一种动态告警窗的告警控制方法
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及图像识别技术领域,尤其涉及一种动态告警窗的告警控制方法。
背景技术
卷积神经网络识别技术在图像识别,生物医学技术,工业生产等领域起着重要作用。动态告警窗是为了能够准确进行告警而设置的,因此就需要基于卷积神经网络的图像识别技术实现更加实时有效的告警。
因此针对这一现状,迫切需要设计和生产一种基于卷积神经网络的图像识别技术在动态告警窗中的应用,以满足实际使用的需要。
发明内容
本发明所要解决的技术问题在于,提供一种动态告警窗的告警控制方法,以实现更加实时有效的告警。
为了解决上述技术问题,本发明实施例提供一种动态告警窗的告警控制方法,包括:
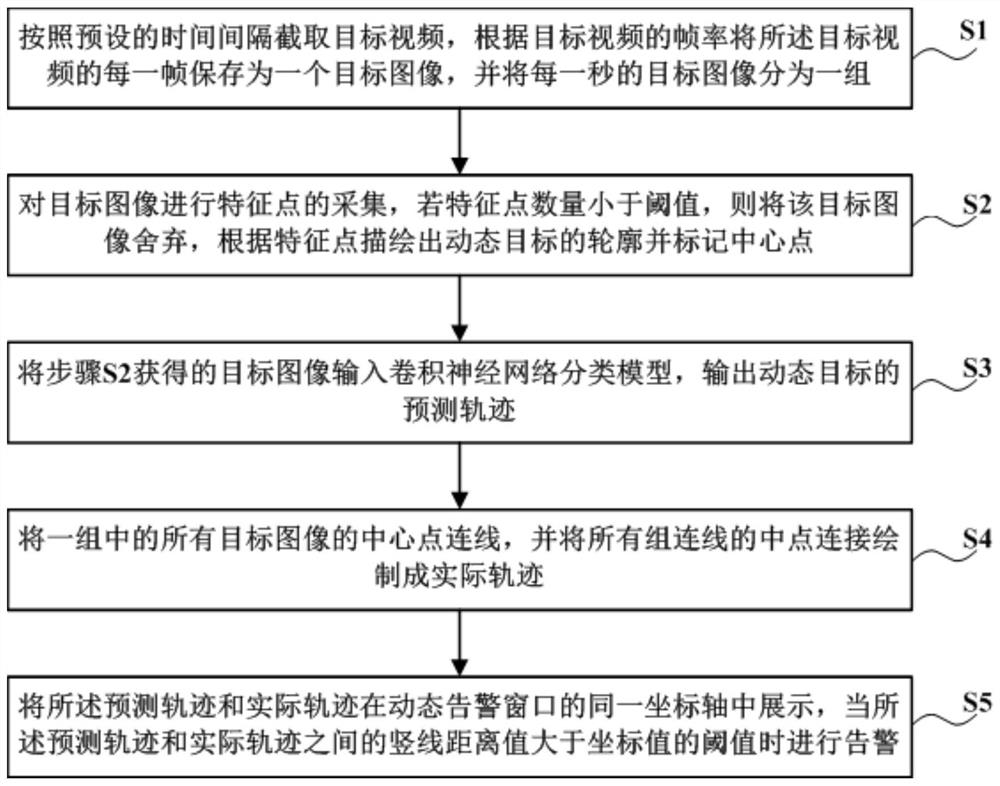
步骤S1,按照预设的时间间隔截取目标视频,根据目标视频的帧率将所述目标视频的每一帧保存为一个目标图像,并将每一秒的目标图像分为一组;
步骤S2,对目标图像进行特征点的采集,若特征点数量小于阈值,则将该目标图像舍弃,根据特征点描绘出动态目标的轮廓并标记中心点;
步骤S3,将步骤S2获得的目标图像输入卷积神经网络分类模型,输出动态目标的预测轨迹;
步骤S4,将一组中的所有目标图像的中心点连线,并将所有组连线的中点连接绘制成实际轨迹;
步骤S5,将所述预测轨迹和实际轨迹在动态告警窗口的同一坐标轴中展示,当所述预测轨迹和实际轨迹之间的竖线距离值大于坐标值的阈值时进行告警。
进一步地,所述卷积神经网络分类模型依次包括输入层、第一卷积层、第一修正线性单元ReLU层、第一池化层、第二卷积层、第二ReLU层、第二池化层、全连接层和输出层,所述步骤S3具体包括:
在第一卷积层中,将所述目标图像通过卷积核进行卷积,进行补零之后得到第一二维特征图;
在第一ReLU层中,采用ReLU函数对第一二维特征图进行非线性映射,得到第二二维特征图;
在第一池化层中,将第二二维特征图经过最大池化,得到第三二维特征图;
在第二卷积层中,将第三二维特征图通过卷积核进行卷积,补零之后得到第四二维特征图;
在第二ReLU层中,采用ReLU函数对第四二维特征图进行非线性映射,得到第五二维特征图;
在第二池化层中,将第五二维特征图经过最大池化,得到第六二维特征图;
在全连接层中,将第六二维特征图转换为1000维的特征向量V;
在输出层,利用相应函数归一化所述特征向量V,得到特征向量S;
根据特征向量S绘制动态目标的预测轨迹。
进一步地,所述步骤S5具体包括:
将预测轨迹和实际轨迹在动态告警窗口的同一坐标轴中展示,并将起点设置为相同,每隔1s绘制一道竖线,当预测轨迹和实际轨迹之间的竖线距离值大于坐标值的阈值时则进行告警。
进一步地,所述动态告警窗的告警控制方法还包括:
步骤S6,将同一动态目标的预测轨迹L1和L2所在的坐标轴图像打上标签并保存到服务器中。
进一步地,特征点数量的阈值为8。
进一步地,目标图像为128*128的位图。
进一步地,所述卷积核的参数为3*3。
进一步地,最大池化的参数为2*2。
进一步地,所述相应函数为Sigmoid函数。
进一步地,所述预测轨迹和实际轨迹在坐标轴的起点设置为(0,0)。
本发明实施例的有益效果在于:本发明采用基于卷积神经网络的图像识别技术,通过建立相应的分类模型并利用KCF算法进行计算,再通过Sigmoid函数归一化能够高效的得出直观简洁的预测轨迹,与实际轨迹进行比对,实际轨迹的绘制间隔为一帧,比对的间隔为1s,得到的结构更加准确且具有实时性;能够更快速准确地进行告警响应。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例一种动态告警窗的告警控制方法的流程示意图。
图2是动态目标的预测轨迹和实际轨迹的对比曲线图。
具体实施方式
以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。
请参照图1所示,本发明实施例提供一种动态告警窗的告警控制方法,包括:
步骤S1,按照预设的时间间隔截取目标视频,根据目标视频的帧率将所述目标视频的每一帧保存为一个目标图像,并将每一秒的目标图像分为一组;
步骤S2,对目标图像进行特征点的采集,若特征点数量小于阈值,则将该目标图像舍弃,根据特征点描绘出动态目标的轮廓并标记中心点;
步骤S3,将步骤S2获得的目标图像输入卷积神经网络分类模型,输出动态目标的预测轨迹;
步骤S4,将一组中的所有目标图像的中心点连线,并将所有组连线的中点连接绘制成实际轨迹;
步骤S5,将所述预测轨迹和实际轨迹在动态告警窗口的同一坐标轴中展示,当所述预测轨迹和实际轨迹之间的竖线距离值大于坐标值的阈值时进行告警。
具体地,步骤S1中截取目标视频的预设的时间间隔为6s,这样标准24帧的目标视频可以获得144组目标图像,能够画出足够精确的实际轨迹。
步骤S2中,特征点数量的阈值为8,这样,在相对精确地描出动态目标的轮廓的同时,可以减小采集量。作为一种示例,目标图像为128*128的位图,相对256*256的位图,在保证目标图像相对清晰的情况下可以减少计算量。
步骤S2对目标图像进行预处理后,步骤S3将预处理后的前三组目标图像输入卷积神经网络分类模型。本实施例中,卷积神经网络分类模型依次包括输入层、第一卷积层、第一修正线性单元ReLU(Rectified Linear Unit)层、第一池化层、第二卷积层、第二ReLU层、第二池化层、全连接层和输出层。预处理后的前三组目标图像输入卷积神经网络分类模型中的第一卷积层,通过核相关滤波KCF(Kernel Correlation Filter)算法进行计算。
在第一卷积层中,将目标图像通过卷积核进行卷积,进行补零之后得到第一二维特征图;所述卷积核的参数为3*3,可以使卷积后的二维特征图较为平滑;
在第一ReLU层中,采用ReLU函数对第一二维特征图进行非线性映射,得到第二二维特征图;
在第一池化层中,将第二二维特征图经过最大池化,得到第三二维特征图;最大池化的参数为2*2,可以去除冗余信息、对特征进行压缩、简化网络复杂度、减少计算量;
在第二卷积层中,将第三二维特征图通过卷积核进行卷积,补零之后得到第四二维特征图;
在第二ReLU层中,采用ReLU函数对第四二维特征图进行非线性映射,得到第五二维特征图;
在第二池化层中,将第五二维特征图经过最大池化,得到第六二维特征图;
在全连接层中,将第六二维特征图转换为1000维的特征向量V;
在输出层,利用相应函数归一化所述特征向量V,得到特征向量S;作为一种示例,相应函数为Sigmoid函数,Sigmoid函数的输出映射在(0,1)之间单调连续,便于进行比对;
根据特征向量S绘制动态目标的预测轨迹L1。
步骤S4进行实际轨迹计算:将一组中的所有中心点进行连线,然后将所有组连线的中点连接绘制成实际轨迹L2。
请结合图2所示,步骤S5将预测轨迹L1和实际轨迹L2在动态告警窗口的同一坐标轴中展示,并将起点设置为相同,每隔1s绘制一道竖线,将预测轨迹L1和实际轨迹L2之间的竖线距离值设为d,当d大于坐标值的阈值时则进行告警。预测轨迹L1和实际轨迹L2在坐标轴的起点设置为(0,0),便于进行直观的观察。
本实施例还包括动态保存步骤:步骤S6,将同一动态目标的预测轨迹L1和L2所在的坐标轴图像打上标签并保存到服务器中。
综上所述,相比于现有技术,本发明实施例带来的有益效果在于:本发明采用基于卷积神经网络的图像识别技术,通过建立相应的分类模型并利用KCF算法进行计算,再通过Sigmoid函数归一化能够高效的得出直观简洁的预测轨迹,与实际轨迹进行比对,实际轨迹的绘制间隔为一帧,比对的间隔为1s,得到的结构更加准确且具有实时性;能够更快速准确地进行告警响应。
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 一种动态告警窗的告警控制方法
- 一种基于服务器硬件告警的动态CSS控制方法和控制系统