载车AGV行走和准确定位的方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及AGV存取车技术领域,具体来说,涉及一种载车AGV行走和准确定位的方法。
背景技术
目前立体车库由于其本身的紧凑结构能解决车位少的问题,但狭小空间使司机停车困难,现在使用载车AGV在舒适停车区和车辆存储区之间行驶并准确定位存取车,解决司机停车困难和车位少的问题,载车AGV主要采用激光雷达导航、二维码视觉或磁导航等常见的导航方式来实现,由于停车场地面条件简陋,高低不平,传统的这几种导航方式存在诸多的无法适应地面因素导致导航不准的问题,使AGV存取车不到位故障率高的问题,要想较好使用几种常用的一般用于工业场合的导航方式需要平整和硬化整个停车场地面,费用高,经济效益差,因此载车AGV的推广受到严重制约。
发明内容
针对相关技术中的上述技术问题,本发明提出一种载车AGV行走和准确定位的方法,能够实现载车AGV在不同阶段分别采用导航、机械配合导向限位和光电信号定位来实现行驶和准确定位存取车。
为实现上述技术目的,本发明的技术方案是这样实现的:一种载车 AGV行走和准确定位的方法,其特征在于,该方法包括以下步骤:
S1:所述载车AGV的两侧装有两个激光雷达,所述载车AGV前后四个侧边装有四个滚轮及四个反射光电传感器,在停车台靠后的里侧设有反光贴膜,所述载车AGV长度为4.5~5.6米,任意一边能够进入封闭的空间取车;
S2:车位的两侧设有停车台,每个车位在进口处均有外宽内窄 5~20°范围内的导向斜角,每个车位在停车台内侧贴反光贴膜,所述反射光电传感器检测贴膜反光后,所述载车AGV将定点停止并进行存取车辆操作;
S3:所述载车AGV在不同的行驶阶段采用不同的导航或控制方案,所述载车AGV包含四个阶段,不同阶段AGV采用不同的控制方式进一步包括:
S3.1所述载车AGV处于在中间通道行驶或旋转阶段;
S3.2所述载车AGV处于准备进入或刚进入车位的阶段;
S3.3所述载车AGV处于车位内部阶段;
S3.4所述载车AGV处于离开车位阶段。
进一步地,所述的S1进一步包括:
S1.1所述载车AGV的两侧装有两个所述激光雷达,采用双侧所述激光雷达时避免被遮蔽;
S1.2所述滚轮用于确保所述载车AGV不会磕碰停车台,更重要的是在所述载车AGV进入车位时和每个车位停车台的导向斜角一起纠正所述载车AGV的偏差位置,保证所述载车AGV顺利进入车位;
S1.3所述载车AGV进入车位时有正反两个方向,无论所述载车 AGV从那一端进入车位,所述载车AGV上的其中一个所述反射光电传感器检测贴膜反光后,所述载车AGV将定点停止并进行存取车辆操作。
进一步地,所述的S2进一步包括:
S2.1在所述载车AGV进入车位时导向斜角和所述载车AGV的侧向滚轮共同配合,保证在所述载车AGV出现位置偏差或行驶角度偏差时能够纠正进入车位;
S2.2每个车位在停车台内侧贴反光贴膜,使得所述载车AGV精准定位停止。
进一步地,所述的S3.1进一步包括:
S3.1.1采用两个所述激光雷达定位数据做行驶时的导航数据,在行驶过程中导航数据跳动和精度问题不影响所述载车AGV的行驶和旋转动作;
S3.1.2地面不平导致所述载车AGV的震动使导航数据出现在20CM 以内的位置偏差和在3°以内角度偏差,此时导航数据偏差范围满足所述载车AGV在中间通道行驶或旋转行驶要求。
进一步地,所述的S3.2进一步包括:
S3.2.1在进入车位阶段所述载车AGV上的其中一个所述激光雷达处于信号断断续续状态,此时导航数据的位置偏差和角度偏差跳动比较大,靠所述激光雷达导航数据难以满足进入车位5CM误差范围;
S3.2.2所述载车AGV进入每个车位时先通过两个所述激光雷达定位数据纠正位置和自身角度,然后直行进入车位;
S3.2.3直行进入时所述载车AGV不再使用两个所述激光雷达定位数据,而是靠自身所述滑轮和车位停车台的导向斜角配合纠正机器的位置和角度进入车位的内部,并通过停车台的外宽内窄开口保证所述载车 AGV出现偏差能顺利导入车位。
进一步地,所述的S3.3进一步包括:
S3.3.1根据精确定位停止进行存车或取车操作,此时所述载车 AGV处于只有一个激光雷达定位数据有效,容易被障碍物遮蔽状态,定位数据不太可靠;
S3.3.2所述载车AGV在进入每个车位后两侧有停车台限位,左右位置偏差和车身角度偏差都不会超出范围,仅需要解决向前行驶的位置偏差;
S3.3.3根据所述反射光电传感器检测贴膜反光来精准定位停止,有效保证存车或取车的正常进行。
进一步地,所述的S3.4进一步包括:
S3.4.1所述载车AGV根据自身所述滑轮和停车台的限位,保证左右位置偏差和车身角度偏差均不会超出范围,确保行驶控制准确;
S3.4.2所述载车AGV脱离车位到中间通道再切换回两个所述激光雷达定位导航进行后续的行驶和旋转。
本发明的有益效果:鉴于现有技术中存在的不足,本申请在采用特殊的双侧激光雷达导航的基础上,又增加停车台和AGV的机械配合限位和光电传感器定位的配合技术手段,分阶段采用不同控制技术方案来实现载车 AGV的行驶并准确定位存取车,减小对地面和环境的要求,使载车AGV 能在普通的民用停车场可靠使用,不再是传统的导航方案,而是载车AGV 在不同阶段分别采用导航、机械配合导向限位和光电信号定位来实现行驶和准确定位存取车。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
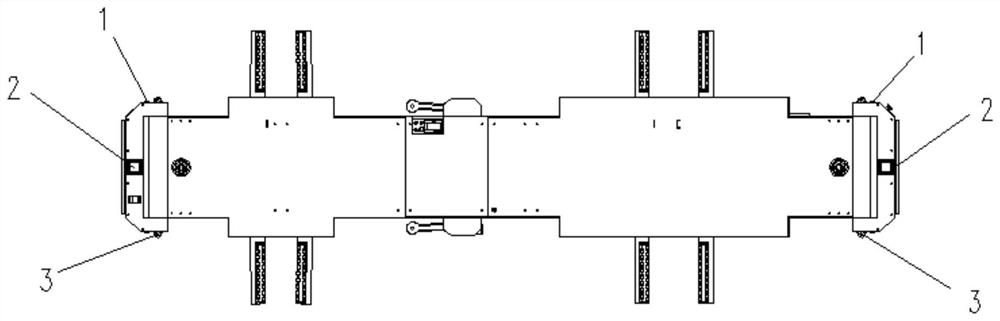
图1是根据本发明实施例所述的载车AGV行走和准确定位的方法所述载车AGV整体结构示意图;
图2是根据本发明实施例所述的载车AGV行走和准确定位的方法车位的停车台示意图;
图3是根据本发明实施例所述的载车AGV行走和准确定位的方法所述载车AGV出现位置偏差示意图;
图4是根据本发明实施例所述的载车AGV行走和准确定位的方法所述载车AGV精准定位停止示意图;
图5是根据本发明实施例所述的载车AGV行走和准确定位的方法所述载车AGV不同阶段控制方式示意图;
图中:1、反射光电传感器;2、激光雷达;3、滚轮;4、停车台;5、反光贴膜;6、导向斜角。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
如图1-5所示,根据本发明实施例所述的载车AGV行走和准确定位的方法,该方法包括以下步骤:
步骤一,载车AGV上加装多个装置和机械机构;
步骤二,车位的两侧设有停车台;
步骤三,所述载车AGV在不同的行驶阶段采用不同的导航或控制方案;
在本发明的一个具体实施例中,所述载车AGV的两侧装有两个激光雷达,所述载车AGV长度为4.5~5.6米,任意一边能够进入封闭的空间取车,如果像普通AGV采用一个激光雷达,载车AGV进停车位时装有激光雷达一端在停车位内部封闭空间将无法获得定位信号,从而无法判断自己的位置,本申请在所述载车AGV的两侧装有两个所述激光雷达,采用双侧所述激光雷达时避免被遮蔽;
然后,所述载车AGV前后四个侧边装有四个滚轮,所述滚轮用于确保所述载车AGV不会磕碰停车台,更重要的是在所述载车AGV进入车位时和每个车位停车台的导向斜角一起纠正所述载车AGV的偏差位置,保证所述载车AGV顺利进入车位,进入车位后所述滚轮能保证所述载车AGV在停车台内侧行进,避免所述载车AGV和停车台发生摩擦磕碰,同时四个所述滚轮和停车台之间限位,能保证所述载车AGV的行驶角度正确;
其次,所述载车AGV前后四个侧边装有四个反射光电传感器,在停车台靠后的里侧设有反光贴膜,所述载车AGV进入车位时有正反两个方向,无论所述载车AGV从那一端进入车位,所述载车AGV上的其中一个所述反射光电传感器检测贴膜反光后,所述载车AGV将定点停止并进行存取车辆操作。
在本发明的一个具体实施例中,车位的两侧设有停车台,每个车位在进口处均有外宽内窄5~20°范围内的导向斜角,在所述载车AGV进入车位时导向斜角和所述载车AGV的侧向滚轮共同配合,保证在所述载车AGV出现位置偏差或行驶角度偏差时能够纠正进入车位,每个车位在停车台内侧贴反光贴膜,所述反射光电传感器检测贴膜反光后,所述载车AGV将定点停止并进行存取车辆操作,解决所述载车AGV精准定位停车的问题。
在本发明的一个具体实施例中,所述载车AGV在不同的行驶阶段采用不同的导航或控制方案,所述载车AGV包含四个阶段,不同阶段 AGV采用不同的控制方式进一步包括:
所述载车AGV处于在中间通道行驶或旋转阶段,该行驶阶段采用两个所述激光雷达定位数据做行驶时的导航数据,在行驶过程中导航数据跳动和精度问题不影响所述载车AGV的行驶和旋转动作,地面不平导致所述载车AGV的震动使导航数据出现在20CM以内的位置偏差和在3°以内角度偏差,此时导航数据偏差范围满足所述载车AGV在中间通道行驶或旋转行驶要求;
所述载车AGV处于准备进入或刚进入车位的阶段,在进入车位阶段所述载车AGV上的其中一个所述激光雷达处于信号断断续续状态,此时导航数据的位置偏差和角度偏差跳动比较大,靠所述激光雷达导航数据难以满足进入车位5CM误差范围,所述载车AGV进入每个车位时先通过两个所述激光雷达定位数据纠正位置和自身角度,然后直行进入车位,直行进入时所述载车AGV不再使用两个所述激光雷达定位数据,而是靠自身所述滑轮和车位停车台的导向斜角配合纠正机器的位置和角度进入车位的内部,并通过停车台的外宽内窄开口保证所述载车AGV 出现偏差能顺利导入车位;
所述载车AGV处于车位内部阶段,根据精确定位停止进行存车或取车操作,此时所述载车AGV处于只有一个激光雷达定位数据有效,容易被障碍物遮蔽状态,定位数据不太可靠,所述载车AGV在进入每个车位后两侧有停车台限位,左右位置偏差和车身角度偏差都不会超出范围,仅需要解决向前行驶的位置偏差,根据所述反射光电传感器检测贴膜反光来精准定位停止,有效保证存车或取车的正常进行;
所述载车AGV处于离开车位阶段,所述载车AGV根据自身所述滑轮和停车台的限位,保证左右位置偏差和车身角度偏差均不会超出范围,确保行驶控制准确,所述载车AGV脱离车位到中间通道再切换回两个所述激光雷达定位导航进行后续的行驶和旋转。
为了方便理解本发明的上述技术方案,以下通过具体使用方式上对本发明的上述技术方案进行详细说明。
在具体使用时,根据本发明所述的载车AGV行走和准确定位的方法,该方法包括以下步骤:步骤一,载车AGV上加装多个装置和机械机构,所述载车AGV的两侧装有两个激光雷达,所述载车AGV前后四个侧边装有四个滚轮及四个反射光电传感器,在停车台靠后的里侧设有反光贴膜,所述载车AGV长度为4.5~5.6米,任意一边能够进入封闭的空间取车,步骤二,车位的两侧设有停车台,每个车位在进口处均有外宽内窄5~20°范围内的导向斜角,每个车位在停车台内侧贴反光贴膜,所述反射光电传感器检测贴膜反光后,所述载车AGV将定点停止并进行存取车辆操作,步骤三,所述载车AGV在不同的行驶阶段采用不同的导航或控制方案,所述载车AGV包含四个阶段,不同阶段AGV采用不同的控制方式进一步包括:所述载车AGV处于在中间通道行驶或旋转阶段,所述载车AGV处于准备进入或刚进入车位的阶段,所述载车AGV 处于车位内部阶段,所述载车AGV处于离开车位阶段。
综上所述,借助于本发明的上述技术方案,通过采用特殊的双侧激光雷达导航的基础上,又增加停车台和AGV的机械配合限位和光电传感器定位的配合技术手段,分阶段采用不同控制技术方案来实现载车AGV的行驶并准确定位存取车,减小对地面和环境的要求,使载车AGV能在普通的民用停车场可靠使用,不再是传统的导航方案,而是载车AGV在不同阶段分别采用导航、机械配合导向限位和光电信号定位来实现行驶和准确定位存取车。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 载车AGV行走和准确定位的方法
- 自行走载车的转向控制方法和自行走载车的转向控制装置