动力成本高且日益短缺、安全事故易发、生产效率低下,同时工程建设建造设备和工业化水平比较低,机械化、自动化程度较低,目前尚需大量人工施工。
国内建筑工人群体老龄化日益突出,建筑劳动力持续紧缺,而建筑工程施工是一项高危工作,建筑安全事故高发是国内建筑产业一大痛点。生产效率低下,工程周期延长,同时存在人为误差引起的工程返工,导致生产效率下降和工程成本进一步上升。国内工程建设设备方面:脚手架用材巨大,安全性低,不适用于高层建筑,吊篮承载小,安全系数低,且需建筑物完成后安装,高空作业车作业高度与范围存在局限性,爬架体积庞大且不能快速灵活升降。附着式电动施工平台出现以来解决了不少施工难题,但目前所有的附着式电动施工平台都只是作为工人施工的承载体,只停留在提供工人作简单施工的设备,以及供给工人作为人和货升降运输的作用,而且绝大部分只用于外墙装修时使用,只是个别厂家设备结构更优化,但都存在机械化、自动化程度极低,使用率低,使用效率也低等问题。防护性不高、存在安全隐患。
新楼房和异形结构建筑的外墙装修和施工需要,新兴的装配式结构建筑兴起,附着式电动施工平台的需求量不断增大。附着式电动施工平台是外墙装修作业的不二选择,装配式建筑的兴起,塔吊与附着式电动施工平台可完美结合,更加使附着式电动施工平台需求增加的同时功能要更先进和智能。建筑机器人的出现,相对于建筑工人逐渐从协助向协同和部分替代进行发展,完成如打磨、清洗、喷漆作业,解决了日益明显的建筑业劳动力短缺,安全事故高发、生产效率低下,施工质量低下等问题。机器人以自动化、高效性、安全性、可靠性等优点成为解决行业痛点的有效方式。同时,附着式电动施工平台作为建筑机器人的使用载体也带动机器人的需求量,加速建筑机器人的发展。
发明内容
针对现有技术的不足,本发明公开了一种基于BIM的施工平台与机器人系统,用于解决上述存在的问题。
本发明通过以下技术方案予以实现:
本发明公开一种基于BIM的施工平台与机器人系统,包括
基于BIM的远程监控管理中心平台,附着式电动施工平台通过防水滑触线提供电源,所述附着式电动施工平台每一模块安装有传感器,用于实时将平台的每一处受力变形、位移信息传达到远程终端监控管理中心平台的三维模型;
建筑机器人,包括巡检机器人,用于监测平台上所有角落,通过终端可视化控制巡检机器人快速到达平台上指定区域,还包括打磨机器人,通过激光雷达实时呈现打磨前的墙面,施工人员或管理人员可通过现场或远程管理中心平台操控打磨机器人作业,打磨机器人打磨后墙面平整度实时反馈到可视化终端;
所述打磨机器通过更换机器人的末端执行器实现清洗机器人和喷涂机器人功能。
更进一步的,所述建筑机器人结合附着式电动施工平台时,包括底座、标准节立柱、顶部标准节立柱、防水滑触线、驱动模块、作业平台、凸出模块、电控箱、护栏、顶棚、风速仪、防护网、附墙架、废料管道、滑触线、拖曳式集电器、巡检机器人、导轨式外墙作业机器人、自走式外墙作业机器人、自走式打磨机器人、自走式清洗机器人和自走式喷涂机器人。
更进一步的,所述底座包括设有操作扳手的可调支腿、伸缩连杆、框架大、防冲撞缓冲器、水平传感器、定位销轴、密封条和万向轮;
所述设有操作扳手可调支腿为密封结构包括扳手、防护盖、密封胶圈、滑动轴承、轴承盖、T型螺母、螺母顶块和梯形螺杆,所述扳手连接密封方管内的T型螺母;
所述底座安装有水平传感器,在底座出现倾斜或振动,所述水平传感器实时监测报警同时控制系统停止附着式电动施工平台升降;
所述底座设有防冲撞缓冲器,所述伸缩连杆由框架大管套合伸缩连杆以及密封条组成。
更进一步的,所述标准节立柱安装有施工电梯用标准齿条和倾角传感器,当立柱发生轻微倾斜或受力变形时,所述倾角传感器会将数据实时反馈到终端的管理中心平台中;
所述顶部标准节立柱安装有倾角传感器,将监测数据实时反馈到终端的管理中心平台中,所述倾角传感器为无线带电池倾角传感器。
更进一步的,所述驱动模块包括驱动模块框架、刹车减速电机、手动释放装置、传动齿轮、防坠器、水平传感器、压力传感器、雷达、警示灯、限位滚轮、齿条背轮、限位开关和集电器接线盒;
所述驱动模块通过刹车减速电机提供动力,传动齿轮啮合安装在标准节立柱上的标准齿条使作业平台上升下降,所述刹车减速电机带有自锁功能且其尾部带有刹车装置,所述刹车装置设置手动释放装置,突然断电时,所述刹车减速电机断电抱闸,刹车装置将作业平台抱紧在当前位置;
所述驱动模块设有防坠器,所述驱动模块安装有限位滚轮,所述限位滚轮为偏心滚轮,所述限位滚轮将所述驱动模块定位在标准节立柱上;所述驱动模块安装有齿条背轮,所述齿条背轮为偏心轮;
所述驱动模块安装有限位开关,所述限位开关分别设置上限位开关、超上、下限位开关、下限位开关以及紧急上限位开关。当作业平台到达顶部标准节立柱时,限位开关会触碰到顶部立柱的限位模块,使作业平台不再上升,当下级作业平台到达地面处时,下限位开关触碰到底部标准节立柱的限位模块时,作业平台不再继续下降;
所述驱动模块安装有水平传感器,发生倾斜,实时监控的管理中心平台将会报警提示;所述驱动模块装有片式压力传感器,用于实时监测驱动模块的重力情况;
所述雷达安装在所述驱动模块框架的底部;所述驱动模块装有警示灯和集电器接线盒,所述集电器接线盒通过与安装在标准节立柱上的防水滑触线连接,为设备提供电源。
更进一步的,所述作业平台由一体式作业平台标准节组装而成,所述一体式作业平台标准节之间采用销轴相连接,一体式作业平台标准节之间还装有位移传感器,实时监测作业平台的每一处受力变形;
所述一体式作业平台标准节设有可伸缩装配结构,通过加装伸缩脚手板增加作业平台的宽度以贴进建筑体墙面,平台伸缩梁端部预留了干挂位,增加挂件在外墙装修干挂幕墙时,将幕墙干挂件挂在干挂架上,通过作业平台的升降功能,上升到安装钢挂件相应位置,将钢挂件对准到位,即可安装幕墙钢挂件;
所述作业平台采用销轴式重力传感器与驱动模块相连接,通过采集两端销轴式重力传感器数据获得平台重量以及平台上的载荷重量,监测系统通过采集传感器数据限制吊机或叉车等将物料放到作业平台。
更进一步的,所述护栏为铝合金标准网框护栏,外侧护栏为围蔽式铝合金材质网框结构,所述护栏入口处设有推拉式双开门,所述推拉式双开门上装有接近开关;
所述顶棚采用复合材料为装配式可打开结构,所述顶棚打开处有密封条,所述顶棚设有伸缩架体,所述顶棚与所述护栏装配式连接,所述顶棚端部预留机器人用一体式组合导轨安装孔,安装巡检机器人导轨和滑触线;
所述附墙架由焊接框架、扣件、附墙杆、穿墙膨胀螺栓组成,所述附墙架连接在两个标准节立柱之间,所述附墙杆使用扣件连接附墙框和标准节立柱通过穿墙膨胀螺栓附着在建筑体上;
所述凸出模块为选配模块,所述凸出模块与驱动模块相连接,在二级凸出模块中设置伸缩爬梯,打开人孔翻板通过人孔和伸缩爬梯进出上一级作业平台,一级凸出模块设有门,所述凸出模块处配有可装拆的小型吊机;
所述风速仪安装在作业平台两端的顶棚上,监测风力风载,当风速超过设定值时,监测控制系统禁止作业平台升降作业;
所述防护网为铝合金材质网框,在作业平台的标准节立柱处设置防护网,所述防护网两侧设置门,可以通过打开门将建筑垃圾倒到废料管道,在标准节立柱处中间处安装快速直通废料管道,将垃圾倒进废料管道的开口连通到地面的废料收纳车。
更进一步的,所述电控箱采用摇杆操作控制作业平台升降,所述电控箱设有漏电保护装置,所述电控箱的屏幕用于显示报警信息
所述作业平台之间采用4G通讯模块保持连接通讯,将即时数据和实时监控信息传达到管理中心平台,所述4G通讯模块即时收集统计数据和实时监控信息进行连续不断平稳传送,管理人员通过终端的管理中心平台通过4G通讯模块发送指令到电控箱来执行相应任务
设置无线通讯模块,接入现场施工控制系统的无线通讯模块,通过局域网的连接保障通讯的实时性;所述附着式电动施工平台连接有不间断电源UPS。
更进一步的,所述作业平台安装有巡检机器人,所述顶棚内侧靠近墙面处预留安装孔,安装所述巡检机器人的吊装导轨,所述吊装导轨与巡检机器人供电用滑触线并排安装,所述巡检机器人拖曳式集电器通过与滑触线连接供电,所述巡检机器人设有高清摄像机和红外热成像摄像机,实时监控现场的画面、声音、温度、烟雾、气体数据,并将监控画面和信息呈现到管理中心平台,所述巡检机器人设有探照灯;
所述自走式外墙作业机器人为更换末端执行器的自走式多功能外墙作业机器人,所述自走式外墙作业机器人通过拖曳式集电器与滑触线连接供电,所述滑触线安装在所述顶棚离墙端部处,位于两个立柱阻挡处,绕过标准节立柱安装在防护网的框架上,所述自走式外墙作业机器人带有GPS定位,通过终端的手机或平板电脑上管理中心平台上的机器人三维模型,实时监控机器人,所述自走式外墙作业机器人设有机械臂,用于伸展到标准节立柱附墙处作业;
所述自走式打磨机器人为装上打磨头的自走式外墙作业机器人,所述自走式打磨机器人通过激光检测墙面平整度,并反馈到管理中心平台里,通过终端远程控制自走式打磨机器人打磨墙面作业,末端执行器的打磨头设有力感传感器,打磨后的墙面通过激光传感器反馈到管理中心平台上,所述管理中心平台可通过远程控制所述自走式打磨机器人的速度和打磨精度;
所述自走式清洗机器人为更换末端执行器的自走式外墙作业机器人,所述自走式清洗机器人设有水箱和高压水枪;
所述自走式喷涂机器人为末端执行器更换为喷涂头的自走式外墙作业机器人,所述自走式喷涂机器人在作业平台上行走和喷涂;
更进一步的,所述附着式电动施工平台融合导轨式外墙作业机器人施工,所述导轨式外墙作业机器人通过安装在作业平台上的可装拆导轨行走,当所述导轨式外墙作业机器人装在作业平台离墙近端时,采用导轨加外支撑轮的方式保持机器人自身平衡,当所述导轨式外墙作业机器人装在作业平台离墙远端时,采用上下导轨的夹持形式来保持机器人的平衡;
所述外墙作业机器人执行墙面施工作业前,扫描墙面轮廓到管理中心平台,所述管理中心平台通过指定路线将位置坐标反馈到作业机器人,从定好的原点开始作业到指定地点完成,实现自动施工作业。
本发明的有益效果为:
本发明基于BIM技术建立整个系统全方位三维模型的管理中心平台,实时监测和控制现场建设情况,将现场施工情况和设备参数信息整合起来,使管理者实时掌握设备和施工现场的真实状态,实现基于 BIM技术的施工项目自动化、智能化、信息化管理。
本发明基于BIM技术将现场实物建立成全方位的三维模型,在管理中心平台实时监测和控制设备,可最大化利用附着式电动施工平台结合建筑机器人作不同工种的作业,建筑机器人可以与工人同时施工作业,互不干扰影响,实现人机结合,减少人工作业,提高施工质量,大大提高设备的使用率以及施工效率,基于BIM技术构建的管理中心平台可更科学化、智能化管理现场整个施工系统。
本发明将建筑废料快速输送管道结合到附着式电动施工平台里,不仅解决了高层清理大量建筑废料的难题,而且减少了大量的清理垃圾时间,大大节约人力成本,将建筑废料管道放到标准节立柱里,同时不影响升降平台的结构,甚至不占用设备空间,合理的利用了标准节立柱中空位置的剩余空间,为规范化作业、智能化施工、机器人作业提供极大便利。
本发明采用防水滑触线和集电器提供设备电源,解决了一般附着式电动施工平台的电缆不好管理以及容易出现纠缠甚至卷扬机卡位电缆被拉断的情况,同时解决了两级平台间电缆的缠绕和打结,以及电缆过长不好管理等问题。
本发明附着式电动施工平台融合的巡检机器人和多功能外墙作业机器人真正实现人机结合,附着式电动施工平台作为众多建筑机器人的载体,可应用多种机器人施工作业,机器人不仅限于外墙作业施工,自走式作业机器人可通过附着式电动施工平台进入到建筑物里作内部装修施工作业。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
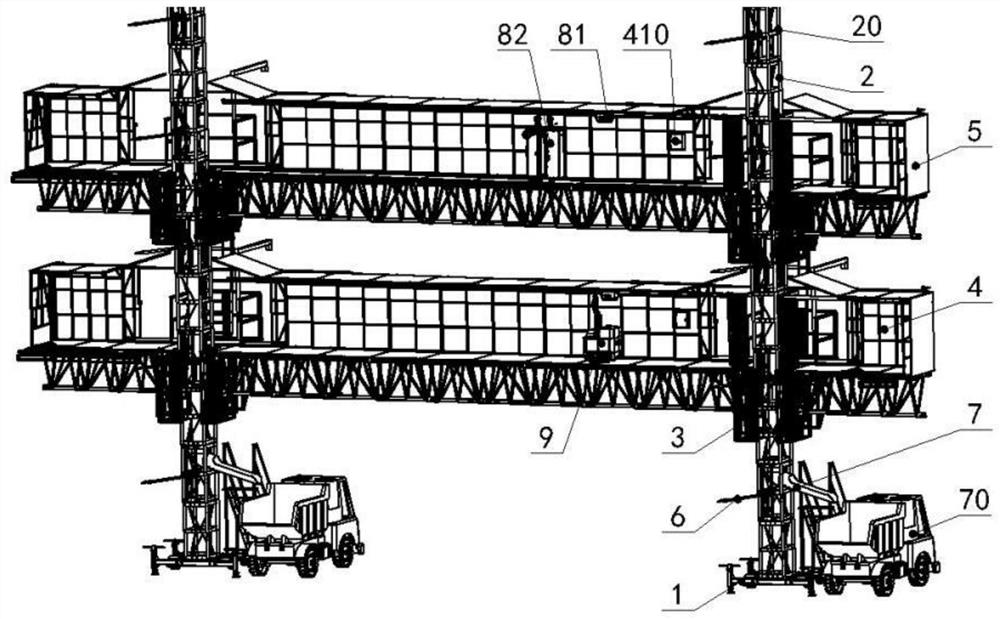
图1为附着式电动施工平台结合多功能外墙作业机器人结构原理图;
图2为可调节底座结构原理图;
图3为底座可调支腿结构原理图;
图4为标准节立柱和顶部标准节立柱结构原理图;
图5为驱动模块后视方向结构原理图;
图6为为驱动模块前视方向结构原理图;
图7为作业平台结构原理图;
图8为凸出模块结构原理图;
图9为附墙架结构原理图;
图10为快速废料输送管道和可打开侧门的防护网结构原理图;
图11为自走式多功能外墙作业机器人以及滑触线和拖曳式集电器结构原理图;
图12为机器人经过附着式电动施工平台立柱处结构原理图;
图13为巡检机器人和导轨式外墙作业机器人结构原理图;
图中的标号分别代表:
1、底座,10、可调支腿,11、伸缩连杆,12、框架大管,13、防冲撞缓冲器,14、水平传感器,15、定位销轴,16、密封条,17、万向轮,18、扳手,19、防护盖,110、密封胶圈,111、滑动轴承,112、轴承盖,113、T型螺母,114、螺母顶块,115、梯形螺杆;
2、标准节立柱,20、顶部标准节立柱,21、防水滑触线,22、防护网,23、限位模块,24、倾角传感器,25、标准齿条;
3、驱动模块,30、驱动模块框架,31、刹车减速电机,32、手动释放装置,33、传动齿轮,34、防坠器,35、水平传感器,36、压力传感器,37、雷达,38、警示灯,39、限位滚轮,310、齿条背轮,311、限位开关,312、集电器接线盒;
4、作业平台,40、凸出模块,41、作业平台标准节,42、伸缩脚手板,43、位移传感器,44、销轴,45、销轴式重力传感器,46、小型吊机,47、人孔翻板,48、门,49、伸缩爬梯,410、电控箱;
5、护栏,50、顶棚,51、风速仪,52、双开门,53、接近开关, 54、密封条,55、内立杆;
6、附墙架,60、焊接框架,61、扣件,62、附墙杆,63、穿墙膨胀螺栓;
7、废料管道,70、废料收纳车;
8、滑触线,80、拖曳式集电器,81、巡检机器人,82、导轨式外墙作业机器人,83、导轨;
9、自走式外墙作业机器人,91、自走式打磨机器人,92、自走式清洗机器人,93、自走式喷涂机器人。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
本实施例中,参照图1所示附着式电动施工平台结合建筑机器人包括底座1、标准节立柱2、顶部标准节立柱20、防水滑触线21、驱动模块3、作业平台4、凸出模块40、电控箱410、护栏5、顶棚50、风速仪51、防护网22、附墙架6、废料管道7、滑触线8、拖曳式集电器80、巡检机器人81、导轨式外墙作业机器人82、自走式外墙作业机器人9、自走式打磨机器人91、自走式清洗机器人92、自走式喷涂机器人93。
参照图2所示的,所述底座1包括自带操作扳手的可调支腿10(参照图3所示),伸缩连杆11,框架大管12,防冲撞缓冲器13,水平传感器14、定位销轴15,密封条16,万向轮17。所述自带操作扳手可调支腿10包括扳手18、防护盖19、密封胶圈110、滑动轴承111、轴承盖112、T型螺母113、螺母顶块114、梯形螺杆115。自带操作扳手避免复杂的施工现场丢失操作手柄,所述可调支腿10为密封结构,扳手18连接密封方管内的T型螺母113,根据杠杆原理,可通过操作扳手18轻松实现可调支腿10的纵向调节,从而调整底座1的水平度,整个底座1通过操作可调支腿10使万向轮17着地,轻松搬运整个底座1。
本实施例的底座1安装有水平传感器14,一旦地基出现地陷或者轻微地震,底座1出现轻微倾斜或振动,所述水平传感器14实时监测报警同时控制系统停止附着式电动施工平台升降,管理人员通过终端的可视化管理中心平台报警信号作相应处理。所述底座1配有防冲撞缓冲器13,防止驱动模块框架30与底座1硬性接触。所述伸缩连杆由框架大管12套合伸缩连杆11以及密封条16组成,所述密封条16可防止水汽进入底座1方管,在一些沿海盐雾密度大的地区,防止腐蚀架体。将伸缩连杆拉伸到最大量时可使底座1增大受力面积范围,使整个设备更平稳。
参照图4所示,本实施例的标准节立柱2为施工电梯通用标准节,规格为650x650x1508,采用标准化的通用件可方便快捷的采购到非常成熟的标准件。节省制作工装夹具的成本和加工时间。所述标准节立柱2安装有施工电梯用标准齿条25,在所述标准节立柱2上安装有倾角传感器24,当立柱发生轻微倾斜或受力变形时,所述倾角传感器24 会将数据实时反馈到终端的管理中心平台中。
本实施例的顶部标准节立柱20在常规标准节立柱2上加装了限位模块23,同样,所述顶部标准节立柱20安装有倾角传感器24,将监测数据实时反馈到终端的管理中心平台中。
本实施例的倾角传感器可选无线带电池倾角传感器,即使停电状态,倾角传感器仍实时监测立柱垂直度。
本实施例的附着式电动施工平台通过防水滑触线21提供电源,解决了电缆供电电缆线会缠绕和电缆在两级之间的阻碍影响设备正常使用得问题,同时当平台上升到150米高空时不至于因电缆过长而不好处理,以及解决了卷扬机收纳电缆会出现的打结、扭绕的问题。所述防水滑触线21安装在标准节立柱2上,上、下级作业平台可共用同一滑触线互不干涉。
实施例2
本实施例中,参照图5所示,所述驱动模块3包括驱动模块框架 30、刹车减速电机31、手动释放装置32、传动齿轮33、防坠器34、水平传感器35、压力传感器36、雷达37、警示灯38、限位滚轮39、齿条背轮310、限位开关311、集电器接线盒312。所述驱动模块3作为附着式电动施工平台的动力总成,其传动特征为:通过刹车减速电机31提供动力,传动齿轮33啮合安装在标准节立柱2上的标准齿条 25使作业平台4上升下降,所述刹车减速电机31带有自锁功能,同时所述刹车减速电机31尾部带有刹车装置,
在刹车装置处增加手动释放装置32,一旦发生突然断电,所述刹车减速电机31断电抱闸,刹车装置将作业平台4牢牢抱紧在当前位置。所述作业平台4上的人员可通过操作手动释放装置32松开刹车装置,缓慢地将平台下降到地面处。
本实施例的驱动单元带有防坠器34,当设备发生意外下坠时达到防坠器34设定速度,所述防坠器34会紧紧将齿轮抱闸,牢牢地将作业平台4固定在当时位置,起到防坠作用。
参照图6所示,本实施例的驱动模块3安装有限位滚轮39,所述限位滚轮39为偏心滚轮,限位滚轮将所述驱动模块3定位在标准节立柱2上,调节偏心的限位滚轮39与标准节立柱2的圆形立杆紧贴合,可使所述驱动模块3不会晃动。
本实施例的驱动模块3安装有齿条背轮310,所述齿条背轮310 为偏心轮,在所述驱动模块3装配到标准节立柱2后,调节偏心的齿条背轮310紧贴安装在标准节立柱2上的标准齿条25,可使齿轮齿条啮合传动受力更好,齿条减少变形量,同时,传动过程更平稳。
本实施例的驱动模块3安装有限位开关311,所述限位开关311 分别有上限位开关,超上、下限位开关,下限位开关以及紧急上限位开关。当作业平台4到达顶部标准节立柱20时,限位开关311会触碰到顶部立柱的限位模块,使作业平台4不再上升,同理,当下级作业平台4到达地面处时,下限位开关311触碰到底部标准节立柱2的限位模块时,作业平台4不再继续下降。
本实施例的驱动模块3安装有水平传感器35,所述水平传感器35 可实时监测所述驱动模块3的水平状态,一旦发生倾斜,实时监控的管理中心平台将会报警提示,管理监测人员将派人排查异常,作出相应处理。
本实施例的驱动模块3装有压力传感器36,能够准确监测放上所述驱动模块3处物料的重量,所述压力传感器36为片式压力传感器,可实时监测所述驱动模块3上的重力情况,避免吊机将过重物品放在所述驱动模块3上,当叉车或外部吊机将超过设定值重量的物件放在驱动模块3上时,监测系统会发出警报,警示灯38闪烁,管理中心平台也会同时出现报警提示。
本实施例的雷达37安装在所述驱动模块框架30的底部,当下级的作业平台4下降到离地面小于安全距离时,所述雷达37将信号控制所述刹车减速电机31停止运行。同理,当下级的作业平台4上升或者上级的作业平台4下降到小于两级作业平台之间的安全距离时,安装在上级驱动模块3的雷达37会监测信号,将刹车减速电机31停止运转并抱闸,使所述作业平台4不会超越安全距离范围。
本实施例的驱动模块3装有警示灯38,当作业平台4正常下降时所述警示灯38会闪烁,当监控系统监测到异常时所述警示灯38会发出报警信号,此时,所述刹车减速电机31会断电抱闸,禁止设备上升下降。
本实施例的驱动模块3安装有集电器接线盒312,所述集电器接线盒312通过与安装在标准节立柱2上的防水滑触线21连接,为设备提供电源。
实施例3
本实施例中,参照图7所示所述作业平台4由一体式作业平台标准节41组装而成,所述一体式作业平台标准节41为平台梁框架与脚手板整合一体式标准节,所述一体式平台标准节直接减少了单独脚手板的框架,减轻重量的同时,一体式结构更好,更结实,同时减少工人先要装好平台梁再安装脚手板的过程。
本实施例的一体式作业平台标准节41之间采用销轴44相连接,两个一体式作业平台标准节41之间还装有位移传感器43,实时监测作业平台4的每一处受力变形。一体式作业平台标准节41预留可伸缩装配结构,可通过加装伸缩脚手板42增加作业平台的宽度以贴进建筑体墙面。平台伸缩梁端部预留了干挂位,可通过增加挂件在外墙装修干挂幕墙时,将幕墙干挂件挂在干挂架上,通过作业平台4的升降功能,上升到安装钢挂件相应位置,工人只需将钢挂件对准到位,即可安装幕墙钢挂件。所述作业平台4采用销轴式重力传感器45与驱动模块3 相连接,通过采集两端销轴式重力传感器数据即可获得平台重量以及平台上的载荷重量,监测系统通过采集传感器数据限制吊机或叉车等将物料放到作业平台上。
本实施例的护栏5为铝合金标准网框护栏,为了施工安全需围蔽式施工,外侧护栏为围蔽式铝合金材质网框结构,进一步减轻整体重量,同时减少风速和风压对作业平台4施加的压力,护栏入口处带有推拉式双开门52,最大可打开将近五米,方便叉车和吊机将物料放上到作业平台4上,所述推拉式双开门52上装有接近开关53,所述推拉式双开门52未关好时,作业平台4无法启动上升下降,避免了安全隐患。
本实施例的顶棚50采用复合材料,轻巧结实且防雨,所述顶棚50 为装配式可打开结构,当使用吊机吊挂大件或长件进平台时,可打开所述顶棚50,方便物料进入作业平台4内部,大大增加可运输物料的尺寸。顶棚打开处有密封条54,可防雨水冲刷进入作业平台4里。所述顶棚50带有伸缩架体,可通过拉出伸缩架延伸顶棚以更贴近建筑墙体,起到更好的防护作用。所述顶棚50与所述护栏5装配式连接在一起。所述顶棚50端部预留机器人用一体式组合导轨安装孔,可安装巡检机器人81导轨和滑触线8。作业平台4上的内立杆55起加强支承顶棚50作用,所述内立杆55可拆除。
参照图9所示,本实施例的附墙架6由焊接框架60、扣件61、附墙杆62、穿墙膨胀螺栓63组成,所述附墙架6连接在两个标准节立柱 2之间,所述附墙杆62使用扣件61连接附墙框和标准节立柱2通过穿墙膨胀螺栓63附着在建筑体上,附墙杆安装夹角在30°-55°之间。
参照图8所示,本实施例的凸出模块40为选配模块,所述凸出模块40与驱动模块3相连接,增加凸出模块40可方便机器人通过立柱处,同时方便到达第二级作业平台4,在二级凸出模块40中设置了伸缩爬梯49,要去往第二级作业平台4的施工人员可打开人孔翻板47,通过人孔和伸缩爬梯49进出上一级作业平台4。一级凸出模块40设置了门48,地面的人员要通过地面的爬梯45走到一级凸出模块40处,关好门48,将伸缩爬梯49降下来。所述凸出模块40处配有可装拆的小型吊机46,可用于标准节立柱2的等加高时的吊装,平常使用时,可吊装一些轻型物料到作业平台4里,吊杆可360度旋转,方便的将物料吊起旋转到作业平台4里面,大大节省人力搬运,也可节省叉车运送的时间。
小型吊机46还可以装拆到作业平台4的其它位置,当放在作业平台4内部时,可用做外墙装修是使用,安装玻璃幕墙的干挂件时,可将小型吊机46放在作业平台4离墙近处,在作业平台4与墙面的间隙处将沉重的干挂件直接起吊到安装的相对应处,工人无需搬运和抬起沉重的干挂件,只需要将干挂件对准位置连接螺栓固定即可,大大节省了安装时间,通过此操作安装,比平常安装时间缩短至少5倍。
本实施例的风速仪51安装在作业平台4两端的顶棚50上,24小时监测风力风载,当风速超过设定值时,监测控制系统禁止作业平台4 升降作业。
参照图10所示,本实施例的防护网22为铝合金材质网框,在作业平台4上的标准节立柱2处设立了防护网22,所述防护网22两侧设置门,可以通过打开门将建筑垃圾倒到废料管道7里,需要维修标准节立柱2处的电气元件时,可以卸下安装螺栓将整个防护网22打开。
实施例4
本实施例,参照图10所示,在标准节立柱2处中间处安装了快速直通废料管道7,作业平台4上的垃圾、建筑废料等可在任意楼层里通过打开防护网22的门,将垃圾倒进废料管道7的开口,即可直接通到地面的废料收纳车70里,大大节省了平常工人清理高层建筑废料的时间和人力成本,而且容易做到无扬尘等清洁施工。尤其在一百多米高层建筑,需要运送废料垃圾极为麻烦和费时,有了直通的废料管道7,各个楼层能快速将垃圾直接输送到地面的废料收纳车70里。所述废料管道7为1.508米标准节装配而成,每个标准节开口处可交错式安装,标准节立柱2两侧的作业平台4上的垃圾,均可通过管道开口处丢弃,废料管道7通过与标准节立柱2连接,共同附墙固定。
本实施例的电控箱410采用摇杆操作控制作业平台4升降,摇杆手柄操作升降,可灵活微调作业平台上升下降,以更好到达目标楼层,电控箱410设有漏电保护装置。
本实施例的安全监测控制系统除了智能监测每个模块之外,控制系统具有作业平台4自动调平功能,带有语音播报报警信息功能,在所述电控箱410的屏幕上显示报警信息,让现场施工人员清晰明了知道哪个部件出现问题,终端的管理中心平台实时同步报警信息。所述控制系统还可根据客户需求添加配置,如增加变频器可调节作业平台4 的升降速度。
本实施例的两级作业平台4之间采用4G通讯模块保持连接通讯,将即时数据和实时监控信息传达到管理中心平台,所述4G通讯模块即时收集统计数据和实时监控信息能24小时连续不断平稳传送,实现高速联网通讯,达到数据交互和远程控制的作用。
管理人员通过终端的管理中心平台通过4G通讯模块发送指令到电控箱410来执行相应任务。使管理人员根据所述管理中心平台远程作信息化、数字化处理。
本实施例的控制系统在联网交互控制情况下增加有无线通讯模块,移动终端设备如:手机、平板电脑可接入现场施工控制系统的无线通讯模块,通过局域网的连接保障通讯的实时性和可靠性,同时解决了施工现场可能信号较差的影响,保障施工正常可靠运行。
本实施例的附着式电动施工平台连接有不间断电源UPS,所述UPS 作为选配模块,除了电源稳压外,当出现停电时UPS能作为备用电源供设备作应急作用,避免出现突然停电设备停在半空的情况发生。
本实施例在作业平台4上可安装巡检机器人81,所述顶棚50内侧靠近墙面处预留安装孔,可安装所述巡检机器人81的吊装导轨83,吊装导轨83与巡检机器人81供电用滑触线8并排安装,吊装导轨83和滑触线8为1米和1.5米两种规格,可随平台标准节的长度任意装配总长度,巡检机器人81的拖曳式集电器80通过与滑触线8连接供电,所述巡检机器人81带有高清摄像机和红外热成像摄像机,实时监控现场的画面、声音、温度、烟雾、气体数据,并将监控画面和信息呈现到管理中心平台,
本实施例的巡检机器人81带有探照灯,在黑暗里为监控提供足够光线,管理人员通过终端的管理中心平台远程操控高清摄像机和探照灯照射方向,360度全方位实时监控施工现场,也可以远程操控所述巡检机器人到达作业平台每个区域,监控作业平台和施工楼层的现场情况,解决了管理人员对目前环境复杂的施工现场一无所知的问题,可及时发现问题避免问题扩大化,同时管理人员通过监控画面了解现场施工进度,根据需要作出相应调整措施。
实施例5
本实施例公开附着式电动施工平台融合自走式外墙作业机器人9 施工,参照图12所示,所述自走式外墙作业机器人9,为可更换末端执行器的自走式多功能外墙作业机器人,所述自走式多功能外墙作业机器人无需规划路线,可在作业平台4上自主行走,且具有避障功能,利用附着式电动施工平台的升降功能,可在相应墙面作整面墙体的施工作业,所述自走式外墙作业机器人9通过拖曳式集电器80与滑触线 8连接供电,所述拖曳式集电器80不受机器人行走路径约束,也不受滑触线形状影响,始终保持与所述滑触线8良好连接。
参照图11所示,本实施例的滑触线8安装在所述顶棚50离墙端部处,在两个立柱阻挡处,绕过标准节立柱2安装在防护网22的框架上,使所述自走式外墙作业机器人9可顺利绕过立柱处到达作业平台4 另一侧,在整个作业平台4内可自由行走。
本实施例的自走式外墙作业机器人9带有GPS定位,可通过终端的手机或平板电脑上管理中心平台上的机器人三维模型,实时看到机器人的具体位置。
本实施例的自走式外墙作业机器人9带有机械臂,可伸展到标准节立柱附墙处作各种如打磨、清洗或喷涂作业。
本实施例的自走式外墙作业机器人9装上打磨头时即变成自走式打磨机器人91,所述自走式打磨机器人91通过激光检测墙面平整度,反馈到管理中心平台里,操作人员可通过终端远程控制自走式打磨机器人91打磨墙面作业,末端执行器的打磨头带有力感传感器,打磨后的墙面通过激光传感器反馈到管理中心平台上,所述管理中心平台可通过远程控制所述自走式打磨机器人91的速度和打磨精度等,施工人员可现场或通过管理中心平台远程根据需求和进度控制操作打磨机器人作业。如果施工期紧急,作业平台4上还可以放多台自走式打磨机器人91同时作业,互不干扰。
本实施例的自走式外墙作业机器人9更换末端执行器变成自走式清洗机器人92,所述自走式清洗机器人92自带水箱和高压水枪,采用水循环的清洁模式,可快速将墙面附着的灰尘冲刷干净的同时将清洁用水循环利用,清洁机器人水循环系统有过滤清洁功能,将污水过滤净化后循环利用。
本实施例的自走式外墙作业机器人9末端执行器更换为喷涂头,接上喷料桶,就变成自走式喷涂机器人93,所述自走式喷涂机器人93 在作业平台4上行走和喷涂,激光传感器同样可检测到墙的喷涂漆面厚度和喷涂效果,施工人员和管理人员可通过现场或者管理中心平台调整机器人的各种参数来实现喷涂的最佳效果。
参照图13所示,附着式电动施工平台融合导轨式外墙作业机器人 82施工,所述导轨式外墙作业机器人82通过安装在作业平台4上的可装拆导轨83行走,所述导轨可选择装在作业平台4离墙近端和远端,
当所述导轨式外墙作业机器人82装在作业平台4离墙近端时,采用导轨83加外支撑轮的方式保持机器人自身平衡。
当所述导轨式外墙作业机器人82装在作业平台4离墙远端时,采用上下导轨的夹持形式来保持机器人的平衡,所述导轨式外墙作业机器人82同样可更换末端执行器进行各式外墙施工作业,当装上打磨头时作为打磨机器人为外墙打磨墙面,当装上水箱和高压水枪时,作为清洁机器人作外墙清洗作业,当装上喷涂头、接上喷料桶时,作为喷涂机器人作墙面喷漆作业,所述导轨式外墙作业机器人82具有避障功能,利用附着式电动施工平台的升降功能,可在相应墙面作整面墙体的施工作业,所述导轨式外墙作业机器人82通过拖曳式集电器80与滑触线8连接供电。
本实施例的所述导轨式外墙作业机器人82带有GPS定位,在远程的管理中心平台可实时看到机器人的具体位置。
本实施例的导轨式外墙作业机器人82带有机械臂,可伸展到标准节立柱附墙处打磨、清洗和喷涂作业。
本实施例的外墙作业机器人执行墙面施工作业前,机器人扫描墙面轮廓到管理中心平台,所述管理中心平台通过指定路线把位置坐标反馈到作业机器人,从定好的原点开始作业到指定地点完成,实现了自动化、智能化施工作业。
本实施例的附着式电动施工平台结合外墙作业机器人,基于BIM 技术建立整个系统全方位的三维模型管理中心平台的整套施工系统,可应用在装配式结构建筑施工,所述整套施工系统可大大增加装配式结构施工进度,利用上级作业平台供工人作浇筑等作业,下级作业平台供运送物料以及外墙施工作业,大大减少了装配式结构的施工难度,同时大大加快施工进度。
实施例6
本实施例公开一种基于BIM的施工平台与机器人系统的使用,底座结构以及自带扳手可调支腿结构。底座带有水平传感器监测地基的水平度,一旦出现轻微下沉或塌陷等,设备立即停止运行。
标准节立柱安装有倾角传感器实时监测立柱受力变形和垂直度。
附着式电动施工平台采用防水滑触线提供设备电源。
驱动模块带有片式压力传感器,监测系统将压力传感器采集到数据控制驱动模块上的物料重量,使设备承载不超过额定值。
一体式平台标准节结构,结合平台梁标准节和脚手板。伸缩梁端部带有挂件位,上级作业平台可将幕墙干挂钢架放在挂件上。
作业平台带密封条防水顶棚,顶棚可开合,带有伸缩架体,当设备离墙远时,可增加伸缩顶棚板。作业平台的顶棚两端装有风速监测仪。当风速风压过载时禁止运行设备。
凸出模块和结合小型吊机,可将标准节立柱起吊到相应位置方便组装。可移动到作业平台内部,在作业平台与离墙面的间隙吊装幕墙干挂件。
上级凸出模块带有伸缩爬梯,通过打开人孔翻板进出上级作业平台。
双重监测保证安全,两级作业平台带有接近开关控制安全距离,增加雷达监测两级之间距离,下级作业平台的雷达监测到地面距离。
作业平台带有实时监测受力变形的位移传感器、水平传感器、重力传感器、风力风压监测仪。作业平台与驱动模块采用销轴重力传感器相连,销轴重力传感器相当于一杆称,监控系统采集数据控制作业平台的载重。
附着式电动施工平台结合废料直通管道,任意楼层可将垃圾丢到废料管道里,直通到地面处的废料收纳车里,大大节省了工人清理建筑垃圾的人力物力和时间。
防护网为两侧可打开门结构,当需要使用废料快速输送管道时,可打开侧门将废料、垃圾倒进废料管道入口处。
附着式电动施工平台连接有不间断电源UPS,除了电源稳压外,当出现停电时UPS能作为电源供设备作应急作用。
两级作业平台之间采用4G通讯模块保持连接,将即时数据和实时监控信息传达到管理中心平台,所述控制系统在联网交互控制情况下增加有无线通讯模块,移动终端设备如:手机、平板电脑等可接入现场施工控制系统的无线通讯模块。
附着式电动施工平台采用模块化装配设计,监测传感器、废料输送管道、4G模块、建筑机器人、BIM管理中心平台均为可选配模块,可根据施工需要酌情选配适用模块。
附着式电动施工平台融合建筑机器人,解决了劳动力短缺,人工成本高昂,施工难度大,生产效率低,高空作业危险性高等问题。
外墙作业机器人通过拖曳式集电器与滑触线连接供电,在两个立柱阻挡处,绕过标准节立柱2安装在防护网22的框架上,所述自走式外墙作业机器人9可顺利绕过立柱处到达作业平台4另一侧。
多功能的外墙作业建筑机器人可解决多种施工类别,只需要更换末端执行器就可施工作业不同工种。
基于BIM技术构建全方位三维模型监测整个施工系统的管理中心平台。通过连接各个传感器实时监测整个附着式电动施工平台设备的受力数据,机器人实时反馈数据到管理中心平台,建筑体状况可视化监控,可远程通过管理中心平台系统作设备管理、生产管理、数据管理。形成附着式电动施工平台+建筑机器人+安全监测控制系统+基于 BIM技术构建的管理中心平台的整套施工体系。
本发明中,附着式电动施工平台结合的巡检机器人、打磨机器人、清洗机器人和喷涂机器人为本专利优选方案,其它的机器人结合附着式电动施工平台均为本发明可替代方案,均在本发明保护范围之内。
本发明中,废料管道结构以及安置在标准节立柱内为本发明优选方案,但并不限于此结构以及安装位置,附着式电动施工平台结合废料直通管道均在本专利保护范围内。
本发明中,附着式电动施工平台中每个模块用的监测传感器可用其它能实现同样功能的传感器或监测器替代。如底座的水平传感器可用倾角传感器、倾斜仪或位移传感器等替代,作业平台标准节之间的位移传感器可用力感传感器、拉力传感器替代。
本发明中,附着式电动施工平台设备中的两级作业平台4之间凸出模块结合伸缩爬梯为本发明实施方案,可伸缩云梯+爬台、上下级连接平台结构均为可替代方案。
本发明中,两级作业平台4之间采用雷达37监测为本发明实施方案,可采用其它测距传感器、接近开关替代,均在本发明保护范围内。
本发明中,附着式电动施工平台设备采用4G模块通讯为本发明实施方案,包括但不仅限于工业路由器、5G通讯模块。
本发明中,导轨式外墙作业机器人82的导轨及安装固定形式包括但不仅限于实例中,其余导轨与机器人的导轨固定形式均在保护范围之内。
本发明中,附着式电动施工平台结合的建筑机器人采用防水滑触线和拖曳式集电器的方案供电,可采用电池、电缆供电的方案替代本发明实例。
本发明中,整套施工系统包括附着式电动施工平台+建筑机器人+ 安全监测系统+基于BIM管理中心平台施工对象不仅是楼房建筑体,包括但不限于异性建筑结构体、场馆、桥梁、烟囱、水电站。
本发明是由全新研发设计的附着式电动施工平台结合建筑机器人的智能设备,并采用基于BIM技术的远程监控管理中心平台,为一整套施工系统。附着式电动施工平台从施工需求、施工安全、施工工艺等全新研发,每个模块安装有传感器,实时将平台的每一处受力变形、位移信息传达到远程终端监控管理中心平台的三维模型上,附着式电动施工平台提供机器人自动化施工作业,巡检机器人可24小时监测平台上所有角落,并可通过终端可视化控制巡检机器人快速到达平台上指定区域。打磨机器人通过激光雷达实时呈现打磨前的墙面,施工人员或管理人员可通过现场或远程管理中心平台操控打磨机器人作业,打磨机器人打磨后墙面平整度实时反馈到可视化终端上。打磨机器人打磨完墙面可通过更换机器人的末端执行器,变成清洗机器人和喷涂机器人,同样,清洗和喷涂机器人也能实时将数据传达到控制中心,远程可视化监测和操控建筑机器人。整套施工系统实现基于BIM在终端可视化物联网远程智能监测以及操作,整套施工系统包括附着式电动施工平台+建筑机器人+安全监测系统+基于BIM技术构建的管理中心平台。
综上,本发明的管理中心平台为基于BIM技术建立整套施工系统全方位的三维模型的管理中心平台,可360度实时监控和观察现场建设情况,远程控制附着式电动施工平台和建筑机器人,加强了项目公司与施工单位的深层次互动的同时,实现基于BIM技术的施工项目科学化、规范化、智能化管理,更加快了整个工程推进速度。
建筑机器人的不断推陈出新,机器人技术逐渐成熟,而附着式电动施工平台作为建筑机器人的载体,建筑机器人解决工人难以施工的诸多难题,同时大大提高效率。人机结合减少日益高昂的人工,最重要的是解决了大量高空作业的施工危险问题,机器人作业的施工效果更远远超越工人作业。基于BIM技术建立整个系统全方位三维模型的管理中心平台,实时监测和控制现场建设情况,将现场施工情况和设备参数信息整合起来,使管理者实时掌握设备和施工现场的真实状态,实现基于BIM技术的施工项目自动化、智能化、信息化管理。
本发明的附着式电动施工平台每个模块安装有传感器,实时监测系统将数据传达到管理中心平台,智能监控整个施工设备与现场,保障了设备的安全,每个部件的实时监测,将危险性将到最低,防范于未然,整个系统基于BIM技术将现场实物建立成全方位的三维模型,在管理中心平台实时监测和控制设备,可最大化利用附着式电动施工平台结合建筑机器人作不同工种的作业,建筑机器人可以与工人同时施工作业,互不干扰影响,实现人机结合,减少人工作业,提高施工质量,大大提高设备的使用率以及施工效率,基于BIM技术构建的管理中心平台可更科学化、智能化管理现场整个施工系统。
本发明的外墙作业打磨、清洗和喷涂若没有附着式电动施工平台作为承载体,在高层建筑只能通过吊篮方式安装,吊篮方式存在多种安全隐患,同时难以作施工难度大的外墙作业,采用附着式电动施工平台结合外墙作业机器人的方式解决了众多施工难题,以及保障了施工安全。
本发明将建筑废料快速输送管道结合到附着式电动施工平台里,不仅解决了高层清理大量建筑废料的难题,而且减少了大量的清理垃圾时间,大大节约人力成本,将建筑废料管道放到标准节立柱里,同时不影响升降平台的结构,甚至不占用设备空间,合理的利用了标准节立柱中空位置的剩余空间,为规范化作业、智能化施工、机器人作业提供极大便利。
本发明采用防水滑触线和集电器提供设备电源,解决了一般附着式电动施工平台的电缆不好管理以及容易出现纠缠甚至卷扬机卡位电缆被拉断的情况,同时解决了两级平台间电缆的缠绕和打结,以及电缆过长不好管理等问题。
本发明的附着式电动施工平台融合的巡检机器人和多功能外墙作业机器人真正实现人机结合,附着式电动施工平台作为众多建筑机器人的载体,可应用多种机器人施工作业,机器人不仅限于外墙作业施工,自走式作业机器人可通过附着式电动施工平台进入到建筑物里作内部装修施工作业。
本发明基于BIM技术建立整个系统全方位的实景三维模型的管理中心平台,可360度实时监控和观察现场建设情况,将现场施工情况和设备参数信息整合起来,使管理者实时掌握设备的真实状态、实际施工情况及运营维护相关资料,加强项目公司与施工单位的深层次互动,实现基于BIM技术的施工项目科学化、规范化、智能化管理,同时加快整个工程推进速度。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 基于BIM的施工平台与机器人系统
- 一种基于BIM与测量机器人的桥梁工程施工自动化测量系统及方法