一种波浪爬高图像识别方法
文献发布时间:2023-06-19 13:26:15
技术领域
本发明属于海岸工程影像测量技术领域,具体涉及一种波浪爬高图像识别方法。
背景技术
在海岸工程领域中,海滩波浪爬高是影响海滩沙丘侵蚀和堆积的主要因素。在实验室中,可以采用水槽或港池的波浪物理模型实验来模拟海滩的波浪爬高。
现有的实验室测量波浪爬高的技术,主要有波浪传感器(波高仪)法和目测法。波浪传感器法需要将仪器放置在实验地形的表面。目测法是在实验地形表面或者侧面放置标尺,再通过目测来记录爬高。波浪传感器法只能用于某一特征截面上的波浪爬高测量,无法获得波浪爬高平面上的变化。而目测法的测量效率较低、精度较差且只能识别单次的最大爬高。同时对于实验地形在时刻发生变化的动床地形实验,现有的技术很难取得精准的数据资料。
图像识别技术已经广泛的应用于海岸工程中,其具有精准度高、测量时间长和空间分辨率高的特点。针对波浪爬高测量领域,有必要研制一种实验室或港池波浪爬高图像识别方法,能够实现对实验室或港池的三维波浪爬高和动床地形下的高精准度、高可靠性和高空间分辨率的波浪爬高测量。
发明内容
解决的技术问题:针对上述技术问题,本发明提供了一种波浪爬高图像识别方法,可以解决传统手段测量精度低、可靠性低、空间分辨率低、无法用于动床地形和三维波浪爬高实验的问题。
技术方案:一种波浪爬高图像识别方法,包括步骤如下:
S1.摄像机的安装与校正:将摄像机的视野正对水陆交界区安装,通过标定板对摄像机进行内参数标定,并以水槽为参考系建立摄像机影像的相对坐标系;
S2.波浪爬高影像的获取:在实验过程中开启摄像机获取波浪爬高影像;
S3.影像数据的分析:
S3.1数据预处理:
S3.1.1影像转换:将波浪爬高影像转换为连续的瞬时图像;
S3.1.2影像矫正:基于摄像机内参数将瞬时图像映射得到未发生畸变的爬高瞬时图像,再通过摄像机外参数建立爬高瞬时图像的像素坐标与相对坐标系的位置坐标之间的映射关系;
S3.1.3色域转换:将爬高瞬时图像转换到特定图像显示色域空间,获得单色域图像;
S3.2影像爬高提取:
S3.2.1波浪爬高识别:通过水陆边界检测方法获取单色域图像的水陆边界的像素坐标,即波浪爬高的像素坐标;
S3.2.2影像逆映射:将波浪爬高的像素坐标逆映射到相对坐标系中,得到实际的波浪爬高数据,通过分析一组时间连续的瞬时图像,重复步骤S3.2.1和S3.2.2即可得到波浪爬高的时间序列。
优选的,所述摄像机固定于水槽的侧壁或顶部,通过无线信号连接上位机,所述上位机用于摄像机的开关控制和影像数据的分析。
优选的,所述内参数包括相机焦距、焦点、偏斜系数和畸变系数。
优选的,所述步骤S3.1.1中影像转换的具体方法为:按照确定的帧间隔将波浪爬高影像转换为多幅瞬时图像。
优选的,所述步骤S3.1.2中映射关系的建立方法为:选取至少6个已知相对坐标系的位置坐标的水槽固定点,并在未畸变的爬高图像中抓取所述水槽固定点的像素坐标,建立爬高图像的像素坐标与相对坐标系的位置坐标之间的映射关系。
优选的,所述步骤S3.1.2中映射关系的计算方法如下:
式中:(
优选的,所述步骤S3.1.3中色域转换的具体方法为:选取爬高瞬时图像中的波浪爬高区域,并用图像显示增强手段提高图像的显示效果,最后将其转换到HSV(Hue,Saturation, Value)图像色域空间,获得单色域图像。
优选的,所述图像显示增强手段为提高图像对比度。
优选的,所述步骤S3.2.1中水陆边界检测方法为PMI(Pointwise MutualInformation)边界识别算法。
有益效果:本发明针对海岸工程实验室中动床地形和三维波浪爬高检测的需求,研制了一种波浪爬高图像识别方法,图像识别方法可以高精确度获得波浪爬高的空间和时间分布,可自动实现从实验视频中提取波浪爬高数据并转化为时间序列数据。从而解决了传统手段测量精度低、可靠性低、空间分辨率低、无法用于动床地形和三维波浪爬高实验的问题。
附图说明
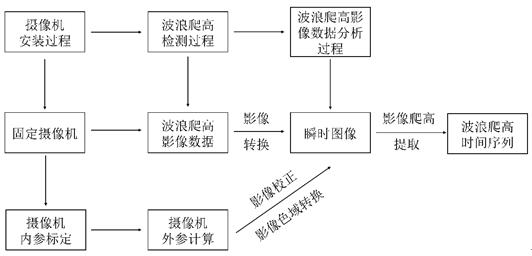
图1是本发明实施例的流程示意图;
图2是本发明实施例的影像摄像机安装示意图;
图3是本发明实施例的摄像头安装局部放大图;
图4是本发明实施例的波浪爬高影像数据分析流程示意图;
图中各数字标号代表如下:1.波浪造波板;2.摄像机;3.消波板;4.试验地形;5.波浪水槽;6.固定夹具。
具体实施方式
本发明提供一种波浪爬高图像识别方法,适用于海岸工程领域物理模型实验中波浪爬高的检测和数据处理。以下结合附图和实施例对本发明的具体实施方式进行进一步说明。
实施例1
如图1所示,一种波浪爬高图像识别方法,包括步骤如下:
S1.摄像机的安装与校正:将摄像机的视野正对水陆交界区安装,通过标定板对摄像机进行内参数标定,并以水槽为参考系建立摄像机影像的相对坐标系;
S2.波浪爬高影像的获取:在实验过程中开启摄像机获取波浪爬高影像;
S3.影像数据的分析:
S3.1数据预处理:
S3.1.1影像转换:将波浪爬高影像转换为连续的瞬时图像;
S3.1.2影像矫正:基于摄像机内参数将瞬时图像映射得到未发生畸变的爬高瞬时图像,再通过摄像机外参数建立爬高瞬时图像的像素坐标与相对坐标系的位置坐标之间的映射关系;
S3.1.3色域转换:将爬高瞬时图像转换到特定图像显示色域空间,获得单色域图像;
S3.2影像爬高提取:
S3.2.1波浪爬高识别:通过水陆边界检测方法获取单色域图像的水陆边界的像素坐标,即波浪爬高的像素坐标;
S3.2.2影像逆映射:将波浪爬高的像素坐标逆映射到相对坐标系中,得到实际的波浪爬高数据,通过分析一组时间连续的瞬时图像,重复步骤S3.2.1和S3.2.2即可得到波浪爬高的时间序列。
如图2所示,所述摄像机2固定于水槽的侧壁或顶部,通过无线信号连接上位机,所述上位机用于摄像机2的开关控制和影像数据的分析,摄像机2的具体安装如下:动床实验地形4被铺设在波浪水槽5中,波浪造波板1安装在实验地形4后方,消波板3安装在实验地形4的前方,摄像机2被安装固定在波浪水槽5上,局部示意如图3 所示。如图3所示,摄像头安装过程中主要涉及波浪水槽5、摄像机2、固定夹具6。固定夹具6将摄像机2以俯视视角固定在波浪水槽5上。摄像机2的视角主要集中在实验过程中波浪和陆地的交界区。摄像机2通过无线信号连接上位机,并通过上位机进行控制和拍摄。
所述内参数包括相机焦距、焦点、偏斜系数和畸变系数,通过摄像机拍摄不同角度的标准标定板图像,可以计算确定内参数。内参数在摄像机检测爬高的过程中不会发生改变,因此可以由内参数计算得到未发生畸变的爬高瞬时图像。
如图4所示,所述步骤S3.1.1中影像转换的具体方法为:按照确定的帧间隔将波浪爬高影像转换为多幅瞬时图像。在本实施例中是将摄像机拍摄的2K 60Hz视频每隔0.05秒抽取一帧图像,从而得到原始的瞬时图像。
所述步骤S3.1.2中映射关系的建立方法为:选取至少6个已知相对坐标系的位置坐标的水槽固定点,并在未畸变的爬高瞬时图像中抓取所述水槽固定点的像素坐标,建立爬高瞬时图像的像素坐标与相对坐标系的位置坐标之间的映射关系。
在本实施例中选取了视野中6个水槽固定点来计算摄像机外部参数。水槽固定点分布于水槽壁两侧,并且已知其相对坐标。通过下式中的计算方法得到摄像机的相对坐标以及镜头方位角
式中:(
所述步骤S3.1.3中色域转换的具体方法为:选取爬高瞬时图像中的波浪爬高区域,并用图像显示增强方法提高图像的显示效果,最后将其转换到HSV(Hue, Saturation,Value)图像色域空间,获得单色域图像。在本实施例中图像显示增强手段为提高图像对比度,从而可以提高检测内容的可视性。
在本实施例中,步骤S3.2.1中水陆边界检测方法为PMI(Pointwise MutualInformation)边界识别算法。通过PMI算法可以获得单色域图像的水陆边界,即波浪爬高的像素坐标,并根据逆映射关系计算得到实际的位置坐标。
所述步骤S3中:波浪爬高影像转换为多幅瞬时图像,通过坐标整理可以得到相对于静水面的波浪爬高的时间序列以及特征断面的最大爬高时间堆栈。
- 一种波浪爬高图像识别方法
- 一种图像识别模型的训练方法、图像识别方法及装置