一种自举升车梯
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及一种自举升车梯,该装置采用汽车自身车轮转动的动力产生举升力,在不需要电力等外部能源的情况下即可实现对车辆的举升,可广泛用力立体车库等对车辆高度举升有要求的场合。本发明涉及机械设计等技术领域。
背景技术
停车难是现代社会越来越严重的一个社会问题,立体停车库的出现从一定程度上解决了停车难的问题。但如今的立体车库大多需要配合电动升降装置实现车辆的举升。在立体车库的实际运营发现,立体车库的耗电量十分巨大,一般车辆的自重在一到两吨左右,将如此大的重量提升几米、甚至几十米需要耗费的能量可想而知。因此电费成为立体停车过程中最大的运营成本。很多小区目前都配备有双层立体车位,但是由于需要庞大的电量驱动,使得上层车位的使用成本非常高,很多小区甚至舍弃上层车位空置不用,这就造成了停车资源的极大浪费。
发明内容
为了克服传统立体车库及立体停车场的上述不足之处,本发明采用汽车自身车轮转动的动力产生举升力,在不需要电力等外部能源的情况下即可实现对车辆的举升,具体的技术方案如下所述。
本发明的技术方案为:一种自举升车梯,其特征在于车梯举升平台(11)两端分别有一对动力滚(14),动力滚(14)吸收车梯内车辆前部驱动轮传来的动力发生转动,该转动力矩经过驱动小齿轮(1)、驱动大齿轮(5)、小伞齿轮(12)、大伞齿轮(2)传导给蜗杆齿轮(3),通过蜗杆齿轮(3)变速后将力矩传导给爬升齿轮(4),由于爬升齿轮(4)与爬升齿条(15)之间的咬合作用实现车梯的上下移动;优选的所述的自举升车梯,其特征在于举升平台(11)两端还装配有一个可转动的盖板(6),盖板(6)上装配有复位弹簧(7),该复位弹簧可使盖板(6)在撤去外力的情况下最终复位到竖直状态。
本发明的有益效果是采用汽车自身车轮转动的动力产生举升力,在不需要电力等外部能源的情况下即可实现对车辆的举升,装置结构简单、实现成本低、应用潜力巨大。
附图说明
下面结合附图和实例对本发明进一步说明。
图1车辆的举升步骤1
图2车辆的举升步骤2
图3车辆的举升步骤3
图4车辆的举升步骤4
图5车辆的举升步骤5
图6 车辆的举升步骤6
图7 车辆的举升步骤7
图8 车辆下梯步骤1
图9 车辆下梯步骤2
图10车辆下梯步骤3
图11车辆下梯步骤4
图12 车辆下梯步骤5
图13车辆下梯步骤6
图14车辆举升体主体结构视角1示意图
图15车辆举升体主体结构视角2示意图
图16车辆举升体主体主要零部件装配过程视角1
图17车辆举升体主体主要零部件装配过程视角2
图18盖板在车辆举升体主体上的位置图
其中,图15中1.驱动小齿轮,2.大伞齿轮,3.蜗杆齿轮,4.爬升齿轮,5.驱动大齿轮,6.盖板,7.复位弹簧,8.蜗-伞传动杆,9.直-爬传动杆,10.直齿轮,11.举升平台,12.小伞齿轮,13.轨道滚;图16中的14.动力滚;图18中的15.爬升齿条,16轨道,17.止动块。
具体实施方式
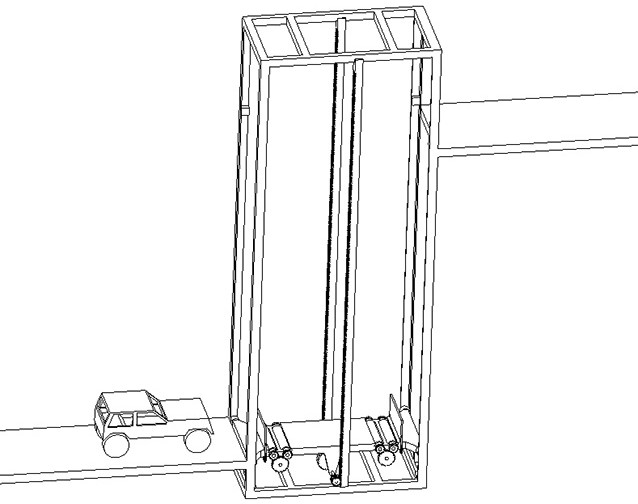
装配过程:首先按照图15的方式将各个主要部件组装,再将组装后的车辆举升体主体放入轨道内,装配后的效果如图1所示。
工作原理:如图5所示,对一般的前驱车辆,其动力输出为前轮,前轮在两个动力滚(14)上面转动将带动两个驱动小齿轮(1)同向转动,与小齿轮(1)咬合的驱动大齿轮(5)也开始转动,驱动大齿轮(5)带动同轴上的小伞齿轮(12)转动,小伞齿轮(12)带动大伞齿轮(2)转动,该转动通过蜗-伞传动杆(8)传递给蜗杆齿轮(3)及另外一组对称的动力滚,蜗杆齿轮(3)再与直齿轮(10)变速后将驱动力传递给直-爬传动杆(9)两端的爬升齿轮(4),由于两端的爬升齿轮(4)与爬升齿条(15)咬合,故爬升齿轮(4)将带动车辆举升体主体沿轨道(16)进行爬升。当爬升到最高点时轨道滚(13)将被止动块(17)卡住,此时车轮将无法再使动力滚(14)转动,于是车轮便越过两个动力滚(14),并推倒前方的盖板(6),然后开出举升平台(11),完成车辆的举升。其过程如图1-图7所示。车辆下车梯的过程与举升过程刚好相反,具体过程如图8-图13所示。在进入车梯时车辆前轮首先将前方的第一块盖板(6)推倒,当盖板盖板(6)被完全推倒至水平方向时,盖板(6)便架在两个动力滚(14)之上,车轮将从盖板之上碾过。此时由于车轮未接触第一组动力滚(14)故整个传动装置不工作,但当车轮行驶至第二组动力滚时便陷于第二组动力滚的两滚之间,车轮开始原地转动并带动该组动力滚发生转动。由于此时动力滚(14)的转动方向与举升时刚好相反,故此时举升平台(11)将开始缓慢下降,下降至最低点时车辆出车梯的过程与举升阶段出车梯的原理与过程类似,只是车辆行驶的方向不同,此处不再赘述。
需要说明的是,由于传动系统中采用了蜗杆变速方案,而蜗杆变速具有单方向力矩传导的特点,故动力滚(14)可以通过一系列传动将动力传给爬升齿轮(4),但爬升齿轮(4)的力矩却无法反向传导给动力滚(14),这就保证了车辆举升体主体不会在重力的作用下发生自由下滑的现象,从而保证了车梯的安全性。
- 一种自举升车梯
- 飞机客梯车专用举升高度控制装置