用于无人机驱动的高精度双导程钢蜗轮减速器
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及一种减速正反向转动角度误差小于1角分的情况下大输出扭矩,并且能够有效地提高无人机驱动精度和使用寿命的一种用于无人机驱动的高精度双导程钢蜗轮减速器,属无人机减速器制造领域。
背景技术
CN109533015A、名称“一种汽车电动转向减速机构输出轴固定结构”,该固定结构包括输出轴蜗轮、蜗轮箱壳体、输出轴、轴承支撑座,输出轴蜗轮的两侧分别设置有输入侧轴承和输出侧轴承,轴承支撑座与蜗轮箱壳体紧固连接,输入侧轴承的外圈过盈压装在所述轴承支撑座内,输入侧轴承的内圈与输出轴过盈配合,输出侧轴承的外圈过盈压装在蜗轮箱壳体内,输出侧轴承的内圈与输出轴间隙配合,输出侧轴承的内圈的外侧通过轴承用挡圈与输出轴固定,输出侧轴承的内圈的内侧与输出轴蜗轮之间设有金属簧片,金属簧片的内圈与输出轴过盈配合,金属簧片的内圈与外圈之间的径向截面至少包括一段用于产生预紧力的倾斜面以及一段搭接面。其不足之处:一是正反向转动角度误差大于1角分,精度差;二是在同等条件下无法实现大输出扭矩,即无法实现大减速比;三是无法在保持高精度情况下,提高使用寿命,其使用高精度离不开人的掌握。
发明内容
设计目的:避免背景技术中的不足之处,设计一种减速正反向转动角度误差小于1角分的情况下大输出扭矩,并且能够有效地提高无人机驱动精度和使用寿命的一种用于无人机驱动的高精度双导程钢蜗轮减速器。
设计方案:为了实现上述设计目的。本发明在背景技术的基础上:1、采用申请制造的高精度双导程合金钢蜗轮减速器替代背景技术。 2、为了实现使用寿命内保持一角分的精度,本申请采用合金钢蜗轮替代铜制蜗轮,目的不仅能解决其磨耗问题,确保在设计寿命内保证1角分的精度。其次,由于合金钢蜗轮的蜗齿强度高,因而蜗轮的体积可以做的很小,当其相同材料的蜗杆啮合时,不仅能够实现大速比、大扭矩的输出,而且占用空间很小。
技术方案:一种用于无人机驱动的高精度双导程钢蜗轮减速器,包括无人机减速器,所述无人机中的减速器采用高精度双导程合金钢蜗轮减速器替代。
本发明与背景技术相比,经检测达到了如下技术指标:
附图说明
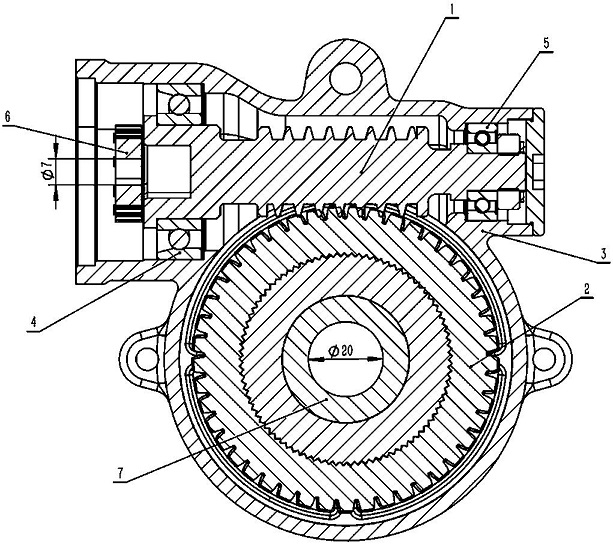
图1是高精度双导程钢蜗轮减速器示意图。
具体实施方式
实施例1:参照附图1。一种用于无人机驱动的高精度双导程钢蜗轮减速器,包括无人机减速器,所述无人机中的减速器采用高精度双导程合金钢蜗轮减速器替代。:所述高精度双导程合金钢蜗轮减速器中双导程蜗杆与合金钢蜗轮的啮合精度是双导程蜗杆德标5级,合金钢蜗轮德标6级。所述高精度双导程合金钢蜗轮减速器的正反向转动角度为0.5~0.8角分,正反转动角小于1角分原因:正反向转动角度误差对应蜗杆蜗轮的圆周啮合侧隙值,此值可以透过双导程齿部结构在组装蜗杆蜗轮时调整到需要的侧隙值,一般是往小调整,来满足需要的正反向转动角度误差。
所述高精度双导程合金钢蜗轮减速器体积为118.5mm×132.5mm×134mm,误差小于1mm,输出扭矩大于45N.m,输出扭矩等于输入扭矩乘以减速比,输入扭矩由电机端提供,减速比是蜗杆蜗轮提供,因为设计的蜗杆蜗轮减速比是45,所以电机端仅需提供大于1N.m的输入扭矩,即可满足输出扭矩45N.m以上的需求。
所述高精度双导程合金钢蜗轮减速能够90度转向。
其高精度双导程钢蜗轮减速器,所述高精度双导程合金钢蜗轮减速器中双导程蜗杆1内径与电机轴6配合,双导程蜗杆1透过大轴承4和小轴承5连接固定在箱体3上,双导程蜗杆1与双导程合金钢蜗轮2啮合动,双导程合金钢蜗轮2与输出轴7做内径配合,输出轴7输出扭力和转动。
需要理解到是:上述实施例虽然对本发明设计思路的作了详细的文字描述,但是这些文字的描述,只是对本发明设计思路的简单文字描述,而不是对本发明设计思路的限制,任何不超出本发明设计思路的组合、增加或修改,均落入本发明的保护范围内。
- 用于无人机驱动的高精度双导程钢蜗轮减速器
- 用于无人机驱动的高精度双导程钢蜗轮减速器