自助翻台机器人及自助翻台方法
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及机器人技术领域,具体地说是自助翻台机器人及自助翻台方法。
背景技术
一般情况下,餐厅翻台率需达到300%左右才能保证盈利,自助餐厅在客流量高峰期很可能因为翻台不够及时导致客人流失,因此,自助餐厅盈利的最主要途径就时是提高餐厅的翻台率。对于自助餐厅来说,翻台清理桌面需要投入大幅度人手,极大地增加了人工成本,同时高峰期时不能及时清理餐余送回后厨,也降低了自助餐厅的翻台率。
如何提高餐厅翻台率且降低人力成本,是需要解决的技术问题。
发明内容
本发明的技术任务是针对以上不足,提供自助翻台机器人及自助翻台方法,来解决餐厅翻台率低且人力成本高的技术问题。
第一方面,本发明提供自助翻台机器人,包括行走机器人本体,所述行走机器人本体上配置有:
通信系统,所述通信系统支持无线通信模式,用于提供机器人本体与远端控制中心的无线连接;
本地控制器,所述本地控制器与所述通信系统电连接;
路径导航系统,所述路径导航系统包括激光雷达、摄像头和路径规划模块,所述激光雷达用于扫描餐厅平面图,所述摄像头用户获取环境图像,所述路径规划模块与上述激光雷达和摄像头电连接,用于基于餐厅平面图进行建图,得到餐厅平面图并确定餐厅内供机器人本体行走的可行走区域,用于基于餐厅平面图以及环境图像对机器人本体进行定位得到机器人本体的实时坐标,并用于基于餐厅平面图、可行走区域以及实时坐标规划机器人本体的行走路径,所述行走路径途径所有餐桌;
感应系统,所述感应系统包括红外传感器和语音识别模块,所述红外传感器与本地控制器电连接,用于感知感应区内的唤醒动作,所述语音识别模块与本地控制器电连接,用于感知唤醒语音,所述唤醒动作和唤醒语音通过控制器调控机器人本体行走至目的地并停留等待预定时间;
托盘,所述托盘用于放置物品。
作为优选,所述行走机器人本体上还配置有:
重力传感器,所述重力传感器设置于托盘上,并与本地传感器电连接,用于检测托盘上放置物品的重量,托盘上放置物品的重量超出预定重量阈值后,所述本地机器人调控所述机器人本体不再在后续的路径中停留,直接返回厨房。
作为优选,所述机器人本体上配置有:
语音模块,所述语音模块包括麦克风和音箱,所述麦克风和音箱均与本地控制器电连接,用于通过语音播报的方式提醒阻碍机器人本体行走的客人让行。
作为优选,托盘上放置物品的重量超出预定重量阈值后,所述语音模块用于通过语音播报的方式提醒客户托盘超重。
作为优选,所述路径规划模块通过Cartographer算法计算机器人的定位并建图。
作为优选,所述路径规划模块通过DWA导航算法进行路径规划。
作为优选,所述本地控制器用于调控所述机器人本体沿着行走路径行走,并沿着行走路径经过所有餐桌一次。
第二方面,本发明提供自助翻台方法,通过如第一方面任一项所述的自助翻台机器人协助客人收拾餐台,所述方法包括:
机器人本体沿着行走路径行走,且沿着行走路径行走时必须经过所有餐桌一次;
机器人本体行走途中,感应到语音唤醒或动作唤醒后,行走至目的地并停留预定时间,等待客户将物品放到托盘上;
机器人本体沿着行走路径继续行走并最终行走至后厨,停留预定时间托盘清空后,沿着行走路径开设下一轮。
作为优选,托盘上放置物品的重量超出预定重量阈值后,所述机器人本体不再在后续的路径中停留,直接返回厨房。
作为优选,通过语音播报的方式提醒阻碍机器人本体行走的客人让行;
通过语音播报的方式提醒客人托盘中放置的物品超重。
本发明的自助翻台机器人及自助翻台方法具有以下优点:当翻台机器人途径餐桌时,客人可以语音唤醒机器人在桌前等待60秒,再将食物残渣和使用过的餐具放到机器人的托盘中即可,将人工收拾餐台的模式,升级为客人自助收拾餐台,翻台服务机器人能够取代在自助餐厅巡视收拾餐桌的人员,节省人力成本,提高餐厅的接待能力,提高翻台率。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
下面结合附图对本发明进一步说明。
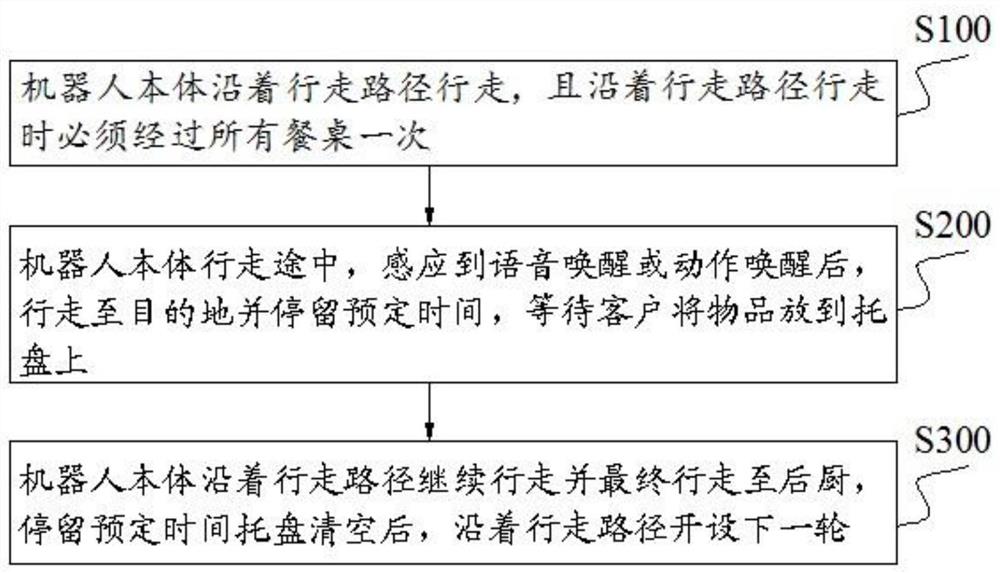
图1为实施例1自助翻台方法的流程框图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定,在不冲突的情况下,本发明实施例以及实施例中的技术特征可以相互结合。
本发明实施例提供自助翻台机器人及自助翻台方法,用于解决如何解决餐厅翻台率低且人力成本高的技术问题。
实施例1:
本发明的自助翻台机器人,包括行走机器人本体,行走机器人本体上配置有通信系统、本地控制器、路径导航系统、感应系统以及托盘,通信系统支持无线通信模式,用于提供机器人本体与远端控制中心的无线连接;本地控制器与所述通信系统电连接;路径导航系统包括激光雷达、摄像头和路径规划模块,激光雷达用于扫描餐厅平面图,摄像头用户获取环境图像,路径规划模块与上述激光雷达和摄像头电连接,用于基于餐厅平面图进行建图,得到餐厅平面图并确定餐厅内供机器人本体行走的可行走区域,用于基于餐厅平面图以及环境图像对机器人本体进行定位得到机器人本体的实时坐标,并用于基于餐厅平面图、可行走区域以及实时坐标规划机器人本体的行走路径,行走路径途径所有餐桌;感应系统包括红外传感器和语音识别模块,红外传感器与本地控制器电连接,用于感知感应区内的唤醒动作,语音识别模块与本地控制器电连接,用于感知唤醒语音,唤醒动作和唤醒语音通过控制器调控机器人本体行走至目的地并停留等待预定时间;托盘用于放置物品。
路径规划模块通过Cartographer算法计算机器人的定位并建图。通过DWA导航算法进行路径规划。
该机器人的工作流程为:
(1)机器人本体沿着行走路径行走,且沿着行走路径行走时必须经过所有餐桌一次;
(2)机器人本体行走途中,感应到语音唤醒或动作唤醒后,行走至目的地并停留预定时间,等待客户将物品放到托盘上;
(3)机器人本体沿着行走路径继续行走并最终行走至后厨,停留预定时间托盘清空后,沿着行走路径开设下一轮。
本实施例中,行走机器人本体上还配置有重力传感器,重力传感器设置于托盘上,并与本地传感器电连接,用于检测托盘上放置物品的重量,托盘上放置物品的重量超出预定重量阈值后,本地机器人调控所述机器人本体不再在后续的路径中停留,直接返回厨房。
机器人本体上配置有语音模块,语音模块包括麦克风和音箱,麦克风和音箱均与本地控制器电连接,用于通过语音播报的方式提醒阻碍机器人本体行走的客人让行。托盘上放置物品的重量超出预定重量阈值后,语音模块用于通过语音播报的方式提醒客户托盘超重。
实施例2:
本发明的自助翻台方法,通过实施例1公开的自助翻台机器人协助客人收拾餐台,该方法包括如下步骤:
S100、机器人本体沿着行走路径行走,且沿着行走路径行走时必须经过所有餐桌一次;
S200、机器人本体行走途中,感应到语音唤醒或动作唤醒后,行走至目的地并停留预定时间,等待客户将物品放到托盘上;
S300、机器人本体沿着行走路径继续行走并最终行走至后厨,停留预定时间托盘清空后,沿着行走路径开设下一轮。
其中,托盘上放置物品的重量超出预定重量阈值后,机器人本体不再在后续的路径中停留,直接返回厨房。通过语音播报的方式提醒阻碍机器人本体行走的客人让行。通过语音播报的方式提醒客人托盘中放置的物品超重。
上文通过附图和优选实施例对本发明进行了详细展示和说明,然而本发明不限于这些已揭示的实施例,基与上述多个实施例本领域技术人员可以知晓,可以组合上述不同实施例中的代码审核手段得到本发明更多的实施例,这些实施例也在本发明的保护范围之内。
- 自助翻台机器人及自助翻台方法
- 双翻双工位上片台的大翻限位机构