一种用于小型高轨卫星公用平台的推进系统
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及航空航天技术领域,特别涉及一种用于小型高轨卫星公用平台的推进系统。
背景技术
卫星在轨运行器件需要进行位置保持、姿态控制、轨道调增等任务。这些任务的实现均需要推进系统来提供力矩和推力,因此,推进系统的性能直接决定了卫星姿态控制力矩、轨道控制推力等,甚至会影响卫星姿态的控制精度以及卫星的在轨寿命。
推进系统中通常包括多个推力器,在很大程度上,推进系统的性能由推力器的布局决定。具体来说,所述推力器在星体上的安装位置与安装方向决定了每个推力器在卫星本体系中所能产生的力及力矩的大小和方向,而各个推力器作用的组合可产生所需的控制期望量,即推进系统的性能。
目前常用的推力器主要有电推力器以及化学推力器,其中电推力器比冲较高,而化学推力器的可靠性更佳。为了充分发挥两种不同推力器的优势,以在较大程度上提升卫星的可靠性以及适应多类型任务的灵活性,目前混合推进系统已成为国内外卫星平台的主要推进技术路线。国内外高轨通信卫星平台中,已有超过50%的卫星平台采用了混合推进系统,如洛克希德马丁公司的A2100平台、波音公司BSS-702MP/HP平台、泰雷兹的Al phaBus平台、中国东方红公司的DFH-4/DFH-5平台等。但这些卫星平台均为大型高轨卫星平台,主要应用化学推进变轨、电推进位保,难以适用于小型高轨卫星公用平台中。
发明内容
针对现有技术中的部分或全部问题,本发明提供一种用于小型高轨卫星公用平台的推进系统,包括布置于卫星底板舱外侧的若干个推力器,其中,所述推力器包括电推力器以及化学推力器。
进一步地,所述化学推力器包括两组,分别设置于卫星底板舱外侧的+X及-X向。
进一步地,所述电推力器包括两组,分别设置于卫星底板舱外侧的+Y及-Y向。
进一步地,任意一个化学推力器组包括:
一个变轨化学推力器,安装于支架上;以及
两个姿控化学推力器,安装于支架上,且对称分布于所述变轨化学推力器的两侧。
进一步地,任意一个化学推力器组中,所述变轨化学推力器的推力矢量指向卫星初始质心和定点后卫星质心的连线几何中心。
进一步地,任意一个化学推力器组中,所述变轨化学推力器的推力矢量与任一所述姿控化学推力器的推力矢量形成第一夹角,且两个姿控化学推力器的合力矢量与变轨化学推力器推力矢量重合。
进一步地,所述第一夹角为15°。
进一步地,任意一个电推力器组包括至少一个电推力器,且任一所述电推力器的推力矢量在第一锥形范围内可调,所述第一锥形的轴线与卫星Z轴形成第二夹角。
进一步地,任意一个电推力器组包括两个平行布置、互为备份的电推力器,且任一所述电推力器的推力矢量在第一锥形范围内可调,所述第一锥形的轴线与卫星Z轴形成第二夹角。
进一步地,所述第二夹角为30°,且所述第一锥形锥角为35°。
本发明提供的一种用于小型高轨卫星公用平台的推进系统,采用混合推力器布局,空间紧凑、布局高效、灵活可靠。针对变轨功能,其包括的变轨化学推力器既可以与两个姿控化学推力器互为备份,还可以与电推力器互为备份,同时针对姿态控制、在轨位保和动量卸载等功能,姿控化学推力器可与电推力器互为备份,使得小型高轨卫星公用平台在变轨、位保、卸载等方面均拥有极高的冗余能力和可靠性,适应小型高轨卫星公用平台的混合推进系统设计,为小型高轨卫星公用平台解决了柔性化配置、高性价比与高可靠性兼顾的难题。
附图说明
为进一步阐明本发明的各实施例的以上和其它优点和特征,将参考附图来呈现本发明的各实施例的更具体的描述。可以理解,这些附图只描绘本发明的典型实施例,因此将不被认为是对其范围的限制。在附图中,为了清楚明了,相同或相应的部件将用相同或类似的标记表示。
图1示出本发明一个实施例的一种用于小型高轨卫星公用平台的推进系统的结构示意图;
图2a示出本发明一个实施例的一种用于小型高轨卫星公用平台的推进系统的推力矢量示意图;
图2b示出本发明一个实施例的一种用于小型高轨卫星公用平台的推进系统的推力矢量在YOZ面的投影示意图;以及
图2c出本发明一个实施例的一种用于小型高轨卫星公用平台的推进系统的变轨推力器推力矢量在XOZ面的投影示意图。
具体实施方式
以下的描述中,参考各实施例对本发明进行描述。然而,本领域的技术人员将认识到可在没有一个或多个特定细节的情况下或者与其它替换和/或附加方法、材料或组件一起实施各实施例。在其它情形中,未示出或未详细描述公知的结构、材料或操作以免模糊本发明的发明点。类似地,为了解释的目的,阐述了特定数量、材料和配置,以便提供对本发明的实施例的全面理解。然而,本发明并不限于这些特定细节。此外,应理解附图中示出的各实施例是说明性表示且不一定按正确比例绘制。
在本说明书中,对“一个实施例”或“该实施例”的引用意味着结合该实施例描述的特定特征、结构或特性被包括在本发明的至少一个实施例中。在本说明书各处中出现的短语“在一个实施例中”并不一定全部指代同一实施例。
应当指出,各附图中的各组件可能为了图解说明而被夸大地示出,而不一定是比例正确的。在各附图中,给相同或功能相同的组件配备了相同的附图标记。
在本发明中,各实施例仅仅旨在说明本发明的方案,而不应被理解为限制性的。
在本发明中,除非特别指出,量词“一个”、“一”并未排除多个元素的场景。
在此还应当指出,在本发明的实施例中,为清楚、简单起见,可能示出了仅仅一部分部件或组件,但是本领域的普通技术人员能够理解,在本发明的教导下,可根据具体场景需要添加所需的部件或组件。
在此还应当指出,在本发明的范围内,“相同”、“相等”、“等于”等措辞并不意味着二者数值绝对相等,而是允许一定的合理误差,也就是说,所述措辞也涵盖了“基本上相同”、“基本上相等”、“基本上等于”。以此类推,在本发明中,表方向的术语“垂直于”、“平行于”等等同样涵盖了“基本上垂直于”、“基本上平行于”的含义。
对于小型高轨卫星公用平台而言,为控制制造成本,通常对于整体结构的紧凑型要求较高,需要做到空间紧凑、布局高效和灵活可靠,进而使得小型高轨卫星公用平台在变轨、位保、卸载等方面均能够拥有极高的冗余能力和可靠性。而现有的大型高轨卫星平台中,多采用化学推进变轨、电推进位保,无法充分发挥电推力器高比冲优势以及化学推力器高可靠性优势,因此,其难以适用于小型高轨卫星公用平台中。基于此,本发明提供一种用于小型高轨卫星公用平台的推进系统,其包括布置于卫星底板舱外侧的若干个推力器,且所述推力器包括电推力器以及化学推力器。
在本发明的一个实施例中,所述化学推力器包括两组,分别设置于卫星底板舱外侧的+X及-X向,所述电推力器则分别设置于卫星底板舱外侧的+Y及-Y向。其中所述化学推力器用于变轨控制以及姿态控制,所述电推力器与所述化学推力器互为备份。
在本发明的一个实施例中,任意一个化学推力器组包括至少一个变轨化学推力器以及两个姿控化学推力器,所述变轨化学推力器以及姿控化学推力器安装于同一个支架上,且所述姿控化学推力器对称分布于所述变轨化学推力器的两侧,具体而言,所述两个姿控化学推力器的推力矢量相对于所述变轨化学推力器的推力矢量对称,且其合力矢量与变轨化学推力器推力矢量重合。在本发明的一个实施例中,所述姿控化学推力器的合力矢量,即所述变轨化学推力器的推力矢量指向卫星初始质心和定点后卫星质心的连线几何中心。
在本发明的一个实施例中,所述电推力器的推力矢量在一个锥形范围内可调,卫星质心位于所述锥形范围内,且所述电推力器的推力矢量可以与卫星的Z轴平行。为保证系统的可靠性,在本发明的又一个实施例中,所述卫星底板舱外侧的+Y及-Y向分别布置有两个互为备份的电推力器,同一侧的两个电推力器平行布置,互为备份的同时,还可针对变轨功能,与变轨化学推力器互为备份,以及针对姿态控制、在轨位保和动量卸载等功能,与姿控化学推力器互为备份。
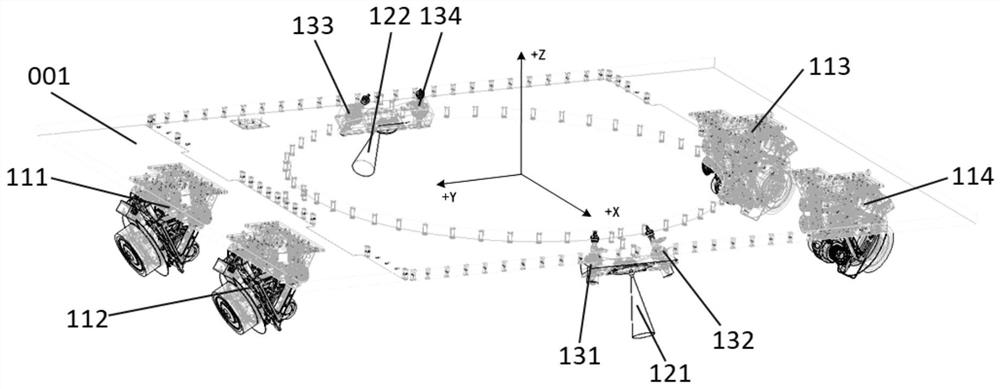
下面结合某具体实施例及其附图对本发明的方案做进一步描述。图1示出本发明一个实施例的一种用于小型高轨卫星公用平台的推进系统的结构示意图。如图1所示,一种用于小型高轨卫星公用平台的推进系统,包括安装于卫星底板舱001外侧的第一电推力器111、第二电推力器112、第三电推力器113、第四电推力器114、第一变轨化学推力器121、第二变轨化学推力器122、第一姿控化学推力器131、第二姿控化学推力器132、第三姿控化学推力器133以及第四姿控化学推力器134。其中:
所述第一变轨化学推力器121、第一姿控化学推力器131以及第二姿控化学推力器132共三个化学推力器组成一组,形成第一化学推力器组,布局于卫星+X侧,所述三个化学推力器安装在同一个支架上,且推力矢量在一个平面内,以及所述第二变轨化学推力器122、第三姿控化学推力器133以及第四姿控化学推力器134共三个化学推力器组成一组,形成第二化学推力器组,布局于卫星-X侧,所述三个化学推力器安装在同一个支架上,且推力矢量在一个平面内,每一个化学推力器组中,针对变轨功能,变轨化学推力器与两个姿控化学推力器可互为备份;以及
所述第一电推力器111及第二电推力器112平行布局于卫星底板舱外侧+Y向,以及所述第三电推力器113及第四电推力器114平行布局于卫星底板舱外侧-Y向。布局于+Y、-Y两侧的电推力器两两分别互为备份。同时,针对变轨功能,变轨化学推力器与电推力器互为备份;针对姿态控制、在轨位保和动量卸载等功能,姿控化学推力器与电推力器互为备份。
图2a-2c示出本发明一个实施例的一种用于小型高轨卫星公用平台的推进系统的推力矢量示意图及其在YOZ面、XOZ面的投影示意图。
如图2a-2c所示,所述推进系统中,各电推力器的推力矢量均在一个第一锥形范围内可调,其中,所述第一锥形的轴线与卫星的Z轴呈30度夹角,且所述第一锥形的锥角为35°。基于此,可以看出,所述第一锥形满足卫星的质心在该其范围内,且电推力器的推力矢量可与卫星Z轴平行。
如图2a-2c所示,所述推进系统中,任意一侧的化学推力器组中,两个姿控化学推力器推力矢量相对于变轨化学推力器推力矢量15度角对称,且两个姿控化学推力器的合力矢量与变轨化学推力器推力矢量重合。同时,两个姿控化学推力器推力的合力矢量与变轨化学推力器推力矢量,均指向卫星初始质心CM1和定点后卫星质心CM2的连线几何中心CM0。
本发明提供的一种用于小型高轨卫星公用平台的推进系统,采用混合推力器布局,空间紧凑、布局高效、灵活可靠。针对变轨功能,其包括的变轨化学推力器既可以与两个姿控化学推力器互为备份,还可以与电推力器互为备份,同时针对姿态控制、在轨位保和动量卸载等功能,姿控化学推力器可与电推力器互为备份,使得小型高轨卫星公用平台在变轨、位保、卸载等方面均拥有极高的冗余能力和可靠性,适应小型高轨卫星公用平台的混合推进系统设计,为小型高轨卫星公用平台解决了柔性化配置、高性价比与高可靠性兼顾的难题。应当理解的是,附图中示出的仅为本发明的一个实施例,在实际应用中,根据实际需求,所述电推力器和/或化学推力器的数量以及推力矢量方向均可进行相应的调整,并不局限于上述实施例中所述。
尽管上文描述了本发明的各实施例,但是,应该理解,它们只是作为示例来呈现的,而不作为限制。对于相关领域的技术人员显而易见的是,可以对其做出各种组合、变型和改变而不背离本发明的精神和范围。因此,此处所公开的本发明的宽度和范围不应被上述所公开的示例性实施例所限制,而应当仅根据所附权利要求书及其等同替换来定义。
- 一种用于小型高轨卫星公用平台的推进系统
- 小型高轨卫星公用平台的主架构