一种基于检测依据的磁探仪探测宽度预报模型及求解方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及一种磁探仪探测宽度获知方法,具体涉及一种基于检测依据的磁探仪探测宽度预报模型及求解方法。
背景技术
目前磁探仪探测宽度是根据磁探仪设备的技术参数或者根据经典探测宽度预报模型得到。
根据经典探测宽度预报模型,假定磁探仪搭载平台高度固定,水下目标深度固定,只要水下目标与磁探仪的横向距离L小于战术搜索宽度(磁探仪探测水下目标的探测距离),就能发现水下目标。由水下目标磁场信号分析可知,在磁探仪搭载平台高度固定,水下目标深度固定,水下目标磁特性不变的条件下,磁探仪搭载平台沿不同的航向飞行时,水下目标磁异常信号大小就有明显的差异;而且水下目标沿不同的磁航向航行的条件下,其感应磁矩也有较大的变化;显然不同的信号特征条件下,探测宽度是不同的。可见影响磁探仪探测宽度的因素不仅仅是磁探仪本身传感器的性能,还受到环境噪声条件、水下目标特性、搭载平台运动特性等因素的影响。因此,不能以简单的定距准则作为实际的探测宽度,需要综合各个因素建立符合实际的计算模型才能得到准确的探测宽度的估计。
综上,在实际环境条件下,现有方法往往只能粗略的估算磁探仪的探测宽度,与真实的磁探仪探测宽度有较大差距,特别是经典探测宽度预报模型不能分析水下目标磁特性的变化、环境磁噪声变化以及平台特性等因素对磁探仪探测宽度的影响。
基于以上问题,综合考虑搭载平台、探测系统、环境、水下目标等方面的特性,建立可靠的磁探测宽度预报模型,分析不同因素对磁探仪探测宽度影响的需求非常迫切。
发明内容
为了克服现有方法因没有考虑水下目标磁特性的变化、环境磁噪声变化以及搭载平台特性等因素对磁探仪探测宽度的影响,从而导致获得的磁探仪探测宽度值与磁探仪真实探测宽度差距较大的问题,本发明借鉴搜索论中搜索器材扫描宽度的定义,引入概率分布的思想,提出基于水下目标信噪比检测依据的航空磁探测探测宽度计算模型以及求解方法,准确反映了各个影响因素变化对探测性能的影响,使得磁探仪探测宽度结果准确性显著提升。
本发明的技术解决方案是提供一种基于检测依据的磁探仪探测宽度预报模型,其特殊之处在于:
式中W
本发明还提供一种基于检测依据的磁探仪探测宽度求解方法,其特殊之处在于,包括以下步骤:
步骤1:确定相关参数信息;
步骤1.1:确定任务区域经纬度信息;
步骤1.2:设定坐标系OXYZ,确定水下目标信息与搭载平台信息;
水下目标信息包括水下目标磁特性参数与水下目标运动态势参数;其中水下目标磁特性参数包括水下目标吨位、水下目标材料特性信息、水下目标三轴方向的导磁系数与水下目标固定磁矩大小等;其中水下目标运动态势参数包括水下目标航向角、水下目标深度与水下目标航速等;
搭载平台信息包括搭载平台运动态势参数;其中搭载平台运动态势参数包括搭载平台飞行航向、飞行高度及飞行速度等;
步骤1.3:确定环境噪声方差
根据环境噪声采样,利用噪声模型统计环境噪声等级得到环境噪声方差
步骤2:根据步骤1.1确定的任务区域经纬度信息,结合国际地磁参考场IGRF计算模型计算地磁要素信息,其中地磁要素信息包括地磁场大小、磁偏角及磁倾角;
步骤3:根据步骤2获得的地磁要素信息及步骤1确定的水下目标磁特性参数,结合水下目标磁矩计算模型,计算得到OXYZ坐标系下的水下目标磁场,即计算水下目标磁矩三分量;
步骤4:设定搭载平台和水下目标直线运动相遇于CPA点(Closest Point ofApproach,即磁异常探测系统检测到水下目标信号强度最大的点)为水下目标与磁探仪航路最近距离点的横向距离L(横向距离即投影距离);
步骤5:根据水下目标固定磁矩、水下目标磁矩三分量、水下目标运动态势参数、搭载平台运动态势参数和设定的L值,结合式(2)即航空磁探潜信号模型,可得到CPA点采样信号B
式中,μ
步骤6、根据步骤5中的采样信号计算检测模型B,用于与检测阈值进行比较,判断磁异常信号是否存在:
步骤7、设定无磁异常信号时的虚警概率P
式中,
步骤8、根据步骤5的采样信号B
在有磁异常信号存在的条件下,
式中,
步骤9、重复步骤4至步骤8得到不同横距条件下的检测概率,结合探测宽度预报模型定义式(1),可计算磁探仪探测宽度。
进一步地,在步骤1.3中,磁探仪背景磁噪声为加性噪声,在完成搭载平台背景噪声补偿和海洋环境磁噪声等其它噪声处理之后,在搭载平台平稳飞行过程中,可以认为剩余噪声为高斯噪声,由于经过补偿过程去平均处理,因此环境磁噪声均值为0、方差
本发明的有益效果是:
与现有技术只根据磁探仪设备技术参数或根据经典探测宽度预报模型得到探测宽度相比,本发明综合国际地磁参考场(IGRF)计算模型、水下目标磁矩计算模型、航空磁探潜信号模型、噪声模型和检测模型,基于概率分布的思想和水下目标信噪比检测依据,建立航空磁探潜探测宽度预报模型,可综合不同环境噪声条件、水下目标特性、平台运动特性等因素,计算不同横距条件下的检测概率,结果更具准确性、可靠性、客观性。
附图说明
图1为二维平面中磁探仪探测场景示意图;
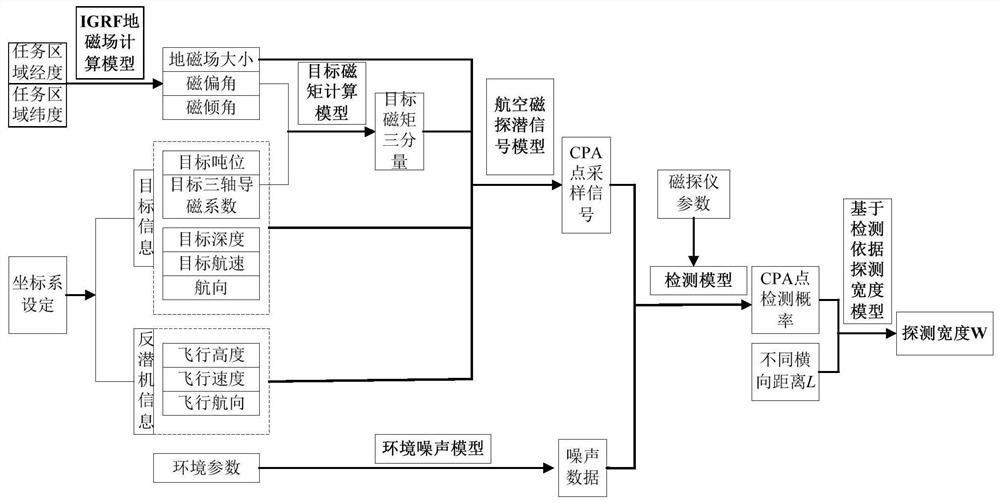
图2为磁探仪探测宽度求解框图;
图3为磁探仪探测场景示意图;
图4为搭载平台航向和水下目标航向变化时探测宽度;
图5为不同磁噪声等级,不同水下目标航向下探测宽度。
具体实施方式
本发明公开了一种基于概率分布的思想和水下目标信噪比检测依据的航空磁探仪探测宽度预报模型及求解方法。本发明分为两部分,基于检测依据的磁探仪探测宽度预报模型,和基于该宽度预报模型的探测宽度求解方法。
基于检测依据的磁探仪探测宽度预报模型建立:首先设定磁探仪探测高度、水下目标航行深度恒定;根据水下目标横距,即航空磁探仪与水下目标直线运动相遇点的横向距离,将沿水下目标横距运动轨迹探测到水下目标的概率设定为虚警概率条件下水下目标的检测概率;则磁探仪探测宽度预报模型可表示为水下目标检测概率在空间的累计,表示航空磁探仪的等效平均探测宽度。
探测宽度求解方法:根据经纬度信息,结合IGRF模型计算地磁要素信息;估计坐标系下的水下目标磁矩;设定搭载平台和水下目标横向距离,根据水下目标磁矩、水下目标运动态势信息、搭载平台运动态势信息和横向距离,结合航空磁探潜信号模型,估计采样信号;根据探测宽度预报模型的定义,用采样信号数据计算检测模型;根据设定的虚警概率,计算得到检测阈值;通过检测模型与检测阈值的比较判断水下目标磁异常信号是否存在;有磁异常信号时,根据设定虚警概率下的非中心分布卡方累积分布函数计算检测概率;从而计算横距条件下的检测概率。改变横距可得到不同横距条件下的检测概率,结合模型从而计算计算磁探仪探测宽度。改进了目前实际条件下通常智能粗略估算磁探仪的探测宽度的现状,本模型能准确反映各个影响因素变化对探测性能的影响,极大地提高了磁探仪探测宽度的准确性。
以下结合附图及具体实施例对本发明做进一步地描述。
设定搭载平台探测高度恒定、水下目标航行深度恒定,则磁探仪探测态势可以描述为二维平面坐标中的形式,如图1所示,L为磁探仪和水下目标直线运动相遇于CPA点的横向距离,称为该运动轨迹的水下目标横距。本实施例基于检测依据的磁探仪探测宽度预报模型可用式(1)表示:
式中W
由探测宽度计算模型的定义,结合航空磁探潜信号模型、国际地磁参考场(IGRF)计算模型、水下目标磁矩计算模型、环境噪声模型、检测模型,可以得到探测宽度预报模型的求解方法。结合图2,基本流程如下:
步骤1:确定相关参数信息;
步骤1.1:确定任务区域经纬度信息;
步骤1.2:设定坐标系OXYZ,确定水下目标信息与搭载平台信息;
水下目标信息包括水下目标磁特性参数与水下目标运动态势参数;其中水下目标磁特性参数包括水下目标吨位、水下目标材料特性信息、水下目标三轴方向的导磁系数与水下目标固定磁矩大小等;其中水下目标运动态势参数包括水下目标航向角、水下目标深度与水下目标航速等;
搭载平台信息包括搭载平台运动态势参数;其中搭载平台运动态势参数包括搭载平台飞行航向、飞行高度及飞行速度等;
步骤1.3:确定环境噪声方差
磁探仪背景磁噪声为加性噪声,在完成搭载平台背景噪声补偿和海洋环境磁噪声等其它噪声处理之后,在搭载平台平稳飞行过程中,可以认为剩余噪声为高斯噪声,由于经过补偿过程去平均处理,因此环境磁噪声均值为0、方差
步骤2:根据步骤1.1确定的任务区域经纬度信息,结合国际地磁参考场(IGRF)计算模型计算地磁要素信息,其中地磁要素信息包括地磁场大小、磁偏角及磁倾角;
步骤3:根据步骤2获得的地磁要素信息及步骤1确定的水下目标磁特性参数,结合水下目标磁矩计算模型,计算得到OXYZ坐标系下的水下目标磁场,即计算水下目标磁矩三分量;
步骤4:设定搭载平台和水下目标直线运动相遇于CPA点(Closest Point ofApproach,即磁异常探测系统检测到水下目标信号强度最大的点)为水下目标与磁探仪航路最近距离点的横向距离L(横向距离即投影距离);
步骤5:根据水下目标固定磁矩、水下目标磁矩三分量、水下目标运动态势参数、搭载平台运动态势参数和设定的L值,结合式(2)即航空磁探潜信号模型,可得到CPA点采样信号B
式中,μ
步骤6、根据步骤5中的采样信号计算检测模型B,用于与检测阈值进行比较,判断磁异常信号是否存在:
步骤7、设定无磁异常信号时的虚警概率P
式中,
步骤8、根据步骤5的采样信号B
在有磁异常信号存在的条件下,
式中,
步骤9、重复步骤4至步骤8得到不同横距条件下的检测概率,结合探测宽度预报模型定义式(1),可计算磁探仪探测宽度。
变换不同初始参数的设定值,可对不同条件下相关因素影响进行分析。
下面结合附图给出两个具体仿真实例,仿真实例验证了不同航向变化及不同噪声等级对计算探测宽度的影响。
基本仿真参数设定:
在领航学中,角度一般都是以地理上的正北为基准,顺时针转为正,逆时针方向为负。以下角度设定均为地理北坐标系下的航向角,即与地理正北方向的夹角,在模型计算中根据磁偏角转换为地磁北坐标系下的磁航向角。
(1)地磁环境参数:设定经度为东经122.5°、纬度为北纬35.5°,根据国际地磁参考场(IGRF)计算模型得到,地磁场为52595.2nT、地磁倾角为53.76°、地磁偏角为-4.63°;磁偏角表示磁北方向与地理北方向的夹角,实际作战中飞机导航的航向是真北航向,即与真北方向的夹角。
(2)水下目标参数:水下目标排水量为4000ton,水下目标艇体坐标系下纵向、横向、垂向的导磁系数为7.3Oe·cm
(3)搭载平台参数设定:搭载平台使用磁探仪时飞行速度为360km/h,飞行高度250m;
(4)磁探仪参数设定:磁探仪采样频率为20Hz,检测积分时间为20s,虚警概率为5%;
(5)环境参数设定:经预处理之后海洋环境磁噪声级(即噪声标准差)为0.5nT;环境噪声方差
在仿真过程中,当计算不同因素影响时,该影响因素变化,其它影响因素设定同以上基本参数。
仿真1:搭载平台航向和水下目标航向变化对探测宽度影响分析
基本仿真参数设定如上述,搭载平台航向分别为0°、45°、90°、135°、180°、225°、270°、315°时,仿真得到水下目标航向变化条件下,磁探仪探测宽度变化曲线,如图4所示。
仿真结果表明水下目标地理航向为正南正北方向(0°和180°)左右时,探测宽度明显的大于水下目标地理航向为正东和正西方向(90°和270°)左右时的探测宽度。这是因为在水下目标正南正和北方向航行时,水下目标磁航向与地磁北方向大致相同,水下目标感应磁场明显增大,从而导致探测宽度增加。基于检测依据的探测宽度预报模型充分考虑了地磁场对水下目标磁特性的影响,而经典的探测宽度预报模型则无法反映这种变化趋势。相同水下目标航向条件下,随着搭载平台航向的变化,探测宽度也有变化,但是变化趋势较小,而且可以发现当搭载平台沿水下目标正横方向通过时的探测宽度要大于沿纵轴方向通过时的探测宽度。
仿真2:背景磁噪声等级和水下目标航向变化对探测宽度影响分析
搭载平台探测航向为90°,环境磁噪声标准差分别为0.1nT、0.5nT、1.0nT、5.0nT,仿真得到水下目标航向变化条件下磁探仪探测宽度变化曲线,如图5所示。
仿真结果表明随着磁噪声等级的增加探测宽度急剧下降,特别在磁噪声等级达到1.0nT以上时,磁探仪探测宽度下降到几十米。航空磁探潜的过程中各种环境磁噪声较为复杂,磁探仪很容易产生虚警,在进行航空磁探测之前必须对环境磁噪声等级进行分析和特性统计,并将磁噪声降低到合理的范围,否则磁探仪将完全无法使用。
- 一种基于检测依据的磁探仪探测宽度预报模型及求解方法
- 一种基于宽度学习模型的泥石流灾害预报方法