一种面向动态不确定网络的时延最小路由算法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明属于通信技术领域,尤其涉及一种面向动态不确定网络的时延最小路由算法。
背景技术
随着互联网规模的增加和技术的提高,人们对信息获取需求的不断增加,移动通信技术在通信领域中起到至关重要的作用,移动通信网络的应用越来越广泛。在移动通信网中,时延是网络服务质量的重要指标之一,描述了数据从源节点出发经过多个通信链路到达目的节点所需的时间,可以分为传输时延、传播时延、处理时延和排队时延。其中处理时延是指主机或路由器对数据进行处理所需的时间;传播时延是指信号在传输通道上传播一定距离需要花费的时间,主要取决于链路的长度;传输时延是指主机或路由器以一定速率发送数据所需要的时间,主要取决于信道的带宽;排队时延是数据发送前在发送队列中排队的时间,取决于网络的拥塞状况。
以卫星通信网络为例,这类网络在设计中为了保证低时延,带宽设计裕量充足,因而通常可以忽略传输时延和排队时延。这样,网络端到端时延就主要取决于传播时延和处理时延。由于卫星通信网络呈现动态周期性变化,网络的链路长度也呈周期性变化,因而其传播时延可以视作随时间变化的确定性变量。考虑到卫星通信网络部署前难以真实模拟在轨状态,其处理时延具有不确定性特征,属于不确定性变量。为了保证服务质量,时延最小是重要的路由目标。确定时延最小路由时,通常把网络节点和链路抽象成拓扑,并将处理时延和传播时延相加赋权到链路上,此时链路时延是一个动态不确定性变量。为了对这类含动态不确定性变量的网络计算时延最小路由,俞峰
下面介绍一些相关的不确定理论的知识。
不确定测度:设Γ是一个非空集合,
公理1(规范性)对于全集Γ,有
公理2(对偶性)对于任意事件Λ,有
公理3(次可加性)对于一列可数的事件序列Λ
公理4(乘积公理)令
不确定变量:设ξ是从不确定空间
不确定分布:一个不确定变量ξ的不确定分布Φ被定义为Φ(x)={ξ≤x},其中x为任意实数。
不确定运算法则:假设ξ
本发明假设所有给定的不确定分布都是正则的。否则,可以给不确定分布一个小的扰动,使得它变成正则的。
发明内容
为了解决上述已有技术存在的不足,本发明提出一种面向动态不确定网络的时延最小路由算法,本发明的具体技术方案如下:
一种面向动态不确定网络的时延最小路由算法,设定所有给定的不确定分布都是正则的,所述算法包括以下步骤:
S1:建立动态拓扑G(V,E(t));
根据移动通信网络中各个节点之间的实时连接关系,建立动态拓扑G(V,E(t)),并将其用邻接矩阵C(t)表示:
其中,V为节点集合,E(t)为链路集合,X表示网络中节点的个数,c
S2:建立动态不确定网络G(V,E(t),D(t));
在构建动态不确定网络时,不考虑目的节点的处理时延,对于从节点m到节点n的通信链路e
d
其中,l
根据步骤S1的动态拓扑,联合链路时延,建立动态不确定网络G(V,E(t),D(t)),其中,D(t)为链路上时延集合,并将其表示为邻接矩阵C
其中,d
S3:按周期性特征转化为静态不确定网络G(V,E,D);
将动态不确定网络G(V,E(t),D(t))转化为多个时间间隔为Δt的静态不确定网络G(V,E(t
S4:建立时延最小路由数学模型;
在静态不确定网络G(V,E,D)中,用P表示从源节点SN到目的节点DN的所有路径集合P={p
其中,p
数据以最大的可能性在时延阈值D
其中,α表示信度,D
S5:计算静态不确定网络中最小时延D
在静态不确定网络G(V,E,D)中,源节点SN到目的节点DN之间的最小时延为D
D
其中,d
S6:根据时延阈值D
基于N-1个三元组,对比Ψ
进一步地,所述步骤S5的具体过程为:
S5-1:最小时延D
S5-2:取
S5-3:令静态不确定网络G(V,E,D)上各链路上的时延为
S5-4:依次令
本发明的有益效果在于:
1.本发明考虑了处理时延的认知不确定性,提出了基于不确定理论的动态不确定网络建模方法,为受认知不确定性影响的移动通信网络建模提供了一种新的建模思路。
2.本发明提出了一种面向动态不确定网络的时延最小路由算法,可以对动态不确定网络实现最大信度时延最小路径的计算,能够为受认知不确定性影响的移动通信网络的路由决策提供支持。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中:
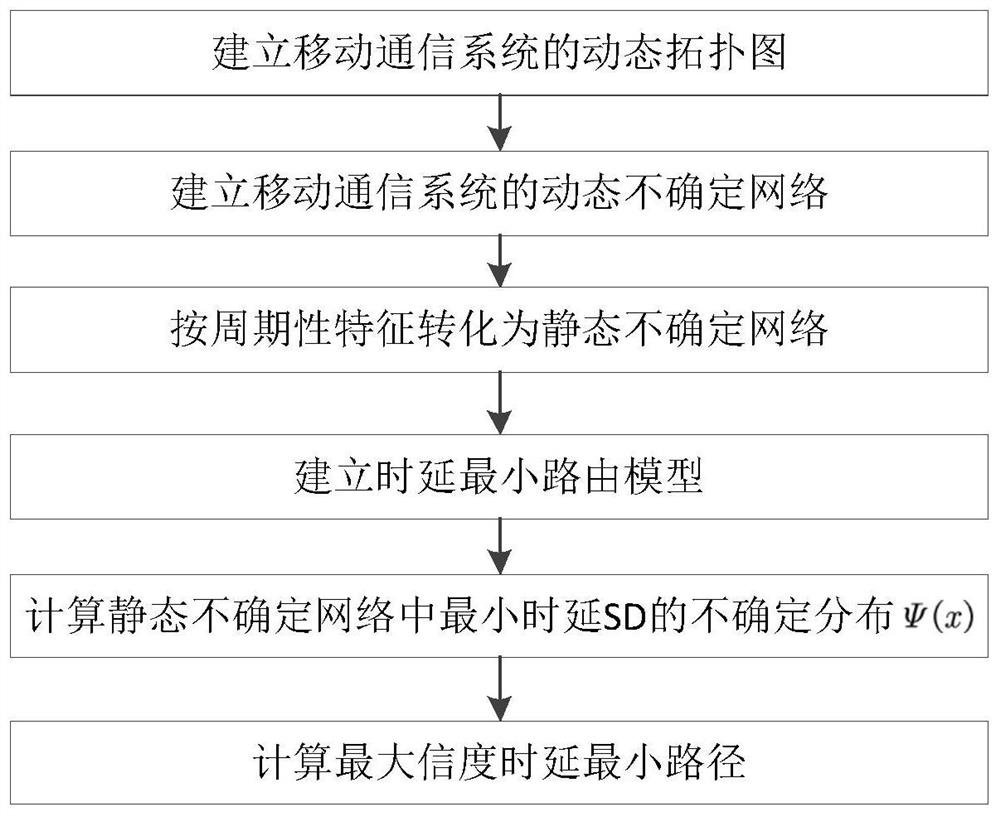
图1是本发明一种面向动态不确定网络的时延最小路由算法流程图;
图2是卫星通信网络示意图;
图3是卫星通信网络拓扑结构示意图。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
如图1所示,一种面向动态不确定网络的时延最小路由算法,对于非正则的不确定分布,给其一个扰动,使其变成正则的,设定所有给定的不确定分布都是正则的,所述算法包括以下步骤:
S1:建立动态拓扑G(V,E(t));
根据移动通信网络中各个节点之间的实时连接关系,建立动态拓扑G(V,E(t)),并将其用邻接矩阵C(t)表示:
其中,V为节点集合,E(t)为链路集合,X表示网络中节点的个数,c
S2:建立动态不确定网络G(V,E(t),D(t));
由于目的节点和源节点的处理时延并不影响路由计算,为了方便建模,在构建动态不确定网络时,不考虑目的节点的处理时延,对于从节点m到节点n的通信链路e
d
其中,l
根据步骤S1的动态拓扑,联合链路时延,建立动态不确定网络G(V,E(t),D(t)),
其中,D(t)为链路上时延集合,并将其表示为邻接矩阵C
其中,d
S3:按周期性特征转化为静态不确定网络G(V,E,D);
由于这类网络呈现周期性特征,为了便于计算,将动态不确定网络G(V,E(t),D(t))转化为多个时间间隔为Δt的静态不确定网络G(V,E(t
S4:建立时延最小路由数学模型;
在静态不确定网络G(V,E,D)中,用P表示从源节点SN到目的节点DN的所有路径集合P={p
其中,p
为了减少端到端时延,数据以最大的可能性在时延阈值D
其中,α表示信度,D
S5:计算静态不确定网络中最小时延D
在静态不确定网络G(V,E,D)中,源节点SN到目的节点DN之间的最小时延为D
D
其中,d
S6:根据时延阈值D
基于N-1个三元组,对比Ψ
进一步地,所述步骤S5的具体过程为:
S5-1:根据不确定运算法则,最小时延D
S5-2:取
S5-3:令静态不确定网络G(V,E,D)上各链路上的时延为
S5-4:依次令
为了方便理解本发明的上述技术方案,以下通过具体实施例对本发明的上述技术方案进行详细说明。
实施例1
如图2所示,以某卫星通信网络为例说明本发明的应用过程。已知该卫星通信网络为Walker型卫星星座,共有8个轨道面,轨道倾角为70°,每个轨道面均匀分布着6颗卫星,每颗卫星距地面1300km,有四个相邻卫星,其中两个为同轨道相邻卫星,两个为相邻轨道相邻卫星,相邻卫星之间建有星间链路。该低轨卫星通信系统的拓扑结构为花环网拓扑结构,如图3所示。在卫星通信系统中,卫星采用激光通信,v=3×10
时延失效阈值D
首先根据卫星通信网络中各个卫星节点之间的连接关系构建拓扑G(V,E),该拓扑G(V,E)包含48个节点和192条边。由于卫星节点之间的连接关系不随时间变化,因此系统的连接关系邻接矩阵为:
基于通信链路的长度周期函数和卫星节点的处理时延,根据公式d
取Δt=1min,将G(V,E,D(t))划分为相隔时间为1min的静态不确定网络。表1展示的是某一时刻网络中各个星间链路长度(两个卫星节点之间存在双向链路且长度相等,所以表1只给出其中一条链路长度)。基于卫星节点处理时延和表1中的链路长度,根据公式d
表1某一时刻星间链路长度(km)
然后,通过分布函数逆运算计算静态不确定网络G(V,E,D)中各个边上时延的不确定分布的逆分布,具体为:
取N=100,令
{a
接下来,令α=0.02,0.03,…,0.99,重复上述计算得到99个三元组。将D
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种面向动态不确定网络的时延最小路由算法
- 一种面向动态不确定网络的时延最小路由算法