一种多仪器组合测量系统的校准方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及一种多仪器组合测量系统的校准方法,是一种针对多仪器组合测量系统的外参数及坐标测量的准确度的校准方法,属于计量测试领域。
背景技术
面对航空航天、船舶等大型装备制造中大空间、高精度、多信息、低成本以及高效可靠的测量需求,由多台或多种测量仪器组成的多仪器组合测量系统成为重要测量手段,得到广泛应用。如图1所示,多仪器组合测量系统中,各测量仪器在各自的仪器坐标系下进行测量,多台测量仪器通过一组测量公共测量点计算其外参数(坐标系旋转、平移转换参数)以将各仪器坐标系统一至系统坐标系;公共测量点由两台及以上测量仪器测得,其坐标由这些仪器的测量数据融合计算获得;非公共测量点仅由一台测量仪器测量测得,其坐标由该仪器的测量数据经该仪器的外参转换至系统坐标系下获得。综上,多仪器组合测量系统中不可避免地涉及各测量仪器的坐标系统一、公共测量点的数据融合,以及非公共测量点的数据转换的问题,为确保多仪器组合测量系统的量值统一、准确可靠,其外参数及坐标测量的测试不能直接套用单台测量仪器的校准方法(如《JJF 1242激光跟踪三维坐标测量系统校准规范》、《JJF 1408关节臂式坐标测量机校准规范》等),目前现有技术中多仪器组合测量系统的整体校准问题尚未解决。
发明内容
本发明为弥补现有单台测量仪器的校准方法不能直接应用于多仪器组合测量系统的校准的问题,提供一种多仪器组合测量系统的校准方法,通过分别测试多仪器组合测量系统的外参数、公共测量点坐标及非公共测量点坐标,确保多仪器组合测量系统的量值统一、准确可靠。
本发明采取以下技术方案:
一种多仪器组合测量系统的校准方法,采用多齿分度台作为标准器校准多仪器组合测量系统的坐标系旋转误差;采用带有激光干涉仪的直线导轨作为标准器校准多仪器组合测量系统的坐标系平移误差;采用长度标尺作为标准器校准多仪器组合测量系统的公共测量点和非公共测量点的空间距离长度误差。
优选的,多仪器组合测量系统的坐标系旋转误差校准包括以下步骤:
步骤一、由N台测量仪器组成的多仪器组合测量系统,将其中1台测量仪器固定在多齿分度台上,其余N-1台测量仪器固定在多齿分度台旁,N台测量仪器的整体布局与其现场应用时一致;
步骤二、多齿分度台刻度线归零,标定系统中N台测量仪器的外参数,将多齿分度台上的测量仪器的坐标系旋转矩阵记作R0;
步骤三、多齿分度台旋转角度θ,记录此时多齿分度台示值θ
步骤四、标定系统中N台测量仪器的外参数,重复三遍,将多齿分度台上的测量仪器的坐标系旋转矩阵记作R
步骤五、分别计算坐标系旋转矩阵R
其中,r
θ
其中,
Δθ
其中,j=1,2,3;
Δθ
步骤六、按照步进θ,依次旋转多齿分度台至示值θ
Δθ=max{Δθ
优选的,多仪器组合测量系统的坐标系平移误差校准包括以下步骤:
步骤一、由N台测量仪器组成的多仪器组合测量系统,将其中1台测量仪器固定在直线导轨的移动工作台上,其余N-1台测量仪器固定在直线导轨旁,N台测量仪器的整体布局与其现场应用时一致;
步骤二、激光干涉仪复位,标定系统中N台测量仪器的外参数,将移动工作台上的测量仪器的坐标系平移向量记作T
步骤三、移动工作台沿直线导轨移动位移d,记录此时激光干涉仪器的示值d
步骤四、标定系统中N台测量仪器的外参数,重复三遍,将移动工作台上的测量仪器的坐标系平移向量记作T
步骤五、分别计算坐标系平移向量T
其中,t
其中,j=1,2,3;
Δd
其中,j=1,2,3;
Δd
步骤六、按照步进d,依次沿直线导轨将移动工作台移至示值d
Δd=max{Δd
优选的,多仪器组合测量系统的公共测量点的空间长度示值误差校准包括以下步骤:
步骤一、由N台测量仪器组成的多仪器组合测量系统,按照与现场应用时一致的整体布局放置,在多仪器组合测量系统的测量范围内布置M根长度标尺,每根长度标尺的两端各安装有一个靶标座,可适配多仪器组合测量系统中的不同测量仪器的靶标,且保持测量点不随靶标类型改变而变动,长度标尺的方向包括水平、垂直、倾斜等不同方向;
步骤二、保证M根长度标尺两端的测量点均可被多仪器组合测量系统中2台及以上的测量仪器测得,将长度标尺两端的测量点作为公共测量点,配合其他公共测量点,标定多仪器组合测量系统的外参数并通过数据融合计算公共测量点的坐标;重复三遍,将第j遍中第i根长度标尺两端的公共测量点坐标分别记作(x
步骤三、利用坐标(x
其中,j=1,2,3;
Δl
其中,j=1,2,3;
Δl
步骤四、重复步骤三,依次计算剩余M-1根长度标尺处的空间长度示值误差Δl
Δl=max{Δl
进一步的,多仪器组合测量系统的非公共测量点的空间长度示值误差校准包括以下步骤:
步骤一、由N台测量仪器组成的多仪器组合测量系统,按照与现场应用时一致的整体布局放置,标定多仪器组合测量系统的外参数;
步骤二、在多仪器组合测量系统的测量范围内布置M根长度标尺,每根长度标尺的两端各安装有一个靶标座,可适配多仪器组合测量系统中的不同测量仪器的靶标,且保持测量点不随靶标类型改变而变动,长度标尺的方向包括水平、垂直、倾斜方向;
步骤三、多仪器组合测量系统对M根长度标尺进行测量,保证每根长度标尺的测量点均仅被一台测量仪器测量,且同一根长度标尺两端的测量点不被同一台测量仪器测量,即M根长度标尺上的测量点均为非公共测量点;根据多仪器组合测量系统的外参数完成数据转换,获得非公共测量点的坐标;重复三遍;将第j遍中第i根长度标尺两端的公共测量点坐标分别记作(x
步骤四、利用坐标(x
步骤五、重复步骤四,依次计算剩余M-1根长度标尺处的空间长度示值误差Δl
本发明的有益效果在于:针对外参数、公共测量点及非公共测量点的不同测试需求,提供一种系统的、可溯源的多仪器组合测量系统校准方法,弥补了现有单台测量仪器的校准方法不能直接应用于多仪器组合测量系统的校准的问题,保障了多仪器组合测量系统的量值统一、准确可靠,助力多仪器组合测量系统的研发升级和现场应用。
附图说明
图1是多仪器组合测量系统示意图。
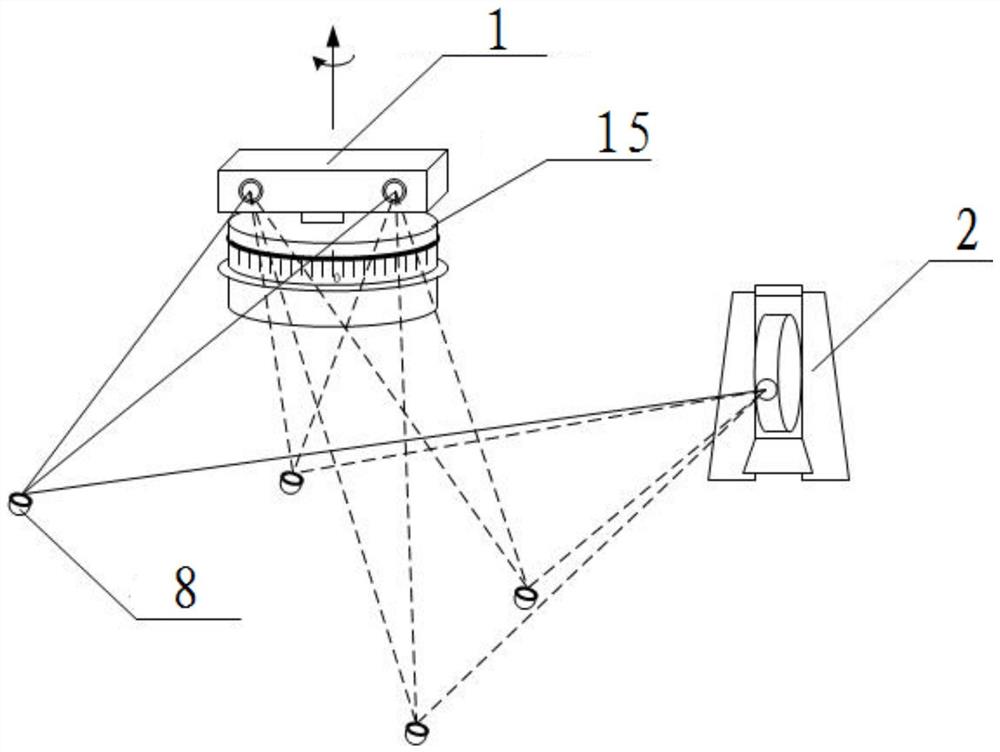
图2是多仪器组合测量系统的坐标系旋转误差校准示意图。
图3是多仪器组合测量系统的坐标系平移误差校准示意图。
图4是多仪器组合测量系统的公共测量点空间长度示值误差校准示意图。
图5是多仪器组合测量系统的非公共测量点空间长度示值误差校准示意图。
具体实施方式
下面结合实施例和附图对本发明的优选实施方式进行详细说明。
实施例一:
以由2台测量仪器组成的多仪器组合测量系统为例,多仪器组合测量系统的坐标系旋转误差校准如图2所示,包括以下步骤:
步骤一、将第一测量仪器固定在多齿分度台上,第二测量仪器固定在多齿分度台旁,2台测量仪器的整体布局与其现场应用时一致。
步骤二、多齿分度台刻度线归零,按照多仪器组合测量系统的操作手册标定系统中2台测量仪器的外参数,将多齿分度台上的测量仪器的坐标系旋转矩阵记作R
步骤三、多齿分度台旋转角度θ,记录此时多齿分度台示值θ
步骤四、按照多仪器组合测量系统的操作手册标定系统中2台测量仪器的外参数,重复三遍,将多齿分度台上的测量仪器的坐标系旋转矩阵记作R
步骤五、分别计算坐标系旋转矩阵R
其中,r
θ
其中,
Δθ
其中,j=1,2,3。
Δθ
步骤六、按照步进θ,依次旋转多齿分度台至示值θ
Δθ=max{Δθ
实施例二:
以由2台测量仪器组成的多仪器组合测量系统为例,多仪器组合测量系统的坐标系平移误差校准如图3所示,包括以下步骤:
步骤一、将第一测量仪器固定在直线导轨的移动工作台上,第二测量仪器固定在直线导轨旁,2台测量仪器的整体布局与其现场应用时一致。
步骤二、激光干涉仪复位,按照多仪器组合测量系统的操作手册标定系统中2台测量仪器的外参数,将移动工作台上的测量仪器的坐标系平移向量记作T
步骤三、移动工作台沿直线导轨移动位移d,记录此时激光干涉仪的示值d
步骤四、按照多仪器组合测量系统的操作手册标定系统中2台测量仪器的外参数,重复三遍,将移动工作台上的测量仪器的坐标系平移向量记作T
步骤五、分别计算坐标系平移向量T
其中,t
其中,j=1,2,3。
Δd
其中,j=1,2,3。
Δd
步骤六、按照步进d,依次沿直线导轨将移动工作台移至示值d
Δd=max{Δd
实施例三:
以由2台测量仪器组成的多仪器组合测量系统配合3根长度标尺为例,多仪器组合测量系统的公共测量点的空间长度示值误差校准如图4所示,包括以下步骤:
步骤一、由2台测量仪器组成的多仪器组合测量系统,按照与现场应用时一致的整体布局放置,在多仪器组合测量系统的测量范围内布置3根长度标尺,每根长度标尺的两端各安装有一个靶标座,可适配多仪器组合测量系统中的不同测量仪器的靶标,且保持测量点不随靶标类型改变而变动,长度标尺的方向包括水平、垂直、倾斜等不同方向。
步骤二、保证3根长度标尺两端的测量点均可被多仪器组合测量系统中2台的测量仪器测得,将长度标尺两端的测量点作为公共测量点,配合其他公共测量点,按照多仪器组合测量系统的操作手册标定多仪器组合测量系统的外参数并通过数据融合计算公共测量点的坐标。重复三遍。将第j遍中第i根长度标尺两端的公共测量点坐标分别记作(x
步骤三、利用坐标(x
其中,j=1,2,3。
Δl
其中,j=1,2,3。
Δl
步骤四、重复步骤三,依次计算剩余2根长度标尺处的空间长度示值误差Δl
Δl=max{Δl
实施例四:
以由2台测量仪器组成的多仪器组合测量系统配合3根长度标尺为例,多仪器组合测量系统的非公共测量点的空间长度示值误差校准如图5所示,包括以下步骤:
步骤一、由2台测量仪器组成的多仪器组合测量系统,按照与现场应用时一致的整体布局放置,按照多仪器组合测量系统的操作手册标定多仪器组合测量系统的外参数。
步骤二、在多仪器组合测量系统的测量范围内布置3根长度标尺,每根长度标尺的两端各安装有一个靶标座,可适配多仪器组合测量系统中的不同测量仪器的靶标,且保持测量点不随靶标类型改变而变动,长度标尺的方向包括水平、垂直、倾斜等不同方向。
步骤三、多仪器组合测量系统对3根长度标尺进行测量,保证每根长度标尺的测量点均仅被一台测量仪器测量,且同一根长度标尺两端的测量点不被同一台测量仪器测量,即3根长度标尺上的测量点均为非公共测量点。根据多仪器组合测量系统的外参数完成数据转换,获得非公共测量点的坐标。重复三遍。将第j遍中第i根长度标尺两端的公共测量点坐标分别记作(x
步骤四、利用坐标(x
步骤五、重复步骤四,依次计算剩余2根长度标尺处的空间长度示值误差Δl
附图1-5中的附图标记如下:
1第一测量仪器,
2第二测量仪器,
3第三测量仪器,
4第四测量仪器,
5第N-1测量仪器,
6第N测量仪器,
7被测工件,
8公共测量点,
9激光干涉仪,
10直线导轨,
11第一长度标尺,
12第二长度标尺,
13第三长度标尺,
14非公共测量点,
15多齿分度台,
16移动工作台。
- 一种多仪器组合测量系统的校准方法
- 一种成像仪器校准方法及成像仪器校准系统