一种求解固定时间有限燃料多脉冲转移轨道的方法及系统
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及飞行器空间轨道机动技术领域,尤其涉及一种求解固定时间有限燃料多脉冲转移轨道的方法及系统。
背景技术
在空间运行的飞行器利用剩余燃料机动至目标位置完成任务是空间任务规划中常见的任务需求,例如嫦娥二号飞行器在完成L2点探测任务后利用剩余燃料完成了飞跃Toutatis小行星的拓展实验。另外,在星座部署时,常常在较低轨道部署备份星座,以随时进行轨道机动,替换报废的工作卫星;在星座重构领域,也需要通过卫星在轨机动到达计划位置组成新的星座构型完成预定任务。
飞行器空间机动问题中的目标轨道与初始轨道高度相差大、目标入轨时刻严格的轨道转移任务约束条件复杂、可行域较小。
发明内容
本发明的目的在于克服现有技术缺陷,提出了一种求解固定时间有限燃料多脉冲转移轨道的方法。针对此类问题,本发明提出了一种利用地球引力场J
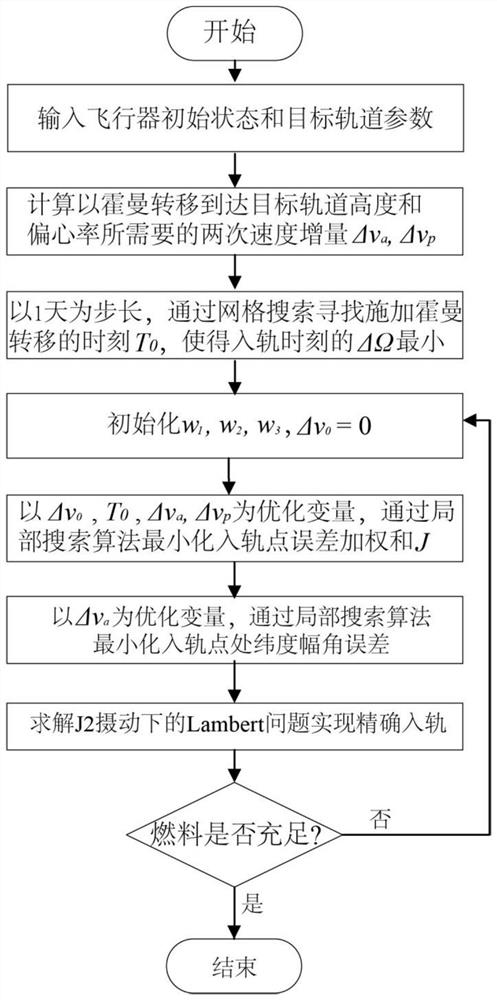
为了实现上述目的,本发明的实施例1提出了一种求解固定时间有限燃料多脉冲转移轨道的方法,所述方法包括:
根据飞行器初始状态、目标轨道参数和可用燃料数,计算以霍曼转移到达目标轨道的两次机动速度增量;
通过网格搜索寻找施加霍曼转移的时刻;
以初始时刻的切向脉冲、施加霍曼转移的时刻以及霍曼转移两次机动的速度增量为优化变量,通过局部搜索算法最小化入轨点误差加权和;
以霍曼转移的第二次机动速度增量为优化变量,通过局部搜索算法最小化入轨点处的纬度幅角差;
求解J2摄动下的Lambert转移,实现精确入轨。
作为上述方法的一种改进,所述根据飞行器初始状态、目标轨道参数和可用燃料数,计算以霍曼转移到达目标轨道的两次机动速度增量;具体包括:
根据下式分别计算霍曼转移的第一次机动速度增量Δv
其中,v
作为上述方法的一种改进,所述通过网格搜索寻找施加霍曼转移的时刻;具体包括:
以1天为步长,通过网格搜索寻找施加霍曼转移的时刻T
作为上述方法的一种改进,所述以初始时刻的切向脉冲、施加霍曼转移的时刻以及霍曼转移两次机动的速度增量为优化变量,通过局部搜索算法最小化入轨点误差加权和;具体包括:
设置初始时刻t
以t
其中,x
当优化求解不收敛且预估目标轨道在燃料可达范围内时,调整权重,增大误差较大项的权重,直至目标函数收敛至设定的精度范围内,得到w
作为上述方法的一种改进,所述以霍曼转移的第二次机动速度增量为优化变量,通过局部搜索算法最小化入轨点处的纬度幅角差;具体包括:
以霍曼转移的第二次机动Δv
本发明的实施例2提出了一种求解固定时间有限燃料多脉冲转移轨道的系统,所述系统包括:机动速度增量计算模块、霍曼转移时刻搜索模块、第一优化模块、第二优化模块和求解Lambert转移模块;其中,
所述机动速度增量计算模块,用于根据飞行器初始状态、目标轨道参数和可用燃料数,计算以霍曼转移到达目标轨道的两次机动速度增量;
所述霍曼转移时刻搜索模块,用于通过网格搜索寻找施加霍曼转移的时刻;
所述第一优化模块,用于以初始时刻的切向脉冲、施加霍曼转移的时刻以及霍曼转移两次机动的速度增量为优化变量,通过局部搜索算法最小化入轨点误差加权和;
所述第二优化模块,用于以霍曼转移的第二次机动速度增量为优化变量,通过局部搜索算法最小化入轨点处的纬度幅角差;
所述求解Lambert转移模块,用于求解J2摄动下的Lambert转移,实现精确入轨。
作为上述系统的一种改进,所述机动速度增量计算模块的具体处理过程包括:
根据下式分别计算霍曼转移的第一次机动速度增量Δv
其中,v
作为上述系统的一种改进,所述霍曼转移时刻搜索模块的具体处理过程包括:
以1天为步长,通过网格搜索寻找施加霍曼转移的时刻T
作为上述系统的一种改进,所述第一优化模块的具体处理过程包括:
设置初始时刻t
以t
其中,x
当优化求解不收敛且预估目标轨道在燃料可达范围内时,调整权重,增大误差较大项的权重,直至目标函数收敛至设定的精度范围内,得到w
作为上述系统的一种改进,所述第二优化模块的具体处理过程包括:
以霍曼转移的第二次机动Δv
与现有技术相比,本发明的优势在于:
1、本发明通过网格搜索施加霍曼转移的时刻,能够利用J2摄动调整飞行器相位,并为精确入轨快速提供了计算初值;
2、本发明通过初始时刻施加的小脉冲,扩大了升交点赤经可达范围,进而提高了算法的收敛性;
3、本发明通过调整入轨时刻各项轨道根数的误差的权重,使得算法更容易收敛至可行解;
4、本方法不仅对一般的燃料充足,目标轨道高度差、相位差较小的转移问题可以收敛;对于轨道高度差较大,且升交点赤经在自然漂移可达范围的边界的轨道机动问题,由于约束条件复杂,可行域小,难以收敛,通过本发明的方法也能够稳定地获得可行解。
附图说明
图1是本发明求解固定时间有限燃料多脉冲转移轨道的方法流程图。
具体实施方式
下面结合附图和实施例对本发明的技术方案进行详细的说明。
实施例1
求解固定时间有限燃料多脉冲转移轨道的方法首先需估算可用燃料可达的最大轨道高度。在预估可行范围内,通过序列二次规划法求解一个迭代优化问题,以目标时刻下各项目标轨道根数的误差的加权和为目标函数,通过一个可以利用地球引力场J
地球惯性坐标系下,考虑J
其中μ为地球引力常数,
其中a为半长轴,e为偏心率,i为轨道倾角,Ω为升交点赤经,ω为近地点幅角,M为平近点角,
每次施加脉冲后的剩余质量m
其中,m
对t
步骤1)估算目标位置是否在燃料允许的最大可达范围内。
通过霍曼转移预估由初始轨道转移至目标高度、倾角和偏心率的轨道需要消耗的燃料并将计算结果作为下步优化的初值;通过公式(2)和公式(3)估算轨道升交点赤经漂移范围。霍曼转移和单脉冲改变轨道面的计算公式如下:
其中v
步骤2)通过网格搜索寻找施加霍曼转移的时刻T
霍曼转移的第一次机动Δv
步骤3)通过初始时刻的小脉冲和霍曼变轨改变轨道高度、偏心率和升交点赤经。
在t
式中w
步骤4)优化霍曼转移的第二次机动以最小化目标时刻的纬度幅角差Δu。
以霍曼转移的第二次机动Δv
步骤5)通过J2摄动下的Lambert转移实现精确入轨。
以修正儒略日MJD 2000t=7305,a=7850.4596km,e=0.000927,i=74.0122°,Ω=255.5194°,ω=308.1015°,M=58.1223°出发,目标为MJD 2000t=7396,a=9337.0006,e=0,i=74°,Ω=254.6356°,ω=0°,M=0.9652°,可用燃料20kg的转移轨道计算为例。计算结果即转移过程如下表所示,第一次小脉冲Δv
表1转移过程示例
创新点:
1)本发明通过网格搜索施加霍曼转移的时刻,能够利用J2摄动调整飞行器相位,并为精确入轨快速提供了计算初值;
2)本发明通过初始时刻施加的小脉冲,扩大了升交点赤经可达范围,进而提高了算法的收敛性;
3)本发明通过调整入轨时刻各项轨道根数的误差的权重,使得算法更容易收敛至可行解。
实施例2
本发明的实施例2提出了一种求解固定时间有限燃料多脉冲转移轨道的系统。系统包括:机动速度增量计算模块、霍曼转移时刻搜索模块、第一优化模块、第二优化模块和求解Lambert转移模块;具体处理方法同实施例1,其中,
所述机动速度增量计算模块,用于根据飞行器初始状态、目标轨道参数和可用燃料数,计算以霍曼转移到达目标轨道的两次机动速度增量;
所述霍曼转移时刻搜索模块,用于通过网格搜索寻找施加霍曼转移的时刻;
所述第一优化模块,用于以初始时刻的切向脉冲、施加霍曼转移的时刻以及霍曼转移两次机动的速度增量为优化变量,通过局部搜索算法最小化入轨点误差加权和;
所述第二优化模块,用于以霍曼转移的第二次机动速度增量为优化变量,通过局部搜索算法最小化入轨点处的纬度幅角差;
所述求解Lambert转移模块,用于求解J2摄动下的Lambert转移,实现精确入轨。
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种求解固定时间有限燃料多脉冲转移轨道的方法及系统
- 一种求解固定时间有限燃料多脉冲转移轨道的方法及系统