CTA三维重建镜像数据图像投影方法、图像处理方法及装置
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及一种CTA三维重建镜像数据图像投影方法、图像处理方法及装置,尤其涉及一种可与血管造影精准融合的CTA三维重建镜像数据图像投影方法、图像处理方法及装置,属于医疗图像处理技术领域。
背景技术
数字减影血管造影(DSA),是具有数字减影功能、脉冲透视功能的血管造影X线机。主要用于心脏、脑血管、外周血管的造影诊断及介入治疗,在心血管手术过程中可以进行图像的实时拍摄和回放,以及病灶路径指示。利用DSA机(C臂机)可以减少X线对病人及手术医生的辐射,因此近年日益普及。DSA机包括可以转动的机架(包括C臂和P臂)、可以水平/纵向/上下移动的导管床、高压发生器、X线球管、影像增强器、摄像系统(探测器)、影像数字处理系统、DSA显示屏和外部数据存储系统。
在经皮冠状动脉介入治疗(PCI)手术中,医生们一直依赖X线透视来指导手术。然而,由于透视检查仅限于二维投影,医生主要是通过直觉和触觉反馈来理解这种治疗方法,因此这种手术的准确性并不能得到保证。众所周知,CT血管造影(CTA)可以清晰显示冠状动脉及其分支。CTA三维重建不仅可以重建冠状动脉,还可以重建主动脉、心房和心室,使医生可以直观地了解冠状动脉的三维轮廓和邻近结构。其分辨率远高于C臂机进行的冠脉造影(CAG)得到的图像。为了弥补冠脉介入术中X线二维投影的不足,CTA和CAG的融合配准的方法已成为研究热点。
目前的融合方法,比如Innova HeartVision或Navigation都是采用将CT工作站中的CTA重建三维图像直接重叠在CAG影像上,且以医生眼睛或探测器所在的位置作为视点。这种影像融合方式不精确,并且只能在C臂左右旋转的情况下进行融合,无法适用于冠脉介入术中DSA机架左右和头足位同时旋转的应用场景,所以目前只能用于大动脉介入手术,如图1所示。
中国实用新型专利第200820123994.6号,名称为“基于CT三维重建与血管造影的实时血管走形显像系统”,利用定位C臂在手术中的位置,来匹配术前CT三维重建影像与DSA造影图像。中国发明专利申请第201610201387.6号,名称为“一种冠脉图像处理方法和装置”,将冠脉血管的CTA图像和DSA图像,利用CTA图像的中心线和DSA图像(与CTA图像相似度最高的那一帧DSA图像)的中心线进行配准,从而得到融合图像。由于只是要求中心线融合,所融合图像缺乏深度信息,这种融合方法将大大降低冠状动脉介入手术(PCI)术者的立体感知,而DSA图像的立体感知对于PCI术者是极其重要的。此外,这些方法并没有从PCI术者的角度探讨CAG与CTA的本质区别。由此产生的融合图像是各种复杂算法的叠加,操作过程复杂,精度低,难以被PCI术者理解和接受。
发明内容
本发明所要解决的一个技术问题在于提供一种CTA三维重建镜像数据图像投影方法。
本发明所要解决的又一个技术问题在于提供一种CTA三维重建镜像数据图像处理方法。
本发明所要解决的再一个技术问题在于提供一种CTA三维重建镜像数据图像投影装置。
为实现上述发明目的,本发明采用以下技术方案:
一种CTA三维重建镜像数据图像投影方法,血管造影是使用DSA机获得的,DSA机具有X线管球、导管床、探测器以及DSA显示屏,包括以下步骤:
获得CTA三维重建镜像数据;
将CTA三维重建镜像数据的图像投影模式设置为透视投影模式;
将CTA三维重建镜像数据的透视投影的投影中心至DSA显示屏的距离校正为X线管球至探测器的距离;并且将CTA三维重建镜像数据的透视投影的投影中心至目标位置的距离校正为X线管球至导管床的距离;
将CTA三维重建镜像数据的透视投影的屏幕中心与DSA造影图像的中心重叠。
其中较优地,DSA机X线管球至导管床的距离,以及X线管球至导管床的距离,均为DSA机的在正位状态下的距离。
其中较优地,使DSA造影图像中胸椎的X线投影与CT三维重建镜像数据的透视投影精准融合。
其中较优地,使DSA造影图像中的脊柱X线投影与CT三维重建镜像数据中的脊柱的透视投影相重叠,或者
使DSA造影图像电极片的连线与CT三维重建镜像数据中的电极片的连线平行。
其中较优地,目标位置是脊柱所在位置,或者电极片连线所在的与导管床平行的平面。
一种CTA三维重建镜像数据图像处理方法,用于与血管造影精准融合,血管造影是使用DSA机获得的,DSA机具有X线管球、导管床以及DSA显示屏,包括以下步骤:
获得CTA三维重建镜像数据;
将CTA三维重建镜像数据的图像投影模式设置为透视投影模式;
将CTA三维重建镜像数据的透视投影的投影中心至DSA显示屏的距离校正为X线管球至探测器的距离;并且将CTA三维重建镜像数据的透视投影的投影中心至目标器官的距离校正为X线管球至导管床的距离;
将调整后的CTA三维重建镜像数据的透视投影,显示在融合装置的DSA显示屏上;
使DSA造影图像中的两电极的X线投影与其在CT三维重建镜像数据的透视投影精准融合;
根据DSA机的机架的旋转角度来旋转重建镜像数据的透视投影;
获得并输出融合图像。
其中较优地,根据DSA机当前状态下的X线管球至导管床的距离,调整投影中心到脊柱的距离,使两者相等;并且根据X线管球至探测器的距离,调整CTA图像的投影中心到屏幕的距离,使两者相等。
其中较优地,将CTA三维重建镜像数据的透视投影的屏幕中心与DSA造影图像的中心重叠;
其中较优地,CTA三维重建镜像数据的透视投影的图像,具有X轴和Z轴,
CTA三维重建镜像数据的透视投影的图像处于正视图时,以当前状态下,DSA机的C臂角度旋转X轴,而后按照P臂角度旋转Z轴。
一种CTA三维重建镜像数据图像投影装置,装置连接DSA机以实现CTA三维重建镜像数据的投影,DSA机包括C臂、探测器、导管床、X线球管和DSA显示屏,该装置的DSA显示屏上显示的图像,具有以下特点:
CTA三维重建镜像数据的投影模式为透视投影模式;CTA三维重建镜像数据的透视投影的投影中心到人体目标器官的距离等于X线管球到导管床的距离;CTA三维重建镜像数据的透视投影的投影中心至DSA显示屏的距离为X线管球至探测器的距离。
利用本发明,可以方便地使得DSA术中患者的体位与其在CT检查中的体位一致;而且,三维重建CTA的图像与DSA图像,可以实现精准的融合,配准正确,视点一致,空间关系正确,图像无扭曲。同时,还能帮助介入手术的术者快速建立DSA造影的立体感知,显著提高介入术者水平,方便制定治疗方案,降低介入手术难度,明显改善患者预后。
附图说明
图1为现有技术中造影图像与CTA三维重建数据图像的融合效果图;
图2为旋转顺序对图像融合效果的影响的示意图;
图3A-3E为本发明的立体图像旋转顺序对图像融合效果影响的原理图;
图4A-4B为本发明的可与DSA造影精准融合的CTA三维重建数据图像处理方法的流程图;
图5A-5G本发明的可与血管造影精准融合的CTA三维重建数据后的处理图像的模拟效果图;
图6为本发明的可与血管造影精准融合的CTA三维重建数据后的处理图像的实际效果图。
具体实施方式
下面结合附图和具体实施例对本发明的技术内容进行详细具体的说明。
为了清楚地说明本发明的技术内容,先介绍CTA图像与CAG图像融合误差的形成原因,及其对冠状动脉介入手术的术者的CAG立体感知的影响。但是,本发明只是以CTA图像作为示例,并不限于冠状动脉介入手术,只要是DSA机获得的图像和CT机获得的图像,这两者的融合,就可以适用本发明的方法。例如,利用CT机和DSA机分别获得的骨骼系统、消化系统、生殖系统、泌尿系统等的图像,将这两种设备拍摄的相同部位的图像进行融合,就可以采用本发明的重建方法,以及基于该重建方法的融合方法。
而且,只要是透视成像的设备产生的图像(例如DSA机),与平行投影成像的设备(例如CT机)产生的图像,进行融合,均可以采用本发明的方法。
X线成像相当于以管球为投影中心的透视投影,是透视图的等比例放大,因此X线成像完全符合透视原理,与透视图本质上是一样的,这也是通过二维X线成像获得立体感的理论基础。
与透视投影对应,另外一种在二维屏幕上显示三维物体的投影方法称为平行投影,所谓平行投影是指将投射中心移到离物体无穷远处,则所有的投射线都相互平行,这种投射线相互平行的投影方法,称为平行投影,几乎所有的CT工作站都采用平行投影来显示三维CT重建数据。
DSA机的X线成像相当于以球管为投影中心(视点)的透视投影,X线成像完全符合透视原理。由于冠脉造影(X线透视)属于透视投影,因此无法与CT工作站的平行投影图直接融合,且目前图像融合所采纳的主流观点,例如通用技术集团医疗健康有限公司的InnovaHeartVision系统,误将术者或探测器的视角作为冠脉造影图像的视点,由于视点选择错误,透视投影所得的CTA后处理图像和冠脉造影正好相反,因此会进一步导致冠脉造影立体感知缺失。
为了修正这种错误,本发明提出将CTA三维重建镜像数据由平行投影转换成透视投影以获得与冠脉造影完全融合的立体图像。由此,可以实现精确融合,同时通过将此立体图像直接展示在医生眼前,可以帮助医生快速建立冠脉造影的立体感。
由于C臂旋转会导致造影图像变换,进而造成与CT图像融合有误差。为此,需要先理解三维立体图像在显示屏上是如何旋转的。为了方便理解,简单研究旋转轴,以下用16立方魔方为例进行说明。如图2所示,将16立方魔方放置在DSA机平台上,在X射线下可以清晰地看到魔方的X、Y、Z轴的交叉垂线(图2A图所示为DSA机架为正位时的魔方X线影像),采集不同DSA机架角度下魔方的x射线图像,利用UG NX11.0建立魔方的数字模型(图2B所示为数字模型的正视图及其X、Y、Z轴)。按照DSA机架的角度,可以用两种方式来旋转魔方的数字模型,以得到图2C(魔方的DSA图像旋转效果图)和图2D(数字模型的旋转效果图)所示的旋转后的效果:第一种方法是先在图2B中所示正视图中以P-臂角度旋转Z轴,然后再以C-臂角度旋转X轴(得到图2E所示效果)。第二种方法是先在正视图中以C-臂角度旋转X轴,然后再以P-臂角度旋转Z轴(得到图2F所示效果)。在图2F中,发现魔方数字模型中的X、Y、Z轴与魔方DSA图像中的X、Y、Z轴在第二种方式中完全重合(如图2F所示,浅灰色表示的魔方透视图与深色表示的数字模型图重叠);在第一种方式得到的效果图中不重合(如图2E所示,浅灰色表示的魔方透视图与深色表示的数字模型图不重叠)。由于魔方数字模型中的正视图中的X轴平行于屏幕的上下边缘,X轴旋转后的Z轴与显示屏的左右边缘成角度(该角度等于X轴旋转角度),可以得出DSA造影图像的C臂旋转轴与显示屏的上、下边缘平行,而负责左右旋转的P臂旋转轴与显示屏的左右缘随头足位的角度变化而成角,所成角度与头足位的角度相等。
下面具体介绍DSA机在手术中的旋转与DSA显示屏4上显示的DSA图像之间对应的位置关系。如图3A所示,C臂机的C臂处于正位时(未旋转),探测器2位于导管床3的正上方,X线球管5位于导管床3的正下方,与探测器2上下对齐。随着C臂1的旋转,DSA图像可以实现绕头足旋转轴的旋转,随着P臂的旋转,DSA图像也可以实现绕左右旋转轴的旋转。
由于在DSA机配合使用的DSA显示屏4上显示的图像,就是探测器2探测范围的图像,因此DSA机探测器2的边缘与DSA显示屏4的边缘相同。如图3A中所示,探测器2的探测范围与DSA显示屏4均是矩形,具有左缘、右缘、上缘和下缘。上缘/下缘平等,并且与左缘/右缘垂直。如图3A所示,探测器2的左缘,会在DSA显示屏4的左缘显示出来;探测器2的的右缘,会在DSA显示屏4的右缘显示出来。
下面介绍头足旋转轴的确定。由于探测器固定在负责头足旋转的C臂上,C臂旋转轴始终与探测器的上下缘平行,因此DSA图像的头足旋转轴也始终平行于DSA显示屏4的上下边缘,无论P臂的角度如何变化。
左右旋转轴的确定:当负责头足旋转的C臂转动时,C臂相对于负责DSA图像左右位旋转的P臂产生相对运动,因此,固定在C臂上的探测器也相对于P臂转轴产生相对移动。进一步,如图3B所示,探测器在正位时的位置(图中标记2的位置)与其在足位30度时的位置(图中标记2’的位置),其法线夹角为C臂转角θ。探测器2所在平面(与前述探测器的法线垂直的平面)与P臂转轴的夹角γ,利用几何知识可知,等于头足转角θ。结果得到DSA图像左右旋转轴与DSA显示屏的左右缘随C臂头足位的角度变化而成角,所成角度与C臂头足位的角度相等。
如图3C所示。对应的,DSA造影时,DSA图像头足转轴无论如何旋转始终与DSA显示屏4的上、下边缘平行,而左右旋转轴与DSA显示屏4的上下缘所在平面的夹角,随C臂转轴的旋转角度而变化。
众所周知,3D融合(3D fusion)技术,是将DSA 3D旋转技术和CTA三维重建技术,将两个不相似的体积采集进行配位。3D融合技术需要先在DSA血管造影的3D图像(X线造影图像)上准确地选择具有解剖标志的多个解剖点,然后在预先获得的同一患者的CTA三维投影图像上找到对应的解剖点进行融合。该技术通过计算机三维旋转功能来代替C臂的旋转,减少辐射剂量,简便操作。
基于上述魔方和数字模型的旋转方式分析,本发明提出可与血管造影精准融合的CTA三维重建数据图像的投影方法、以及基于该投影方法的图像处理方法。如图4A和4B所示,本发明的可与血管造影精准融合的CTA三维重建方法包括以下步骤。
<第一实施例>
本发明的第一实施例的可与血管造影精准融合的CTA三维融合方法包括以下步骤。
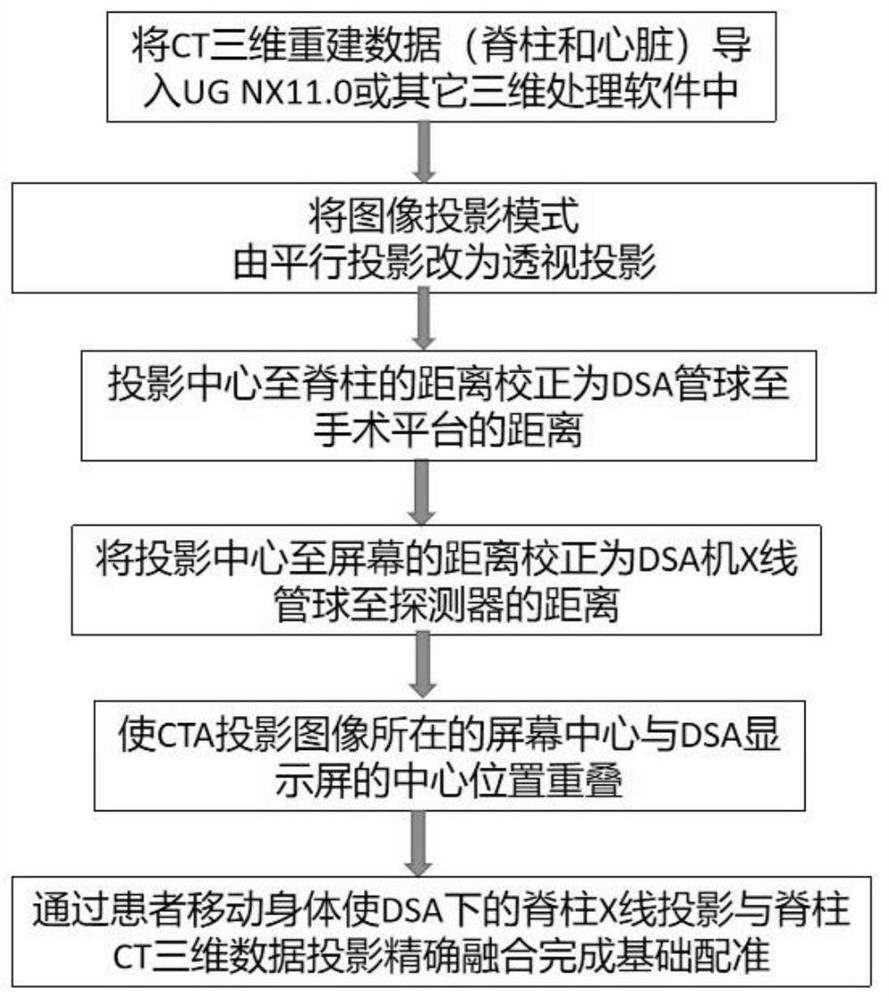
S1:获得三维重建镜像数据
将CT扫描得到的三维重建镜像数据,例如CTA三维数据,导入UG NX11.0或其他三维软件中。由此,可以获得脊柱的CTA三维数据以及病灶所在位置的CTA三维数据。脊柱、胸椎、肋骨等的CTA三维数据,用作病灶的CTA三维数据的位置的参考位,但是优先脊柱。换言之,病灶所在相对位置(相对于脊柱的位置)是重建的关键位置信息。在此,病灶可以是心脏,也可以是肾脏等。
S2:将CTA三维重建镜像数据的图像投影模式设置为透视投影模式
如前述,通过专业软件的配置,将CTA三维重建镜像数据设置为透视投影,使得CTA图像与DSA造影图像,具有相同的投影模式(透视模式)。
S3:将CTA三维重建镜像数据的透视投影的投影中心至脊柱的距离校正为X线管球至导管床的距离。
由于DSA造影时,脊柱紧贴导管床,因此可以将两者的位置视为相同。CTA三维重建镜像数据的透视投影的投影中心至脊柱的距离,可以视作为CTA三维重建镜像数据的透视投影的投影中心至导管床的距离(更精准的是,投影中心至导管床表面的距离)。
S4:将CTA三维重建镜像数据的透视投影的投影中心至DSA显示屏的距离校正为X线管球至探测器的距离。
通过修改专业软件的参数配置,可以将投影中心到病灶的距离进行调整,使其与DSA造影图像时的X线管球至探测器的距离相等。将两者距离调整为相等,则可以保证两图像中的病灶大小一致。在此,DSA机X线管球至导管床的距离,以及所述X线管球至所述导管床的距离,均为DSA机的在正位状态下的距离。
S5:将经过上述步骤调整后的CTA三维重建镜像数据的透视投影的屏幕中心与DSA造影图像的屏幕中心重叠。
本发明实施例中的DSA显示屏4的中心,是DSA管球在屏幕的投影。CTA三维重建镜像数据的透视投影的屏幕中心为投影中心点在屏幕的投影。将两者的屏幕中心重叠,就能将CTA三维重建镜像数据投影中心与DSA管球的位置重叠,就使得两图像具有共同的坐标原点。
经过步骤S1-S5就完成了CTA三维重建镜像数据的透视投影。
S6:使DSA造影图像中胸椎的X线投影与其在CT三维重建镜像数据的透视投影精准融合。
在此,可以通过让患者移动身体,来使DSA造影图像中的脊柱X线投影与脊柱的CTA三维重建镜像数据的透视投影,重叠。当然,如果患者姿势一样,则可以通过移动CTA三维重建镜像数据的透视投影,使其脊柱与DSA造影图像中的脊柱重叠。
经过前述步骤S2-S6的调整,CTA三维重建镜像数据的透视投影,与DSA造影图像具有相同的投影模式(透视模式)、相同的视点以及相同的位置姿势,已具备进行精准融合的条件,完成了CTA三维重建镜像数据的基础配准。
在前述基础配准后,如图4B所示,DSA造影手术中的实时配准方法如下。
S7:术中根据DSA机X线管球至导管床的距离,以及管球至探测器的距离,调整参数
手术时,由于医生会基于病灶位置等原因,调整导管床与探测器的相对位置或导管床与X线管球的相对位置。所以,在进行导管床的位置调整后,医生需要调取专业软件中的参数,根据DSA机X线管球至导管床的距离,调整投影中心到病灶的距离,使两者相等;并且根据管球至探测器的距离,调整CTA图像的投影中心到屏幕的距离,使两者相等。当然,如果导管床没有调整位置,那么就可以省略本步骤。
在此,DSA机X线管球至导管床的距离,以及所述X线管球至所述导管床的距离,均为DSA机的在当前状态下的距离。
S8:根据DSA机架的旋转角度来旋转CTA三维图像
医生可以根据DSA机架的旋转角度来旋转CTA三维重建镜像数据的透视投影,旋转相同角度,以使其与DSA造影图像重叠。
CTA三维重建镜像数据的透视投影中,正视图时以对应C臂角度旋转X轴。而后按照P臂角度旋转Z轴。对CTA三维数据的三维图像以先X轴后Z轴这样的顺序旋转后,CTA三维数据的重建的三维图像与DSA造影图像就精准对齐了。
S9:根据DSA机的姿态变换,实时调整图像位置
手术中,术者需要实时调整CTA三维重建镜像数据的透视投影在DSA显示屏4中的位置,使贴于胸椎的两电极的CT三维重建图像始终与其DSA图像重叠。
S10:获得并输出融合图像
利用步骤S7-S10,将CTA三维重建镜像数据的透视投影与造影图像重叠,成为融合图像,获得与介入术中X线造影影像完全一致的立体图像。
以下介绍利用本发明的可与血管造影精准融合的CTA三维重建镜像数据的图像处理方法,获得的技术效果。
如图5A-图5C所示,使用UG NX11.0模拟PCI术中DSA机架常见动作对二维X线图像的影响。由于模型投影影像的缩放均匀,平行投影(如图5A所示),或X线(透视)投影时,升降探测器(屏幕),图像无变化(图5B所示);相反,由于所有的X线都来自于X线管球的微小焦点(视点),管球或视点离心脏模型越近(如降低DSA机导管床),投影影像的缩放越不均匀,图像的畸变越明显,反之亦然(图5C所示)。此外,当平移导管床使DSA图像在屏幕中的位置发生变化时,从球管焦点到物体的X线会与移动前球管焦点到物体的X线成角(不平行),导致手术平台(导管床)水平移动时X线图像自动旋转(图5D);当物体位于DSA机ISO中心时,无论C臂角度如何,从X线管球(视点)发出的到物体的X线总是指向探测器的固定位置;因此,无论DSA机架角度如何变化,模型的X射线图像都可以在屏幕上保持其位置(图5E);当物体低于DSA机ISO中心,DSA机架旋转后,从X线管球(视点)发出的到物体的X线指向探测器的位置会发生变化,结果X线图像旋转角度(角2)会大于C臂旋转角度(角3),这与图5D的机制是一致的。可以在DSA机架旋转后,将手术平台水平移动,使X线投影回到其在屏幕上旋转前的位置,所获得的图像旋转角度即等于DSA机架旋转角度(图5F,图5G)。由此可知,投影图形的变换完全由X线管球与目标物体的相对空间位置关系决定,管球到导管床的距离,DSA目标图像在屏幕中的位置,即其与DSA显示屏的屏幕中心(屏幕中心为管球中心在探测器上的投影)的相对位置,及DSA机架角度,这三者结合便可得出管球与目标物体的相对空间位置关系。而管球到探测器的距离则决定了投影图像的缩放大小。而且,由于DSA机架旋转会导致DSA图像在DSA显示屏的屏幕中的位置发生变化,因此也会影响造影图像。
如图6所示,利用本发明的可与血管造影精准融合的CTA三维融合方法,获得的融合图像质量高。从图中可以见到,CTA三维重建镜像数据的透视投影,与血管造影的图像,在多个造影体位(足位27.7度等A-D四个位置)均实现精准的融合。融合图像中,配准正确,视点一致,空间关系正确,图像无扭曲。
按照以上步骤处理后的数据模型既能实现CTA重建的三维数据影像与冠脉造影的精准融合,同时提供血管解剖结构的深度信息,能帮助冠脉介入术者快速建立冠脉造影的立体感知,显著提高冠脉介入术者水平,方便制定治疗方案,降低介入手术难度,明显改善患者预后。
本发明还提供一种使用前述重建方法的装置,DSA机。该DSA机包括C臂、探测器、导管床、X线球管和DSA显示屏,以及影像数字处理系统,用于执行前述步骤。影像数字处理系统对CTA三维重建镜像数据进行旋转时,先按照C臂角度旋转重建的三维图像正位时的X轴,然后再按照P臂角度旋转重建的三维图像的Z轴。
使用本发明的所述装置,其显示的三维图像中,头足位旋转轴与屏幕上下缘平行,左右旋转轴与屏幕左右缘成角度,所成角度为头足位角度。在所述装置的DSA显示屏上显示的重建或整合后的图像具有以下特点:1.CTA三维数据为镜像数据,图像投影模式为透视投影模式;2.CTA三维图像的投影中心到人体目标器官(例如脊柱)的距离等于X线管球到导管床的距离;3.CTA三维重建镜像数据的透视投影的投影中心至屏幕的距离为X线管球至探测器的距离;4.CTA三维重建镜像数据的透视投影的屏幕中心与DSA机屏幕中心重叠;5、DSA图像的头足位旋转轴与屏幕或视图平面的上下缘平行,而左右旋转轴与屏幕或视图平面的左右缘以头足位角度成角。这些特点与CT工作站中的CTA三维重建数据的显示特点不相同。而且,本发明实施例中,固定剑突,移动肩部可使DSA术中患者胸部平躺的体位(姿势)与CT检查时患者的体位(姿势)一致。
<第二实施例>
本发明的第二实施例中的与血管造影精准融合的CTA三维融合方法包括以下步骤。
S1:获得三维重建镜像数据
与第一实施例类似,可以获得电极片的CTA三维数据以及病灶所在位置的CTA三维数据。在CT扫描时,将上下两电极片贴在患者胸椎上(其中靠下的电极对应剑突,两电极片相距13cm左右),并精确记录电极片位置。于呼气末时完成CT扫描以去除呼吸干扰并将电极片重建出来,得到两电极片的CT三维重建图形中的连线。
步骤S2,与第一实施例的步骤相同,在此不赘述。
S3:将CTA三维重建镜像数据的透视投影的投影中心至电极片连线所在的与导管床平行的平面的距离,校正为X线管球至导管床的距离。
步骤S4-S5,与第一实施例的步骤相同,在此不赘述。
经过步骤S1-S5就完成了CTA三维重建镜像数据的透视投影。
S6:使DSA造影图像中的两电极的X线投影与其在CT三维重建镜像数据的透视投影精准融合。
因为患者在前述步骤S1中,已贴上了两电极片,所以在DSA造影术中,让患者平躺后,术者按住患者剑突,使患者按住的部位及以下不动,仅平移肩膀(即固定住对应剑突的电极位置,只移动靠近电极的位置)使X线透视下两电极的连线与电极片在CT三维重建图形中的连线相平行,从而保证了使DSA术中患者胸部平躺的体位与CT检查时的体位一致。
经过前述步骤S2-S6的调整,CTA三维重建镜像数据的透视投影,与DSA造影图像具有相同的投影模式(透视模式)、相同的视点以及相同的位置姿势,已具备进行精准融合的条件,完成了CTA三维重建镜像数据的基础配准。在前述基础配准后,进行DSA造影手术中的实时配准方法与第一实施例中的步骤相同,在此不赘述。
上面对本发明可与血管造影精准融合的CTA三维重建方法、融合方法及装置进行了详细的说明。对本领域的一般技术人员而言,在不背离本发明实质内容的前提下对它所做的任何显而易见的改动,都将构成对本发明专利权的侵犯,将承担相应的法律责任。
- CTA三维重建镜像数据图像投影方法、图像处理方法及装置
- CTA三维重建镜像数据的投影方法、图像处理方法及装置