仿生下肢外骨骼构型及其人机耦合步态轨迹优化方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及一种仿生下肢外骨骼构型及其人机耦合系统步态轨迹优化方法,应用于下肢外骨骼设计与仿真领域。
背景技术
下肢外骨骼系统是近年来的研究热点,由人体、机械结构、传感设备、执行单元和计算中心共同组成,是人机工程学、机械、电子电力、计算机等学科的交叉产物,用来实现人机协同运动,达到延伸人体机能极限和感官维度的目的。穿戴式外骨骼应该是拟人化的,并且需要符合人体工程学。人体下肢生理构造的复杂性给外骨骼的仿生结构设计带来了严峻挑战,主要原因是人体骨骼结构、肌肉位置、运动习惯以及在各种情况下的关节力矩均是经过漫长进化自然选择的结果,这就导致利用现代化的科学技术实现与人体相同运动相同效果时需要慎重考虑结构尺寸、自由度布置、运动范围以及驱动关节位置设计等参数。
由于机械结构设计的局限性以及动力执行系统的限制,外骨骼构型设计需要在逼近人体生理构造和制造可行性之间做出合理的权衡,以保证兼容穿戴者的同时降低外骨骼设计制造的复杂性。拟人型外骨骼结构力求在运动学上精确地匹配穿戴者的各关节运动自由度,从而使得外骨骼能够具有与人体相同的运动空间,但以目前的通用技术,很难设计出和人体关节相一致的机械关节;非拟人型外骨骼构型的挑战难点是很难找到与人体下肢完全异构的设计来完美复现人体下肢的众多运动。伪拟人型结构则与前两者共享属性,其架构与拟人型相似但不完全相同。
发明内容
本发明的目的在于针对已有技术的不足,提供一种仿生下肢外骨骼构型及其人机耦合系统步态轨迹优化方法,为下肢外骨骼构型设计提供一种灵活可靠的结构设计方案,实现对穿戴者的下肢生理运动信息的准确感知。提供了一套通用的整体结构设计方案,包括仿生髋关节外骨骼、仿生膝关节外骨骼、仿生踝关节外骨骼三个主要部分。在实际运用中,可以根据实际外骨骼构型设计需求独立拆分出相应的部分,单独作为一个子系统使用。结合虚拟仿真技术搭建了由人体生理结构和外骨骼机械结构耦合构成的双链刚体仿真模型,利用遗传基因优化算法对人机耦合系统的步态轨迹进行了仿真实验研究,使人机耦合系统的步态轨迹更加接近自然状态。
为达到上述目的,本发明采用下述技术方案:
一种仿生下肢外骨骼构型包括仿生髋关节外骨骼、仿生膝关节外骨骼和仿生踝关节外骨骼三个主要部分,其特征在于:所述三个主要部分依次铰链构成仿生下肢外骨骼。
所述仿生髋关节外骨骼为三自由度髋关节外骨骼构型,采用关节串联式结构,包括腰部绑带、腰部固定架、背部固定架、髋展收连杆、屈伸连杆、髋内外旋连杆、大腿固定架以及大腿绑带,三个转动关节的中心轴线与生理关节的运动自由度轴线保持重合和平行而形成屈伸自由度、展收自由度和内外旋自由度;腰部绑带选用医疗康复中常用的腿部医用绑带,经过剪裁和缝制两幅绑带得到适配腰部尺寸的柔性固定绑带,腰部固定架为刚性腰部固定架,通过与腰部绑带内部夹合的方式用螺栓固定,在腰部固定架与髋展收连杆、髋展收连杆与髋屈伸连杆、髋屈伸连杆和髋内外旋连杆之间,顺次使用旋转式滑动变阻器进行转动副配置,最后将大腿固定架与大腿绑带通过内部夹合的方式螺栓固定。
一种仿生下肢外骨骼构型及其人机耦合步态轨迹优化方法,采用本发明仿生下肢外骨骼构型进行操作,操作步骤如下:
a.人机外骨骼耦合模型搭建:
按照成年人平均身高同步建立人体下肢刚体模型,并连外骨骼构型导入仿真环境下搭建人机外骨骼模型,并对其进行仿真分析;各转动组件包括单腿7+1个转动副,按照设计关系进行配置,为了能够比较真实地模拟外骨骼仿真,外骨骼的质量密度参数与所选用的聚乳酸材料相同,转动关节设置的阻尼系数和刚度系数均参考来自实物,即旋转式滑动变阻器;以所述构型导出相应的CAD格式之后,在MATLAB/Simscape Multibody仿真环境下搭建人机外骨骼模型,并对其进行仿真分析;
b.遗传算法步态轨迹优化:
利用仿真得到外骨骼各转动关节的信号,从相应的模块中观察到人体与外骨骼的各个关节的角度仿真结果;在经过一组遗传算法适应度参数共同作用下,外骨骼驱动人体下肢运动得到的髋关节、膝关节、和踝关节的关节轨迹曲线与CGA的轨迹曲线基本相似,只存在小角度偏差以及不顺滑现象。
优选地,在所述步骤b中,将外骨骼构型导入仿真环境下搭建人机外骨骼模型,并对其进行仿真分析,采用遗传算法步态轨迹优化,作以下假设:
b-1.左右腿的步态轨迹分别视作单腿的步态轨迹在滞后/超前半个步态周期的共同作用,即左右腿所使用的步态轨迹是相同的,一条腿滞后/超前另一条腿半个步态周期;
b-2.用i+1个关键点,将第K个步态周期划分成i小段,其中最后一个关键点表示第K 个步态周期的结束时刻,同时也表示第K+1个步态周期的起始时刻;
借助三次样条曲线的连续性,稳定性,顺滑性,对步态轨迹插值点进行多项式拟合,建立时间连续的轨迹,用三阶函数描述为以下公式:
θ(t)=a
其中,t表示两个相邻步态轨迹插值点之间的任一时刻;a
在遗传算法迭代过程中,用于评估每一个人机耦合系统步态轨迹效果的适应度评估方程如公式如下:
F=FitnessFunction(D,T,ω
其中,经历时间T表示在每一次耦合系统仿真模拟的终止时间;根据仿真过程中,检测到的一些故障或致命错误时提前终止仿真过程以节省仿真时间,并帮助防止优化中出现局部最优值;行走距离D表示在人机耦合仿真结束时刻;
足底接触力f
躯干角速度W
关节振荡度Agg,用来描述步态轨迹周期中的震荡次数,在步态轨迹上存在上下波动的拐点意味着人机耦合模型的关节会出现多次弯折,这显然是不符合自然行走的规律的,引入以下公式:
Agg=numE((θ
函数numE()表示满足内部条件的元素数量,如果步态轨迹有限状态机中的相邻两个元素符号相反,则表明步态轨迹在此时间间隔内存在波动,每次波动都会增加关节振荡度;其中θ
优选地,在所述步骤b中,在所述公式(6)中,N的取值为6。
本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著优点:
1.本发明仿生型外骨骼构型应用于下肢外骨骼研究领域,是一套通用的整体结构,包括仿生髋关节外骨骼、仿生膝关节外骨骼、仿生踝关节外骨骼三个主要部分;在实际运用中,可以根据实际外骨骼构型需求独立拆分出相应的部分,单独作为一个子系统使用;
2.本发明结合虚拟仿真技术搭建了由人体生理结构和外骨骼机械结构耦合构成的仿真模型,通过动力驱动的下肢外骨骼运动链带动人体下肢运动链,结合遗传基因算法进行优化步态轨迹规划,在一组特殊设计的适应度函数的优化下,为人机耦合模型设计了更接近自然的运动步态,为进一步动力外骨骼研究工作提供了更深入的了解。
附图说明
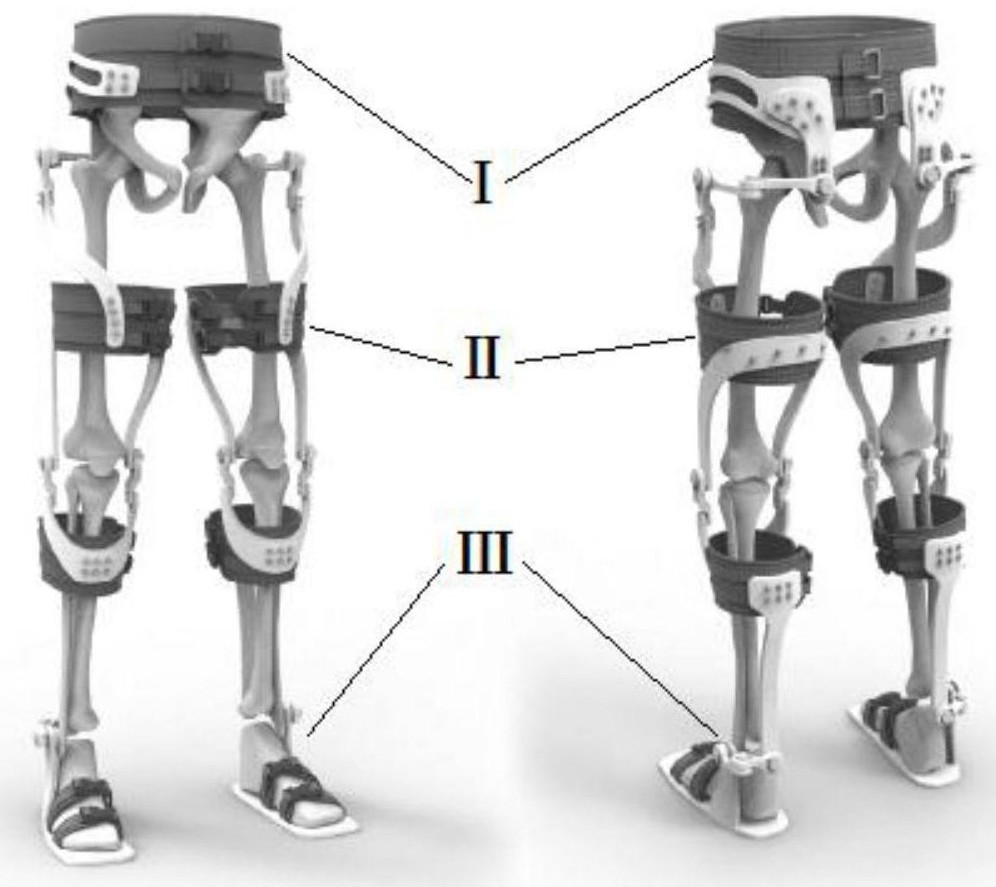
图1为本发明的仿生外骨骼构型整体结构示意图。
图2为本发明的髋关节生理结构与自由度分布图。
图3为本发明的仿生外骨骼髋关节构型结构示意图。
图4为本发明的膝关节生理结构与自由度分布图。
图5为本发明的仿生外骨骼膝关节构型设计示意图。
图6为本发明的踝关节生理结构与自由度分布图。
图7为本发明的仿生外骨骼踝关节构型结构示意图。
图8为本发明在MATLAB/Simscape Multibody中建立的联合仿真模型。
图9为本发明的人机外骨骼联合运动仿真图。
图10为本发明的人体左侧肢体三个主要关节的角度轨迹图。
图11为本发明的外骨骼左侧肢体三个主要关节的角度轨迹图。
具体实施方式
本发明的优选实施例结合附图详述如下:
实施例一:
参见图1~图7,一种仿生下肢外骨骼构型,包括仿生髋关节外骨骼Ⅰ、仿生膝关节外骨骼Ⅱ和仿生踝关节外骨骼Ⅲ三个主要部分,其特征在于:所述三个主要部分依次铰链构成仿生下肢外骨骼。
在本实施例中,所述仿生髋关节外骨骼Ⅰ为三自由度髋关节外骨骼构型,采用关节串联式结构,包括腰部绑带1、腰部固定架2、背部固定架、髋展收连杆3、屈伸连杆4、髋内外旋连杆5、大腿固定架6以及大腿绑带7,三个转动关节的中心轴线与生理关节的运动自由度轴线保持重合和平行而形成屈伸自由度、展收自由度和内外旋自由度;腰部绑带1选用医疗康复中常用的腿部医用绑带,经过剪裁和缝制两幅绑带得到适配腰部尺寸的柔性固定绑带,腰部固定架2为刚性腰部固定架,通过与腰部绑带1内部夹合的方式用螺栓固定,在腰部固定架2与髋展收连杆3、髋展收连杆3与髋屈伸连杆4、髋屈伸连杆4和髋内外旋连杆5之间,顺次使用旋转式滑动变阻器进行转动副配置,最后将大腿固定架6与大腿绑带7通过内部夹合的方式螺栓固定。
所述仿生髋关节外骨骼Ⅰ为关节串联式三自由度髋关节:人体髋关节在生理上是由盆骨处凹状的髋臼以及股骨头凸端构成的类似于球形铰链的结构,具有内在稳定性,如图2所示。将人体髋关节视作三自由度的简化关节模型,包含屈曲/伸展自由度、外展/内收自由度、内旋 /外旋自由度。基于以上分析,所设计的三自由度髋关节外骨骼构型如图3所示,髋关节主要采用关节串联式设计,其中包含:腰部绑带、腰部固定架、背部固定架、展收连杆、屈伸连杆、内外旋连杆、大腿固定架以及大腿绑带组成。三个转动关节的中心轴线与图2中的运动自由度轴线保持重合(屈伸自由度、展收自由度)和平行(内外旋自由度)。
在本实施例中,仿生膝关节外骨骼Ⅱ采用双侧冗余半包围式构型,包括兼顾承接上方髋关节零件的大腿绑带7、大腿后侧固定架8、小腿前侧固定架9、膝关节屈曲连杆10和小腿绑带11,大腿后侧固定架8采用内部夹合的方式螺栓固定在大腿绑带7上,小腿前侧固定架 9与小腿绑带11通过内部夹合的方式相连接;大腿后侧固定架8以及小腿前侧固定架9从左右两侧包裹腿部,并通过膝关节屈曲连杆10与旋转式滑动变阻器形成转动副,对侧屈伸连杆完全包裹膝关节并与膝关节相对齐。
仿生膝关节外骨骼Ⅱ为双侧冗余半包围式单自由度膝关节:膝关节由股骨远端、胫骨近端、腓骨近端以及髌骨共同组成,如图4所示,在关节分类中,膝关节实际上是滑膜关节,其运动形式并非简单的绕轴的转动,而是由滚动、滑动、旋转等运动组合而成的,大多数研究工作选择膝关节的主要屈曲/伸展自由度作为近似替代运动形式。基于单自由度膝关节定义,所设计的膝关节外骨骼构型如图5所示,为了保证穿戴的稳固性,膝关节外骨骼构型方案主要采用双侧冗余半包围式构型设计。包含:承接上方髋关节零件的大腿绑带、大腿后侧固定架、小腿前侧固定架、膝关节屈曲连杆、小腿绑带。大腿后侧固定架以及小腿前侧固定架从左右两侧包裹腿部,增加与绑带的贴合面积,对侧屈伸连杆完全包裹膝关节以保证与生理关节相对齐。
在本实施例中,所述仿生踝关节外骨骼Ⅲ为关节串联式三自由度踝关节,包括小腿后侧固定架12、踝展收连杆13、踝屈伸连杆14、和踝内外旋连杆15、足底承托件16、小腿绑带 11和脚掌绑带17三个转动关节的中心轴线与生理关节的运动自由度轴线保持重合和平行形成屈伸自由度、展收自由度和内外旋自由度;小腿后侧固定架12采用内部夹合的方式螺栓固定在小腿绑带11上,在踝展收连杆13与踝屈伸连杆14、踝屈伸连杆14和踝内外旋连杆15,踝展收连杆13与足底承托件16之间,顺次使用旋转式滑动变阻器进行转动副配置,最后将脚掌绑带17缝制在足底承托件16上。
所述仿生踝关节外骨骼Ⅲ为关节串联式三自由度踝关节:如图6所示,踝关节由胫骨远端、腓骨远端以及脚掌分布的骨骼群构成,为了简化表述,图中以单个近似脚掌代替脚掌骨骼群,踝关节的屈曲/伸展自由度是主要的运动,外展/内收自由度主要负责实现行走侧向平衡的调整作用,内旋/外旋自由度主要负责与髋关节共同完成转体运动。按照三自由度踝关节分析,踝关节外骨骼构型设计方案如图7所示,与髋关节设计类似,采用关节串联式设计,包括:小腿后侧固定架、踝转角连杆、足底承托件、小腿绑带、脚掌绑带。三个转动关节的中心轴线与图6中的运动自由度轴线保持重合(屈伸自由度、展收自由度)和平行(内外旋自由度)。
本实施例根据实际外骨骼构型设计需求独立拆分出相应的部分,单独作为一个子系统使用,结合虚拟仿真技术搭建了由人体生理结构和外骨骼机械结构耦合构成的双链刚体仿真模型,结构合理;本实施例从伪拟人构型思路出发,设计了仿人型外骨骼构型,以实现灵活对人体关节的助力和准确的信息感知。
实施例二:
本实施例与实施例一基本相同,特别之处如下:
一种仿生下肢外骨骼构型及其人机耦合步态轨迹优化方法,采用实施例一的仿生下肢外骨骼构型进行操作,操作步骤如下:
a.人机外骨骼耦合模型搭建:
按照成年人平均身高1.69米同步建立人体下肢刚体模型,躯干宽度0.35米,大腿长度 0.42米,小腿长度0.4米,脚掌长度0.21米,并连外骨骼构型导入仿真环境下搭建人机外骨骼模型,并对其进行仿真分析;各转动组件包括单腿7+1个转动副,按照设计关系进行配置,为了能够比较真实地模拟外骨骼仿真,外骨骼的质量密度参数与所选用的聚乳酸材料相同,转动关节设置的阻尼系数和刚度系数均参考来自实物,即旋转式滑动变阻器;以所述构型导出相应的CAD格式之后,在MATLAB/Simscape Multibody仿真环境下搭建人机外骨骼模型,并对其进行仿真分析;为了能够比较真实地模拟外骨骼仿真,外骨骼的质量密度参数与所选用的聚乳酸材料相同,转动关节设置的阻尼系数和刚度系数均参考来自实物(旋转式滑动变阻器);
b.遗传算法步态轨迹优化:
利用仿真得到外骨骼各转动关节的信号,从相应的模块中观察到人体与外骨骼的各个关节的角度仿真结果;在经过一组遗传算法适应度参数共同作用下,外骨骼驱动人体下肢运动得到的髋关节、膝关节、和踝关节的关节轨迹曲线与CGA的轨迹曲线基本相似,只存在小角度偏差以及不顺滑现象。其主要原因可能是:
1)由于在仿真环境下,人体与外骨骼的耦合方式为刚性连接,由于在运动过程中出现的冲击没有柔性原件参与吸收冲击能;
2)人体结构与外骨骼结构存在相异性,从整体的结果来看,外骨骼所测量得到的关节轨迹曲线与人体的运动轨迹相当,基本能够满足人体运动轨迹的需求,通过以上仿真结果证明了仿生外骨骼构型及其耦合系统步态轨迹优化方法的有效性与合理性。
遗传基因算法是一种启发式搜索优化方法,被广泛应用于各种优化问题中。人机耦合系统的运动是从外骨骼机器人运动链传递到被动的人体运动链的,利用遗传算法可以寻找适合人机耦合系统的关节运动轨迹最优解。步行是由双腿交替产生的周期性及对称性运动,这里对作以下假设:
(1)左右腿的步态轨迹分别视作单腿的步态轨迹在滞后/超前半个步态周期的共同作用,换句话说,左右腿所使用的步态轨迹是相同的,只不过是一条腿滞后/超前另一条腿半个步态周期的表现;
(2)用i+1个关键点,将第K个步态周期划分成i小段,其中最后一个关键点表示第K个步态周期的结束时刻,同时也表示第K+1个步态周期的起始时刻;
借助三次样条曲线的连续性,稳定性,顺滑性,对步态轨迹插值点进行多项式拟合,建立时间连续的轨迹,用三阶函数描述为以下公式:
θ(t)=a
其中,t表示两个相邻步态轨迹插值点之间的任一时刻。a
在遗传基因算法中,适应度评估方程是最重要的一部分,它决定了遗传基因算法能否在解空间中找到最优解。根据仿真实验过程中得到的结果设计了一组逐渐改善的适应度评估方程,以此作为遗传基因算法产生最优步态轨迹的目标,也即在特定的步态轨迹下人机耦合模型能够稳定的行走,同时让其行走的距离越远越好。在遗传算法迭代过程中,用于评估每一个人机耦合系统步态轨迹效果的适应度评估方程如公式如下:
F=FitnessFunction(D,T,ω
其中,经历时间T表示在每一次耦合系统仿真模拟的终止时间。根据仿真过程中,检测到的一些故障或致命错误时提前终止仿真过程以节省仿真时间,并帮助防止优化中出现局部最优值。行走距离D表示在人机耦合仿真结束时刻,躯干中心沿着前进方向移动的距离,距离越远越好,能够为遗传算法在解空间中寻找更优解提供更大帮助。
足底接触力f
躯干角速度W
关节振荡度Agg,用来描述步态轨迹周期中的震荡次数,在步态轨迹上存在上下波动的拐点意味着人机耦合模型的关节会出现多次弯折,这显然是不符合自然行走的规律的,因此引入以下公式:
Agg=numE((θ
函数numE()表示满足内部条件的元素数量,如果步态轨迹有限状态机中的相邻两个元素符号相反,则表明步态轨迹在此时间间隔内存在波动,每次波动都会增加关节振荡度。其中θ
本实施例方法结合虚拟仿真技术搭建了由人体生理结构和外骨骼机械结构耦合构成的仿真模型,通过动力驱动的下肢外骨骼运动链带动人体下肢运动链,结合遗传基因算法进行优化步态轨迹规划,在一组特殊设计的适应度函数的优化下,为人机耦合模型设计了更接近自然的运动步态,为进一步动力外骨骼研究工作提供了更深入的了解。
实施例三:
本实施例与上述实施例基本相同,特别之处如下:
所述仿生髋关节外骨骼Ⅰ为关节串联式三自由度髋关节:
采用关节串联式的三自由度髋关节构型,用于实现人体髋关节的屈曲/伸展自由度、外展 /内收自由度、内旋/外旋自由度。腰部绑带选用医疗康复中常用的腿部医用绑带,经过剪裁和缝制两幅绑带得到适配腰部尺寸的柔性固定绑带1,刚性腰部固定架2通过与腰部绑带1内部夹合的方式用螺栓固定,在腰部固定架2与髋展收连杆3、髋展收连杆3与髋屈伸连杆4、髋屈伸连杆4和髋内外旋连杆5之间,顺次使用旋转式滑动变阻器进行转动副配置,最后将大腿固定架6与大腿绑带7通过内部夹合的方式螺栓固定。
所述仿生膝关节外骨骼Ⅱ为双侧冗余半包围式单自由度膝关节:
采用关节双侧冗余半包围式单自由度膝关节构型,用于实现人体膝关节的屈曲/伸展自由度。大腿后侧固定架8同样采用内部夹合的方式螺栓固定在大腿绑带7上,小腿前侧固定架 9与小腿绑带11也通过内部夹合的方式相连接。大腿后侧固定架8以及小腿前侧固定架9从左右两侧包裹腿部,并通过膝关节屈曲连杆10与旋转式滑动变阻器形成转动副,对侧屈伸连杆完全包裹膝关节并与膝关节相对齐。
所述仿生踝关节外骨骼Ⅲ关节串联式三自由度踝关节:
采用关节串联式三自由度踝关节构型,用于实现人体踝关节的屈曲/伸展自由度、外展/ 内收自由度、内旋/外旋自由度。小腿后侧固定架12采用内部夹合的方式螺栓固定在小腿绑带11上,在踝展收连杆13与踝屈伸连杆14、踝屈伸连杆14和踝内外旋连杆15,踝展收连杆13与足底承托件16之间,顺次使用旋转式滑动变阻器进行转动副配置,最后将脚掌绑带 17缝制在足底承托件16上。
本实施例根据实际外骨骼构型设计需求独立拆分出相应的部分,单独作为一个子系统使用,结合虚拟仿真技术搭建了由人体生理结构和外骨骼机械结构耦合构成的双链刚体仿真模型,结构合理。
实施例四:
一种仿生下肢外骨骼构型及其人机耦合步态轨迹优化方法,采用上述构型进行操作,其特征在于:操作步骤如下:
1)、人机外骨骼耦合模型搭建:
根据发明内容d在MATLAB/Simscape Multibody(版本为:R2019A)仿真环境下搭建相应的人机耦合模型,并根据发明内容e所描述的具体观测信号配置相应的仿真模块。
2)、遗传算法步态轨迹优化结果分析:
根据说明书的发明内容e进行了仿人型外骨骼构型与人体运动学匹配的效果的验证分析,将上述所设计的构型导入仿真环境下搭建人机外骨骼模型,并对其进行仿真分析。利用仿真得到外骨骼各转动关节的信号,如图8和图9所示。仿真结束后可以从相应的模块中观察到人体与外骨骼的各个关节的角度仿真结果如图10和图11所示。从图10和图11中可以观察到,外骨骼测量得到的髋关节、膝关节、和踝关节的关节轨迹曲线与人体各关节的轨迹曲线基本相似,只不过存在些许的角度偏差以及不顺滑现象。其主要原因可能是:
1)由于在仿真环境下,人体与外骨骼的耦合方式为刚性连接,由于在运动过程中出现的冲击没有柔性原件参与吸收冲击能;
2)人体结构与外骨骼结构存在相异性,从整体的结果来看,外骨骼所测量得到的关节轨迹曲线与人体的运动轨迹相当,基本能够满足人体运动轨迹的需求,通过以上仿真结果证明了仿生外骨骼构型及其耦合系统步态轨迹优化方法的有效性与合理性。
本实施例仿生下肢外骨骼构型及其人机耦合步态轨迹优化方法采用仿生下肢外骨骼构型,包括仿生髋关节外骨骼、仿生膝关节外骨骼和仿生踝关节外骨骼三个主要部分。结合虚拟仿真技术搭建了由人体生理结构和外骨骼机械结构耦合构成的双链刚体仿真模型,利用遗传基因优化算法对人机耦合系统的步态轨迹进行了仿真实验研究,使人机耦合系统的步态轨迹更加接近自然状态。结合虚拟仿真技术搭建了由人体生理结构和外骨骼机械结构耦合构成的仿真模型,通过动力驱动的下肢外骨骼运动链带动人体下肢运动链,结合遗传基因算法进行优化步态轨迹规划,在一组特殊设计的适应度函数的优化下,为人机耦合模型设计了更接近自然的运动步态,为进一步动力外骨骼研究工作提供了更深入的了解。
上面对本发明实施例结合附图进行了说明,但本发明不限于上述实施例,还可以根据本发明的发明创造的目的做出多种变化,凡依据本发明技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的,只要不背离本发明的技术原理和发明构思,都属于本发明的保护范围。
- 仿生下肢外骨骼构型及其人机耦合步态轨迹优化方法
- 基于深度强化学习的无人机轨迹优化方法、装置和无人机