适用于水下作业的线驱动柔性机械臂
文献发布时间:2023-06-19 12:22:51
技术领域
本申请涉及机械领域,尤其是柔性机械臂领域,具体为一种适用于水下作业的线驱动柔性机械臂。
背景技术
近年来,随着技术的发展、应用场景的增加,对于柔性机械臂的需求也与日俱增。针对柔性机械臂,人们进行了大量的研究和改进。
例如,中国专利申请CN202110047548.1公开了蛇形臂连接结构及蛇形臂机器人,该蛇形臂连接结构包括万向节和多根连接绳,其中:所述万向节设置于蛇形机械臂中相邻两关节段之间,所述万向节包括第一连接环和第二连接环,所述第一连接环与一所述关节段连接,所述第二连接环与相邻另一所述关节段连接,所述第一连接环上开设有卡槽,所述第二连接环上与所述卡槽相对的位置上设置有连接杆,所述连接杆的一端与所述第二连接环连接,所述连接杆的另一端设置有球形的接头,所述接头能活动地嵌设于所述卡槽内;各所述连接绳沿所述关节段的周向排布,且各所述连接绳分别沿各所述关节段的排列方向串联穿过各所述关节段。
中国专利申请CN202011117086.8公开了一种模块组合式多自由度柔性机械臂,其包括呈蛇形蜿蜒串联的多个基础模块,每一基础模块包括关节单元、连杆单元和电机单元,关节单元为立方形壳体结构,电机单元设置在关节单元内部,且电机单元的输出端与连杆单元的一端连接,以驱动连杆单元单自由度旋转;连杆单元的另一端固定连接与该关节单元相邻的下一关节单元,且相邻两个基础模块的连杆单元呈90°布置,由此连续的四个基础模块即可形成一个可完成空间内任意方向转向的多自由度柔性关节。该结构能够实现多自由度控制,但其存在一定的局限性:1)每个电机单元需要进行单独控制,这就涉及电机单元的供电、信号排线,而如何避免线缆的缠绕也是一个大问题;2)载荷极小,这会极大限制机械臂的应用。
如何对柔性机械臂进行改进,以简化装置的结构,满足更多场景的需求,一直是科研人员孜孜以求的目标。为此,本申请的发明目的之一在于,对柔性机械臂结构进行优化。
进一步,现有的柔性机械臂主要基于陆上空间设计,对于能够满足水下应用的结构则研究较少,或防水结构过于复杂,难以满足实际应用的需求。为此,本申请的发明目的之二在于,使优化结构后的柔性机械臂能够满足水下作业的需求,且尽可能简化相应的防水结构。
发明内容
本申请的发明目的在于,提供一种适用于水下作业的线驱动柔性机械臂。本申请的机械臂采用线驱动方式,并对机械臂的结构进行了全新优化,改进后的柔性机械臂结构稳定、可靠,易于控制,能有效提升柔性机械臂的载荷,具有较高的应用价值和较好的应用前景。进一步,本申请通过对传动结构的改进,使得柔性机械臂需要采用密封的地方得到最大程度降低,能够满足水下作业应用场景的需求。
为了实现上述目的,本申请采用如下技术方案:
适用于水下作业的线驱动柔性机械臂,包括执行单元、支撑单元、驱动单元、连接组件、刚性组件;
所述执行单元包括工作端板、执行关节组件、固定端板、万向节,所述工作端板、执行关节组件、固定端板通过万向节依次相连并构成执行单元;
所述执行关节组件为N个,N为自然数且N≥2;每个执行关节组件由M个柔性臂关节构成,M为自然数且M≥1;
所述工作端板朝向固定端板的一侧设置有两个第一关节底座,所述第一关节底座相互平行设置,所述第一关节底座上设置有第一螺纹通孔,位于工作端板上的两个第一螺纹通孔采用同轴线设计;
将柔性臂关节的一面记为第一连接面,将柔性臂关节上与第一连接面相平行的一面记为第二连接面;所述第一连接面上、第二连接面上分别设置有两个第二关节底座,所述第二关节底座上设置有第二螺纹通孔;
单个柔性臂关节上,位于第一连接面上的两个第二关节底座上的第二螺纹通孔采用同轴线设计,位于第二连接面上的两个第二关节底座上的第二螺纹通孔采用同轴线设计,将第一连接面上的第二关节底座上第二螺纹通孔的轴线在第一连接面上的投影记为第一投影线,将第二连接面上的第二关节底座上第二螺纹通孔的轴线在第一连接面上的投影记为第二投影线,所述第一投影线与第二投影线所呈的夹角为90°;
所述固定端板朝向工作端板的一侧设置有两个第三关节底座,所述第三关节底座相互平行,所述第三关节底座上设置有第三螺纹通孔,位于固定端板上的两个第三螺纹通孔采用同轴线设计;
所述工作端板与相邻的柔性臂关节之间通过一个万向节与第一关节底座、第二关节底座的配合实现二自由度的转动连接,相邻两个柔性臂关节之间通过一个万向节与第二关节底座的配合实现二自由度的转动连接,所述固定端板与相邻的柔性臂关节之间通过一个万向节与第二关节底座、第三关节底座的配合实现二自由度的转动连接;
所述支撑单元包括电机箱体、密封板、连接电缆、水密插头、第一支座、第二支座、基线箱座,所述电机箱体呈两端开口的中空腔体,所述密封板分别设置在电机箱体的两端开口上且电机箱体与密封板构成驱动控制箱;
所述第一支座、第二支座分别为一组,所述第一支座与驱动控制箱相连且驱动控制箱能为第一支座提供支撑,所述第二支座与驱动控制箱相连且驱动控制箱能为第二支座提供支撑;
所述驱动单元包括驱动电机、主动轮、第一从动轮、第二从动轮、与第一从动轮相配合的第一驱动丝杠、与第二从动轮相配合的第二驱动丝杠、直线导轨、丝杠螺母,所述直线导轨、丝杠螺母分别为2个;
所述驱动电机设置在电机箱体的中空腔体内,所述驱动电机通过连接电缆与水密插头相连,所述驱动电机的输出轴与主动轮相连且驱动电机能带动主动轮转动;所述电机箱体上设置有与水密插头相配合的连接线孔,所述水密插头设置在连接线孔上;
所述第一支座、第二支座上分别设置有第二导向孔,所述第一支座为一组,所述第一支座与驱动控制箱相连且驱动控制箱能为第一支座提供支撑,所述第一驱动丝杠穿过第一支座且第一驱动丝杠能相对第一支座转动;
所述第二支座为一组,所述第二支座与驱动控制箱相连且驱动控制箱能为第二支座提供支撑,所述第二驱动丝杠穿过第二支座且第二驱动丝杠能相对第二支座转动;
所述第一从动轮、第二从动轮分别与主动轮相啮合,所述第一从动轮、第二从动轮对称设置在主动轮两侧且主动轮能带动第一从动轮、第二从动轮同步、同向、同速转动;
所述直线导轨与驱动控制箱相连且直线导轨能相对驱动控制箱保持静止,所述丝杠螺母分别设置在第一驱动丝杠、第二驱动丝杠上且丝杠螺母能分别沿第一驱动丝杠的轴向、第二驱动丝杠的轴向移动,所述丝杠螺母与直线导轨的滑块相连且直线导轨的滑块能对丝杠螺母进行限位;
所述第一驱动丝杠上的螺纹旋向与第二驱动丝杠的螺纹旋向相反,所述第一从动轮与第一驱动丝杠固定连接,所述第二从动轮与第二驱动丝杠固定连接且第一驱动丝杠上丝杠螺母的运动方向与第二驱动丝杠上丝杠螺母的运动方向相反;
沿工作端板至固定端板的方向,将执行关节组件依次记为第1个执行关节组件、……第i个执行关节组件、……第N个执行关节组件;i为自然数,i>1且i≤N;
所述工作端板上设置有1组穿孔组件,第i个执行关节组件的柔性臂关节上沿其径向由内向外依次设置有i组穿孔组件,所述固定端板沿其径向由内向外依次设置有N组穿孔组件;
单组穿孔组件由4个穿线孔构成,单组穿孔组件内的4个穿线孔均布于同一圆周上,其中相对的2个穿线孔位于第一投影线上并构成第一斜线孔组,另外相对的2个穿线孔位于第二投影线上并构成第二斜线孔组;
第i个执行关节组件的柔性臂关节上,沿柔性臂关节的径向由内向外的方向,将穿孔组件依次记为第1个穿孔组件、第2个穿孔组件、……、第i个穿孔组件;
沿固定端板的径向由内向外的方向,将穿孔组件依次记为第1个穿孔组件、……第i个穿孔组件、……第N个穿孔组件;
所述驱动单元、连接组件分别为2N个,一组驱动单元对应一组连接组件;每组连接组件由2根连接绳构成,连接组件内的2个连接绳分别与驱动单元内的2个丝杠螺母对应连接,所述驱动单元通过其内的第一驱动丝杠、第二驱动丝杠能带动与第一驱动丝杠上丝杠螺母相连的连接绳相对与第二驱动丝杠上丝杠螺母相连的连接绳朝相反方向运动;
第1个执行关节组件以工作端板作为第1连接端板,一组驱动单元内第一驱动丝杠上的丝杠螺母、第二驱动丝杠上的丝杠螺母与一组连接组件内的两根连接绳对应连接且一组驱动单元能带动与其配合的连接组件内两根连接绳反向运动;
所述基线箱座的一端与驱动控制箱相连且驱动控制箱能为基线箱座提供支撑,所述基线箱座的另一端与固定端板相连且基线箱座能为固定端板提供支撑;
两组连接组件依次穿过第二导向孔、固定端板上的第1个穿孔组件、执行关节组件内柔性臂关节上的第1个穿孔组件并与工作端板上第1个穿孔组件中的第一斜线孔组、第1个穿孔组件中的第二斜线孔组对应连接;
第i个执行关节组件以第i个执行关节组件内最靠近工作端板的柔性臂关节为第i连接端板,两组连接组件依次穿过第二导向孔、固定端板上的第i个穿孔组件、执行关节组件内柔性臂关节上的第i个穿孔组件并与第i连接端板上第i个穿孔组件中的第一斜线孔组、第i个穿孔组件中的第二斜线孔组对应连接;
所述刚性组件分别设置于工作端板与相邻的柔性臂关节之间、相邻两个柔性臂关节之间、固定端板与相邻的柔性臂关节之间且刚性组件能赋予执行单元刚性;
单组刚性组件由4个支撑弹簧构成;单个刚性组件内的4个支撑弹簧呈正方形布置,所述支撑弹簧套设于连接绳上。
所述电机箱体为两端开口的多边形或圆形管体。
所述电机箱体为两端开口的矩形管体,所述第一支座、第二支座分别为两个,所述第一支座分别与电机箱体的两端开口相连,所述第二支座分别与电机箱体的两端开口相连,所述第一支座、第二支座对称设置在电机箱体上。
所述第一支座、第二支座与驱动控制箱构成刚性支撑体,所述刚性支撑体沿竖直方向的投影呈工字型,所述第一驱动丝杠通过轴承与第一支座相连,所述第二驱动丝杠通过轴承与第二支座相连,所述第一驱动丝杠与第二驱动丝杠相互平行设置。
还包括防护组件,所述防护组件套在刚性支撑体上且防护组件与刚性支撑体之间采用静密封。
所述直线导轨平行设置在驱动控制箱外壁上。
所述支撑单元还包括电机固定板、联轴器、电机驱动板,所述电机固定板、联轴器、电机驱动板分别位于电机箱体的中空腔体内,所述电机固定板与电机箱体相连且电机固定板能为电机箱体提供支撑,所述驱动电机与电机固定板相连且电机固定板能为驱动电机提供支撑,所述驱动电机的输出轴通过联轴器与主动轮相连且驱动电机能带动主动轮转动,所述驱动电机与电机驱动板电连接且电机驱动板能控制驱动电机的转动,所述电机驱动板电连接通过连接电缆与水密插头相连。
所述驱动电机通过联轴器与主动轮相连,所述联轴器与密封板之间采用动密封,所述密封板与电机箱体之间采用静密封。
还包括与第二导向孔相配合的第二导向件,所述第二导向孔分别设置于靠近基线箱座一侧的第一支座、靠近基线箱座一侧的第二支座上,所述第二导向件设置在第二导向孔上,所述第二导向件内设置有与连接绳相配合的导向通孔且第二导向件的导向通孔靠近基线箱座的一端呈喇叭状开口;
所述基线箱座上设置有第三导向件,所述第三导向件设置在基线箱座上,所述第三导向件内设置有与连接绳相配合的导向通孔且第三导向件的导向通孔朝向第二导向件的一端呈喇叭状开口,所述第二导向件的喇叭状开口与第三导向件的喇叭状开口相互配合能减少连接绳的磨损。
所述工作端板、柔性臂关节、固定端板上分别设置有中心通孔,所述工作端板的中心通孔、柔性臂关节的中心通孔、固定端板的中心通孔依次连通并构成第一工作通道。
还包括抓取单元,所述抓取单元包括转动支座、并联底座、抓取连杆、C型抓杆、抓取电机、抓取绳、复位弹簧、抓取控制系统,所述转动支座为至少三个,所述转动支座均布于工作端板上且工作端板能为转动支座提供支撑,所述C型抓杆呈C型,所述C型抓杆的一端与转动支座铰接且C型抓杆能相对转动支座转动;所述抓取连杆的一端与并联底座铰接,所述抓取连杆的另一端与C型抓杆中部铰接且并联底座通过抓取连杆能带动C型抓杆相对转动支座转动;
所述抓取绳的一端与抓取电机相连且抓取电机能实现对抓取绳的收拢或放开,所述抓取绳的另一端穿过第一工作通道与并联底座相连且抓取电机依次通过抓取绳、并联底座、抓取连杆能带动C型抓杆相对转动支座转动以实现C型抓杆的合拢或松开操作;
所述复位弹簧设置于工作端板与并联底座之间且抓取连杆能为并联底座提供回复力;
所述抓取电机与抓取控制系统系统相连。
所述抓取电机、抓取控制系统分别设置在驱动控制箱内。
还包括探测单元,所述探测单元包括探测分析系统、检测探头、信号传输线,所述探测分析系统设置在驱动控制箱内,所述探测分析系统与信号传输线相连,所述信号传输线穿过第一工作通道与检测探头相连,所述检测探头穿过工作端板且检测探头位于工作端板外侧。
所述检测探头为摄像头、温度传感器、湿度传感器、红外传感器、光线传感器中的一种或多种。
所述柔性臂关节为片状且柔性臂关节呈类十字型。
所述工作端板与相邻的柔性臂关节之间、相邻两个柔性臂关节之间、固定端板与相邻的柔性臂关节之间分别设置有一组刚性组件;
在工作端板与相邻的柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第1个穿孔组件的连接绳上;在第1个执行关节组件内的相邻两个柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第1个穿孔组件的连接绳上;在第i个执行关节组件内的相邻两个柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第i个穿孔组件的连接绳上;在第i个执行关节组件内最靠近工作端板的柔性臂关节与第i-1个执行关节组件内最靠近固定端板的柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第i-1个穿孔组件的连接绳上;在固定端板与相邻的柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第N个穿孔组件的连接绳上。
还包括与支撑弹簧相配合的定位凸起,所述定位凸起分别设置在工作端板、柔性臂关节、固定端板上且定为凸起能对支撑弹性的径向运动进行限位。
所述定位凸起呈环状,所述定位凸起与工作端板之间、定位凸起与柔性臂关节之间、定位凸起与固定端板之间分别采用一体成型。
还包括绳连接件,所述连接绳与丝杠螺母之间通过绳连接件相连。
优选地,所述执行关节组件为3个,每个执行关节组件由7个柔性臂关节构成。
穿孔组件依次沿柔性臂关节的径向由内向外等间距分布;
第1个执行关节组件的柔性臂关节上设置有1组穿孔组件且第1个穿孔组件中的穿线孔与柔性臂关节的中心距离为r;
第i个执行关节组件的柔性臂关节上设置有i组穿孔组件,在第i个执行关节组件的柔性臂关节上,穿孔组件之间的间距为b,第i个穿孔组件中的穿线孔与柔性臂关节的中心距离为r+(i-1)b。
单个执行关节组件内柔性臂关节的直径相同,第1个执行关节组件内柔性臂关节的直径、……第i个执行关节组件内柔性臂关节的直径、……第N个执行关节组件内柔性臂关节的直径依次增大。
第1个执行关节组件内柔性臂关节的直径、……第i个执行关节组件内柔性臂关节的直径、……第N个执行关节组件内柔性臂关节的直径依次递增。
目前,通过线驱动实现形变的结构已有专利文献予以了报道。例如,中国专利申请CN98106723.9公开了一种改进的人工管状肌肉及其应用,该改进的人工管状肌肉由橡胶或其他高分子弹性材料和纤维制成管状结构,纤维不仅可以分布于管壁内,也可以分布在管壁外,管状肌肉的腔体沿轴向分隔成几段独立的腔体,每个腔体都由各自的耐压管道连接到控制阀,这些管道弯曲地分布于管状腔体内部。该方案中,采用纤维进行连接、驱动,但其强度较弱,无法用于机械臂中。
在现有技术中,关节段上的连接通孔通常沿关节段的周向均匀布置,例如CN202110047548.1、CN202010809885.5、CN201910748747.8。在设计之初,本申请的发明人也采用了连接通孔沿关节段的圆周周向均匀布置的设计。发明人在分析后发现,这种设计存在如下问题:1)机械臂不同关节段的尺寸保持一致,难以减小工作端关节段的尺寸;2)在一定程度上,增加了相应驱动设备的负载和能耗。为此,如何对结构进行改进,成为迫切需要解决的难题。
关于驱动结构,中国专利申请CN201910748747.8公开了基于闭环驱动绳索的超冗余联动柔性机械臂,包括机械臂组、驱动绳索组和驱动部,所述驱动部牵引所述驱动绳索组,所述驱动绳索组拉动所述机械臂组并使其摆动;所述驱动绳索组包括第一驱动绳索和第二驱动绳索,所述第一驱动绳索的首端和所述第二驱动绳索的首端分别与所述机械臂组连接;所述第一驱动绳索的末端与所述驱动部连接,所述第二驱动绳索的末端穿过绳索中转部与所述驱动部连接;所述绳索中转部使所述第二驱动绳索牵引所述机械臂组的方向和所述第一驱动绳索牵引所述机械臂组的方向相反。该结构采用驱动部与驱动绳索组一一对应的方式,对控制系统的要求较高,且整体结构较为复杂。
中国专利申请CN202020023159.6公开了一种具有柔性连杆的蛇形机械臂,该结构中,每个法兰周向设有四个均匀布置的穿孔,所述驱动单元包括两个转盘和两根牵引绳,两个转盘可转动的安装在支撑架上,每个转盘外一周设有凹槽,两根牵引绳的中部分别缠绕在两个转盘的凹槽内并固定在转盘上,其中一根牵引绳的两端分别依次穿过所有骨节法兰上的上下两个穿孔,并通过钢丝夹头夹紧在最后一个法兰上,另外一根牵引绳的两端分别依次穿过所有骨节法兰上的左右两个穿孔,并通过钢丝夹头夹紧在最后一个法兰上;每个转盘分别与一个旋转电机连接,两个旋转电机分别驱动两个转盘,两个转盘分别控制两根牵引绳的张紧和防松。该结构中,依靠转盘的凹槽与牵引绳相配合,实现机械臂的转动,这种结构最主要的问题在于,牵引绳与凹槽表面容易发生相对滑动,可靠性和稳定性有待改进。为此,需要采用更加稳定、可靠的驱动方式。
本申请对柔性机械臂的结构进行了全新的改进,其具有如下优点:
1)本申请对传动方式、支撑单元的结构进行了全新的优化设计,基于巧妙的刚柔一体化系统设计,用静密封代替了动密封,解决深水动密封难题;
2)本申请中,执行单元的工作端板、柔性臂关节、固定端板采用镂空结构设计,实现深水环境内外压强实时一致,解决深水环境抗压难题;
3)本申请中,执行单元的工作端板、柔性臂关节、固定端板采用镂空结构设计,为连接绳提供限位、设置通道,通过中心通孔形成第一工作通道,有效解决了线驱动的布线、干涉问题;
4)通过对柔性臂关节对角线的耦合相位差控制,减少驱动电机[mark01]数量,降低成本;
5)柔性机械臂的执行单元上无驱动电机设计,解决了传统机械臂的质量大、转动惯量大的滩题;
6)本申请中,穿孔组件的径向布置设计、柔性臂关节的类十字型结构设计、不同执行关节组件内柔性臂关节的变径设计,有效解决了柔性机械臂的负载难题,极大减轻了柔性机械臂的重量、增加了负载,有利于拓展其应用范围。
附图说明
本发明将通过例子并参照附图的方式说明,其中:
图1为实施例1中柔性机械臂的总体装配示意图。
图2为实施例1中执行单元与抓取单元结合的装配示意图。
图3为实施例1中驱动控制箱的装配示意图。
图4为实施例1中第一驱动丝杠的装配结构示意图。
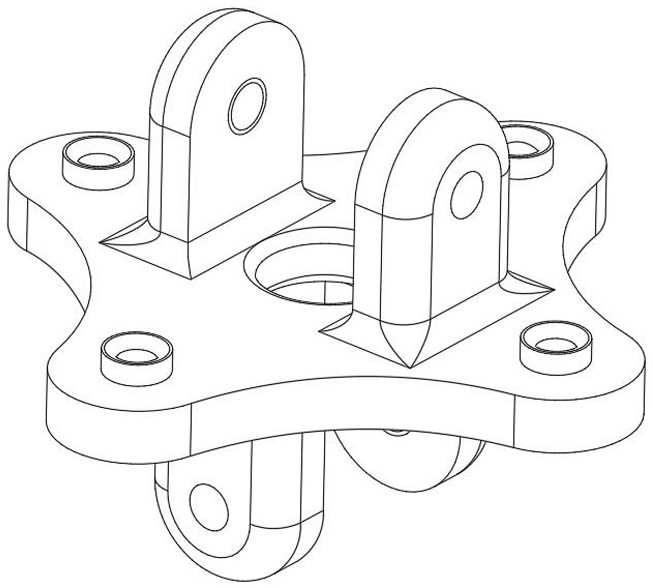
图5为实施例1中第3个执行关节组件内两个柔性臂关节的连接示意图。
图6为实施例1中第1个执行关节组件内柔性臂关节的示意图。
图7为实施例1中第2个执行关节组件内柔性臂关节的示意图。
图8为实施例1中第3个执行关节组件内柔性臂关节的示意图。
图中标记:1、执行单元,2、基线箱座,3、电机箱体,4、第一支座,5、密封板,6、C型抓杆,7、抓取连杆,8、转动支座,9、工作端板,10、执行关节组件,11、固定端板,12、电机驱动板,13、驱动电机,14、电机固定板,15、联轴器,16、格莱圈,20、连接线孔,21、第一从动轮,22、绳连接件,23、丝杠螺母,24、第一驱动丝杠,25、直线导轨,26、第二导向件,27、第二螺纹通孔,28、定位凸起,29、螺栓,30、穿线孔,31、第二关节底座,32、中心通孔,33、万向节。
具体实施方式
本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
本说明书中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
实施例1
本实施例的适用于水下作业的线驱动柔性机械臂包括执行单元、支撑单元、驱动单元、连接组件、刚性组件。
其中,执行单元包括工作端板、执行关节组件、固定端板、万向节,工作端板、执行关节组件、固定端板通过万向节依次相连并构成执行单元。本实施例中,执行关节组件为3个,每个执行关节组件由7个柔性臂关节构成。
工作端板朝向固定端板的一侧设置有两个第一关节底座,第一关节底座相互平行设置,第一关节底座上设置有第一螺纹通孔,位于工作端板上的两个第一螺纹通孔采用同轴线设计。
将柔性臂关节的一面记为第一连接面,将柔性臂关节上与第一连接面相平行的一面记为第二连接面;第一连接面上、第二连接面上分别设置有两个第二关节底座,第二关节底座上设置有第二螺纹通孔。单个柔性臂关节上,位于第一连接面上的两个第二关节底座上的第二螺纹通孔采用同轴线设计,位于第二连接面上的两个第二关节底座上的第二螺纹通孔采用同轴线设计,将第一连接面上的第二关节底座上第二螺纹通孔的轴线在第一连接面上的投影记为第一投影线,将第二连接面上的第二关节底座上第二螺纹通孔的轴线在第一连接面上的投影记为第二投影线,第一投影线与第二投影线所呈的夹角为90°。
固定端板朝向工作端板的一侧设置有两个第三关节底座,第三关节底座相互平行,第三关节底座上设置有第三螺纹通孔,位于固定端板上的两个第三螺纹通孔采用同轴线设计。
工作端板与相邻的柔性臂关节之间通过一个万向节与第一关节底座、第二关节底座的配合实现二自由度的转动连接,相邻两个柔性臂关节之间通过一个万向节与第二关节底座的配合实现二自由度的转动连接,固定端板与相邻的柔性臂关节之间通过一个万向节与第二关节底座、第三关节底座的配合实现二自由度的转动连接。
本实施例中,柔性臂关节为片状且柔性臂关节呈类十字型。沿工作端板至固定端板的方向,将执行关节组件依次记为第1个执行关节组件、第2个执行关节组件、第3个执行关节组件。工作端板上设置有1组穿孔组件,第1个执行关节组件的柔性臂关节上沿其径向由内向外依次设置有1组穿孔组件,第2个执行关节组件的柔性臂关节上沿其径向由内向外依次设置有2组穿孔组件,第3个执行关节组件的柔性臂关节上沿其径向由内向外依次设置有3组穿孔组件,固定端板沿其径向由内向外依次设置有3组穿孔组件。
单组穿孔组件由4个穿线孔构成,以柔性臂关节的中心为圆心,单组穿孔组件内的4个穿线孔均布于同一圆周上,其中相对的2个穿线孔位于第一投影线上并构成第一斜线孔组,另外相对的2个穿线孔位于第二投影线上并构成第二斜线孔组。
第3个执行关节组件的柔性臂关节上,沿柔性臂关节的径向由内向外的方向,将穿孔组件依次记为第1个穿孔组件、第2个穿孔组件、第3个穿孔组件。沿固定端板的径向由内向外的方向,将穿孔组件依次记为第1个穿孔组件、第2个穿孔组件、第3个穿孔组件。
优选地,本实施例中,穿孔组件依次沿柔性臂关节的径向由内向外等间距分布;第1个执行关节组件的柔性臂关节上设置有1组穿孔组件,且第1个穿孔组件中的穿线孔与柔性臂关节的中心距离为r;第3个执行关节组件的柔性臂关节上设置有3组穿孔组件,在第3个执行关节组件的柔性臂关节上,穿孔组件之间的间距为b,第2个穿孔组件中的穿线孔与柔性臂关节的中心距离为r+b,第3个穿孔组件中的穿线孔与柔性臂关节的中心距离为r+2b。单个执行关节组件内柔性臂关节的直径相同,第1个执行关节组件内柔性臂关节的直径、第2个执行关节组件内柔性臂关节的直径、第3个执行关节组件内柔性臂关节的直径依次递增。
本实施例中,支撑单元包括电机箱体、密封板、连接电缆、水密插头、第一支座、第二支座、基线箱座、电机固定板、联轴器、电机驱动板,电机箱体呈两端开口的矩形管体状,密封板分别设置在电机箱体的两端开口上且电机箱体与密封板构成驱动控制箱。
第一支座、第二支座分别为两个,第一支座分别与电机箱体的两端开口相连,第二支座分别与电机箱体的两端开口相连,第一支座、第二支座对称设置在电机箱体上。第一支座、第二支座与驱动控制箱构成刚性支撑体,刚性支撑体沿竖直方向的投影呈工字型。
驱动单元包括驱动电机、主动轮、第一从动轮、第二从动轮、第一驱动丝杠、第二驱动丝杠、直线导轨、丝杠螺母,直线导轨、丝杠螺母分别为2个。第一从动轮与第一驱动丝杠固定连接,第一从动轮能带动第一驱动丝杠转动,第二从动轮与第二驱动丝杠固定连接,第二从动轮能带动第二驱动丝杠转动。
驱动电机、电机固定板、联轴器、电机驱动板分别设置在电机箱体的中空腔体内。本实施中,采用的驱动电机其自身包括了电机、减速器、增量式编码器。电机固定板与电机箱体相连,且电机固定板能为电机箱体提供支撑。驱动电机与电机固定板相连,且电机固定板能为驱动电机提供支撑。驱动电机的输出轴通过联轴器与主动轮相连,且驱动电机能带动主动轮转动。驱动电机与电机驱动板电连接,且电机驱动板能控制驱动电机的转动;电机驱动板电连接通过连接电缆与水密插头相连。电机箱体上设置有与水密插头相配合的连接线孔,水密插头设置在连接线孔上。联轴器与密封板之间采用动密封,密封板与电机箱体之间采用静密封。
针对水下作业的需求,有必要针对机械臂防水性能进行设计。本实施例中,机械臂采用驱动电机后置式驱动,为保障驱动电机、电机驱动板等电子器件在水下环境稳定运行,设计了驱动控制箱。采用格莱圈密封驱动电机的输出轴,驱动控制箱边缘部分嵌入有密封条,既实现了电机箱体的密封,又保证了电机动力的稳定输出。
第一驱动丝杠通过轴承与第一支座相连,且第一驱动丝杠能相对第一支座转动。第二驱动丝杠通过轴承与第二支座相连,且第二驱动丝杠能相对第二支座转动;第一驱动丝杠与第二驱动丝杠相互平行设置。采用该结构,第一驱动丝杠上的丝杠螺母位于两块第一支座之间,第二驱动丝杠上的丝杠螺母位于两块第二支座之间;第一支座、第二支座能起到起到支撑、限位的作用。
第一从动轮、第二从动轮分别与主动轮相啮合,第一从动轮、第二从动轮对称设置在主动轮两侧且主动轮能带动第一从动轮、第二从动轮同步、同向、同速转动。
直线导轨为12个,两个直线导轨为一组且平行设置在驱动控制箱外壁上驱动控制箱能为直线导轨提供支撑。直线导轨包括直线滑轨、设置在直线滑轨上的滑块。丝杠螺母分别设置在第一驱动丝杠、第二驱动丝杠上,且丝杠螺母能分别沿第一驱动丝杠的轴向、第二驱动丝杠的轴向移动。同时,丝杠螺母与直线导轨的滑块相连,且直线导轨的滑块能对丝杠螺母进行限位。
本实施例中,第一驱动丝杠上的螺纹旋向与第二驱动丝杠的螺纹旋向相反,第一从动轮与第一驱动丝杠固定连接,第二从动轮与第二驱动丝杠固定连接。该结构中,在一个驱动单元内,主动轮同时驱动第一从动轮、第二从动轮同步、同向、同速转动,由于第一驱动丝杠上的螺纹旋向与第二驱动丝杠的螺纹旋向相反,使得第一驱动丝杠上丝杠螺母的运动方向与第二驱动丝杠上丝杠螺母的运动方向相反,即当第一驱动丝杠上丝杠螺母朝靠近主动轮的一侧运动时,第二驱动丝杠上丝杠螺母则朝远离主动轮的一侧运动。采用结构,能够减少电机的控制数量,降低柔性臂的成本。
本实施例中,驱动单元、连接组件分别为6个,一组驱动单元对应一组连接组件。每组连接组件由2根连接绳构成,连接组件内的2个连接绳分别与驱动单元内的2个丝杠螺母对应连接,驱动单元通过其内的第一驱动丝杠、第二驱动丝杠能带动与第一驱动丝杠上丝杠螺母相连的连接绳相对与第二驱动丝杠上丝杠螺母相连的连接绳朝相反方向运动。
本实施例中,基线箱座的一端与驱动控制箱相连,且驱动控制箱能为基线箱座提供支撑;基线箱座的另一端与固定端板相连,且基线箱座能为固定端板提供支撑。
第一支座、第二支座上分别设置有第二导向孔。优选地,还包括与第二导向孔相配合的第二导向件,第二导向孔分别设置于靠近基线箱座一侧的第一支座、靠近基线箱座一侧的第二支座上。
考虑到连接绳与接触部件之间相对运动时,会产生不同程度的摩擦、磨损,本申请为此进行了结构改进,使连接绳在一些转角处顺利过渡。本实施例中,第二导向件设置在第二导向孔上,第二导向件内设置有与连接绳相配合的导向通孔,且第二导向件的导向通孔靠近基线箱座的一端呈喇叭状开口。基线箱座上设置有第三导向件,第三导向件设置在基线箱座上。第三导向件内设置有与连接绳相配合的导向通孔,且第三导向件的导向通孔朝向第二导向件的一端呈喇叭状开口。该结构中,第二导向件的喇叭状开口与第三导向件的喇叭状开口相互配合,不仅能减少连接绳的磨损,且能避免连接绳卡住问题的发生,保证设备的稳定、可靠运行。
第1个执行关节组件以工作端板作为第一连接端板,一组驱动单元内第一驱动丝杠上的丝杠螺母、第二驱动丝杠上的丝杠螺母与一组连接组件内的两根连接绳对应连接,且一组驱动单元能带动与其配合的连接组件内两根连接绳反向运动。该结构中,在于第一连接端板相配合的驱动单元中,第一驱动丝杠上丝杠螺母的运动方向与第二驱动丝杠上丝杠螺母的运动方向相反,使得一根连接绳向靠近主动轮的一侧运动,另一根连接绳向远离主动轮的一侧运动,进而带动第1个执行关节组件朝相应的方向弯曲。
由于工作端板与两组连接组件、两组驱动单元配合,使得柔性机械臂的末端能向两个方向弯曲。具体地,针对第一连接端板,两组连接组件依次穿过第二导向孔、固定端板上的第1个穿孔组件、执行关节组件内柔性臂关节上的第1个穿孔组件并与工作端板上第1个穿孔组件中的第一斜线孔组、第1个穿孔组件中的第二斜线孔组对应连接。
第3个执行关节组件以第3个执行关节组件内最靠近工作端板的柔性臂关节为第三连接端板。两组连接组件依次穿过第二导向孔、固定端板上的第3个穿孔组件、执行关节组件内柔性臂关节上的第3个穿孔组件,并与第3连接端板上第3个穿孔组件中的第一斜线孔组、第3个穿孔组件中的第二斜线孔组对应连接。第2个执行关节组件以第2个执行关节组件内最靠近工作端板的柔性臂关节为第二连接端板,其他连接方式与第3个执行关节组件类似。
工作端板与相邻的柔性臂关节之间、相邻两个柔性臂关节之间、固定端板与相邻的柔性臂关节之间分别设置有一组刚性组件,且刚性组件能赋予执行单元刚性。本实施例中,单组刚性组件由4个支撑弹簧构成;单个刚性组件内的4个支撑弹簧呈正方形布置,支撑弹簧套设于连接绳上。
优选地,在工作端板与相邻的柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第1个穿孔组件的连接绳上;在第1个执行关节组件内的相邻两个柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第1个穿孔组件的连接绳上。在第3个执行关节组件内的相邻两个柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第3个穿孔组件的连接绳上;在第1、2个执行关节组件内的相邻两个柔性臂关节之间,也采用相同结构。在第3个执行关节组件内最靠近工作端板的柔性臂关节与第2个执行关节组件内最靠近固定端板的柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第2个穿孔组件的连接绳上;在第2个执行关节组件内最靠近工作端板的柔性臂关节与第1个执行关节组件内最靠近固定端板的柔性臂关节之间,也采用相同的结构。在固定端板与相邻的柔性臂关节之间,刚性组件内的支撑弹簧设于穿过第3个穿孔组件的连接绳上。
进一步,还包括与支撑弹簧相配合的定位凸起,定位凸起分别设置在工作端板、柔性臂关节、固定端板上且定为凸起能对支撑弹性的径向运动进行限位。定位凸起呈环状,定位凸起与工作端板之间、定位凸起与柔性臂关节之间、定位凸起与固定端板之间分别采用一体成型。进一步,还包括绳连接件,连接绳与丝杠螺母之间通过绳连接件相连。
本实施例中,工作端板、柔性臂关节、固定端板上分别设置有中心通孔,工作端板的中心通孔、柔性臂关节的中心通孔、固定端板的中心通孔依次连通并构成第一工作通道。
优选地,还包括防护组件,防护组件套在刚性支撑体上,且防护组件与刚性支撑体之间采用静密封。
本实施例中,执行单元由工作端板、三个执行关节组件、固定端板构成,每段执行关节组件可向任意方向弯曲,其由多个柔性臂关节组成,这些柔性臂关节是组成执行单元的最基本的单元。该结构中,刚性组件赋予执行单元一定的刚性,并能在连接绳的驱动下产生变形,具有良好的空间连续性。为此,发明人在仿真的基础上,制作了实物样品。
实际测试结果表明,本实施例的执行单元中,每个执行关节组件均能在连接绳的作用下进行灵活的弯曲,最大弯曲角度为100度。每个执行关节组件由两组连接组件连接(即四根连接绳进行连接)。总体上,整个机械臂共需要12根连接绳驱动。线驱动连续体机器人全长1545mm,其中驱动控制箱长度为891mm。
本实施例中,柔性臂关节采用十字铰链式关节结构,执行单元由十字铰链式关节依次串联而成,并且柔性臂关节之间采用支撑弹簧分隔开。支撑弹簧能保证机械臂每个柔性臂关节的均匀性,拟合常曲率弯曲状态,以及提高机械臂的可控性。
工作端板与相邻的柔性臂关节之间、相邻两个柔性臂关节之间、固定端板与相邻的柔性臂关节之间,通过螺栓与万向节的配合,形成两自由度的十字铰链结构,实现执行单元灵活的弯曲能力。
如图所示,本实施例还包括抓取单元。抓取单元包括抓取底板、转动支座、并联底座、抓取连杆、C型抓杆、抓取电机、抓取绳、复位弹簧、抓取控制系统。转动支座为四个,抓取底板与工作端板固定连接,转动支座均布于抓取底板。
本实施例中,C型抓杆呈C型,C型抓杆的一端与转动支座铰接,且C型抓杆能相对转动支座转动。抓取连杆的一端与并联底座铰接,抓取连杆的另一端与C型抓杆中部铰接,且并联底座通过抓取连杆能带动C型抓杆相对转动支座转动。该结构中,当四个C型抓杆向中心靠近时,能够实现对物体的抓取操作;反之,当四个C型抓杆远离中心时,实现抓取单元的松开操作。
抓取绳的一端与抓取电机相连,且抓取电机能实现对抓取绳的收拢或放开;抓取绳的另一端穿过第一工作通道与并联底座相连。该结构中,当抓取电机依次通过抓取绳、并联底座、抓取连杆能带动C型抓杆相对转动支座转动,以实现C型抓杆的合拢或松开操作。
复位弹簧设置于工作端板与并联底座之间,且抓取连杆能为并联底座提供回复力;抓取电机与抓取控制系统系统相连。
本实施例中,抓取电机、抓取控制系统分别设置在驱动控制箱内。
该结构中,抓取电机未工作时,C型抓杆在复位弹簧的弹力作用下,为张开状态。当需要抓取物体时,抓取电机带动抓取绳,使抓取绳拉紧并联底座,复位弹簧被压缩,从而带动四个C型抓杆合拢,抓紧目标物。抓取单元与工作端板之间通过螺栓联结,可快速更换损坏的四爪抓手或其他种类抓手。
本实施例中,抓取单元还可替换为探测单元。具体地,探测单元包括探测分析系统、检测探头、信号传输线,探测分析系统设置在驱动控制箱内,探测分析系统与信号传输线相连,信号传输线穿过第一工作通道与检测探头相连,检测探头穿过工作端板且检测探头位于工作端板外侧。本实施例中,检测探头为摄像头、温度传感器、湿度传感器、红外传感器、光线传感器中的一种或多种,从而满足多种探测的需要。
基于上述方案,本实施的柔性机械臂具有如下优点。
1、本实施例的柔性机械臂采用刚柔一体化机械系统综合设计,针对柔性臂的耐压性、密封性和轻量性等问题进行优化设计。柔性臂单级执行关节组件弯曲角度超过90°,三段执行关节组件具有“S”形运动和“O”形卷曲能力,且具有在水下100米深抓取2kg重量物体的作业能力。
2、柔索动运动学建模和仿真,通过MATLAB 和ADAMS 仿真验证运动学模型的可行性。采用三次曲线进行轨迹规划,使柔性臂具有优秀越避障能力。
3、多电机协调控制,通过对柔性臂各级执行关节组件对角线的耦合相位差控制,减少了控制电机数量,解决了柔性臂成本高的难题。
本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
- 适用于水下作业的线驱动柔性机械臂
- 一种适用于堆内构件水下自动视频检查的链式柔性机械臂