集成滑动升降式吊顶装置
文献发布时间:2023-06-19 12:10:19
技术领域
本发明属于装修设备或装置技术领域,具体涉及到一种集成滑动升降式吊顶装置。
背景技术
施工中各专业之间的交叉作业,历来是工程施工中最尖锐的交叉矛盾,特别是装修与安装的交叉问题是一切交叉中的重点,需要重点解决。装饰工程按期、按目标完成的关键在于需要采取分段合理施工的原则,在交叉施工流水作业的同时,要充分体现施工紧张有序的原则和在具备施工作业面的情况下合理组织实施的原则。
现有吊顶具有以下缺点:吊顶内安装管线错综复杂,安装管道、设备较多,检修频率高,设备、管线等维修,也容易造成吊顶二次破坏;吊顶施工与水电、暖通、消防等工种交叉作业,不能有效保证施工工期;由于建筑装饰施工过程涉及的环节较多,很容易造成工期延长,如设计要求较高,设备管线复杂,施工难度大的工程项目,工期会更长,且由于管线设备大都分布于吊顶内部,复杂的装饰设计在有限的吊顶空间内布满管线,维修人员无法到达指定空间进行维修,给后期维护使用带来麻烦。
发明内容
本发明所要解决的技术问题在于克服上述现有技术的缺点,提供一种节省施工工期、减少维修成本的集成滑动升降式吊顶装置。
解决上述技术问题所采用的技术方案是:在屋顶下通过吊杆件设置有至少两个滑动升降式吊顶机构,两个滑动升降式吊顶机构两侧设置有通过吊杆连接的矿棉板,所述的滑动升降式吊顶机构为:吊杆件下端设置有滑轨,滑轨两侧分别通过升降机构和滑动机构与吊顶板块联接,所述的升降机构为:在连接板底部两侧分别设置有第一滚轮与第六滚轮,第一伸缩支撑拉杆上部一侧通过电机的输出轴连接有第二滚轮、下部一侧设置有第三滚轮,第二伸缩支撑拉杆上部一侧联接有第五滚轮、下部一侧设置有第四滚轮,第一牵引绳分别依次连接第一滚轮、第二滚轮、第三滚轮、第四滚轮、第五滚轮、第六滚轮;所述的滑动机构为:连接板下一侧设置有通过水平牵引绳与第一滚轮联接的第七滚轮、另一侧设置有通过水平牵引绳与第六滚轮联接的第八滚轮,滑轨上两侧分别设置有沿滑轨上水平滑动的滑动轮,滑动轮上设置有传感器,左侧的滑动轮下侧设置有第二伸缩支撑拉杆,右侧的滑动轮下侧设置有第一伸缩支撑拉杆,滑轨两侧分别设置有限位器。
本发明的两个滑动升降式吊顶机构之间的水平滑动方式为同向水平滑动或反向水平滑动。
本发明的升降机构还可以为:第一伸缩支撑拉杆上部一侧设置有第七滚轮、下部一侧设置有第八滚轮、底端设置有第一底轮,第二伸缩支撑拉杆上部一侧设置有第十滚轮、下部一侧设置有第九滚轮、底端设置有第二底轮,吊顶板块上端设置有手轮,手轮通过第二牵引绳依次连接第九滚轮、第十滚轮、第二底轮、第一底轮、第八滚轮、第七滚轮。
本发明的吊顶板块为:龙骨编织网架下端设置有收边龙骨,收边龙骨下端设置有装饰板。
本发明的有益效果为:
(1)本发明采用了采用集成滑动升降式吊顶板块与安装工程同步进行,也可以提前施工吊顶,吊顶施工与水电、暖通、消防等工种交叉作业,打破了传统工艺的先安装施工,后吊顶的工艺做法,实现吊顶施工与安装施工互不影响,有效保证施工工期。
(2)本发明通过吊顶施工,不需要考虑吊顶内部安装管线、设备,安装工程在施工或使用期间检修、更换设备时,吊顶通过滑动、升降的方式为安装工程创造工作面,提升空间功能利用率,有效节约施工工期,减少吊顶使用过程中维修工作,解决了现有复杂吊顶内管线设备多,施工周期长,严重制约吊顶施工时间,且后期维修较麻烦的问题。
(3)本发明的吊顶板块提前集中加工安装,实现吊顶装饰板简约化、单元化施工,减少材料浪费,提高施工效率。
附图说明
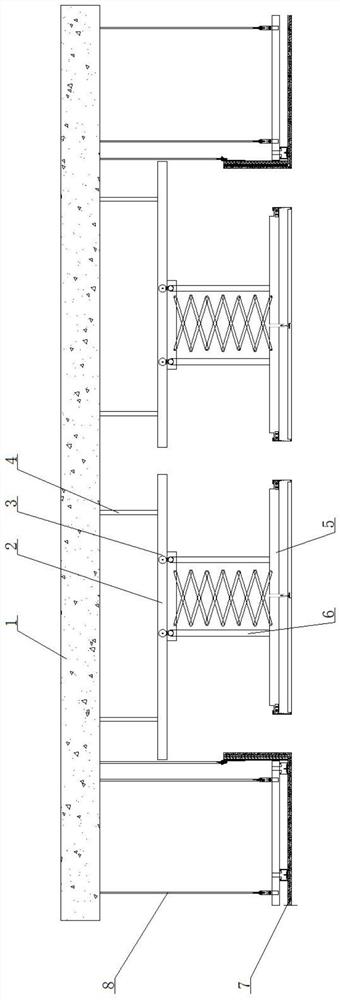
图1是本发明一个实施例的结构示意图。
图2是图1中电动方式的滑动升降式吊顶机构的结构示意图。
图3是图2的右视图。
图4是图2的左视图。
图5是图1中手动方式的滑动升降式吊顶机构的结构示意图。
图6是图5的右视图。
图7是图1中吊顶板块5的结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例1
如图1、7所示,本实施例的集成滑动升降式吊顶装置由屋顶1、滑轨2、滑动机构3、第一吊杆件4、吊顶板块5、升降机构6、矿棉板7、第二吊杆件8联接构成。
在屋顶1下通过第一吊杆件4安装有至少两个滑动升降式吊顶机构,两个滑动升降式吊顶机构之间的水平滑动方式为同向水平滑动或反向水平滑动。两个滑动升降式吊顶机构两侧安装有第二吊杆件8,第二吊杆件8下端与矿棉板7连接,滑动升降式吊顶机构由滑轨2、滑动机构3、第一吊杆件4、吊顶板块5、升降机构6联接构成,滑动升降式吊顶机构为:第一吊杆件4下端安装有滑轨2,滑轨2两侧分别通过升降机构6和滑动机构3与吊顶板块5联接。吊顶板块5由龙骨编织网架501、收边龙骨502、装饰板503联接构成,吊顶板块5为:龙骨编织网架501下端安装有收边龙骨502,收边龙骨502下端安装有装饰板503。
如图2~4所示,本实施例的升降机构6采用电动方式,升降机构6由连接板601、第一滚轮602、电机603、第二滚轮604、第一牵引绳605、第一伸缩支撑拉杆606、第三滚轮607、第四滚轮608、第二伸缩支撑拉杆609、第五滚轮6010、第六滚轮6011联接构成,升降机构6为:在连接板601底部两侧分别安装有第一滚轮602与第六滚轮6011,第一伸缩支撑拉杆606上部一侧通过电机603的输出轴连接有第二滚轮604、下部一侧通过连接杆安装有第三滚轮607,第二伸缩支撑拉杆609上部一侧联接有第五滚轮6010、下部一侧设置有第四滚轮608,第一牵引绳605分别依次连接第一滚轮602、第二滚轮604、第三滚轮607、第四滚轮608、第五滚轮6010、第六滚轮6011;本实施例的滑动机构3采用电动方式,滑动机构3由滑动轮301、第七滚轮302、限位器303、水平牵引绳304、传感器305、第八滚轮306联接构成,滑动机构3为:连接板601下一侧安装有通过水平牵引绳304与第一滚轮602联接的第七滚轮302、另一侧安装有通过水平牵引绳304与第六滚轮6011联接的第八滚轮306,滑轨2上两侧分别安装有沿滑轨2上水平滑动的滑动轮301,滑动轮301上安装有传感器305,左侧的滑动轮301下侧安装有第二伸缩支撑拉杆609,右侧的滑动轮301下侧安装有第一伸缩支撑拉杆606,滑轨2两侧分别设置有限位器303,限位器303的型号为LX3-11H,限位器303用于限制两个滑动轮301的位置。
本实施例的工作原理如下:
人工作业时,启动电机603,电机603的输出轴带动第二滚轮604转动,第一牵引绳605依次带动第一滚轮602、第三滚轮607、第四滚轮608、第五滚轮6010、第六滚轮6011转动,带动第一伸缩支撑拉杆606与第二伸缩支撑拉杆609下降伸展,带动吊顶板块5下降,由于第一伸缩支撑拉杆606与第二伸缩支撑拉杆609的限制,吊顶板块5下降到设定高度,电机603仍在转动,由于吊顶板块5不再下降,电机603通过水平牵引绳304带动第七滚轮302与第一滚轮602、第八滚轮306与第六滚轮6011转动,带动滑动轮301在滑轨2上水平滑动,滑动轮301上的传感器305触碰到限位器303时,电机603自动停止,露出屋顶,工人进行作业。当吊顶内作业全部完成,吊顶板块5需复位时,继续启动电机603,第一伸缩支撑拉杆606与第二伸缩支撑拉杆609上升收缩,滑动轮301在滑轨2上水平滑动至初始状态。
实施例2
如图5~6所示,本实施例的升降机构6采用手动方式,升降机构6由第一伸缩支撑拉杆606、第二伸缩支撑拉杆609、第七滚轮6012、第八滚轮6013、第一底轮6014、第二底轮6015、手轮6016、第九滚轮6017、第二牵引绳6018、第十滚轮6019联接构成,升降机构6为:第一伸缩支撑拉杆606上部一侧安装有第七滚轮6012、下部一侧安装有第八滚轮6013、底端安装有第一底轮6014,第二伸缩支撑拉杆609上部一侧安装有第十滚轮6019、下部一侧安装有第九滚轮6017、底端安装有第二底轮6015,吊顶板块5上端安装有手轮6016,手轮6016通过第二牵引绳6018依次连接第九滚轮6017、第十滚轮6019、第二底轮6015、第一底轮6014、第八滚轮6013、第七滚轮6012。
本实施例与实施例1其他零件之间的连接关系相同。
本实施的工作原理如下:
人工作业时,人工摇动手轮6016,第二牵引绳6018传动依次带动第九滚轮6017、第十滚轮6019、第二底轮6015、第一底轮6014、第八滚轮6013、第七滚轮6012转动,带动第一伸缩支撑拉杆606与第二伸缩支撑拉杆609下降伸展,带动吊顶板块5下降,由于第一伸缩支撑拉杆606与第二伸缩支撑拉杆609的限制,吊顶板块5下降到设定高度,人工通过滑动轮301移动吊顶板块5向两侧水平移动,露出屋顶,工人进行作业。当吊顶内作业全部完成,吊顶板块5需复位时,人工通过滑动轮301移动吊顶板块5向中间水平移动,反向摇动手轮6016,第一伸缩支撑拉杆606与第二伸缩支撑拉杆609上升收缩,滑动轮301在滑轨2上水平滑动至初始状态。
以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
- 集成滑动升降式吊顶装置
- 集成滑动升降式吊顶装置