一种钢筋网的智能捆扎方法
文献发布时间:2023-06-19 13:27:45
技术领域
本申请涉及建筑施工的技术领域,尤其是涉及一种钢筋网的智能捆扎方法。
背景技术
对于混凝土建筑,在施工过程中,需要铺设钢筋,形成钢筋网,并对钢筋网进行捆扎作业。而目前国内的钢筋网捆扎方式主要为两种,每种方式均有一定的优缺点。一种方式是采用人工纯手工捆扎,优点是钢筋捆扎效果好,缺点是钢筋捆扎速度慢,每处钢筋的捆扎时间平均在3s左右,且大量浪费人力资源;另一种方式是采用人工手持自动捆扎机完成钢筋的捆扎,优点是钢筋捆扎效率高,每处钢筋的捆扎时间平均在0.8s左右,缺点是工人需要手持自动捆扎机,造成工人的劳动强度过高。
在上述的相关技术中,存在钢筋捆扎的效率低下以及工人的劳动强度高的问题。
发明内容
为了提高钢筋捆扎的效率,降低人工捆扎钢筋的劳动强度,本申请提供一种钢筋网的智能捆扎方法。
本申请提供的一种钢筋网的智能捆扎方法,采用如下的技术方案:
一种钢筋网的智能捆扎方法,包括以下步骤:
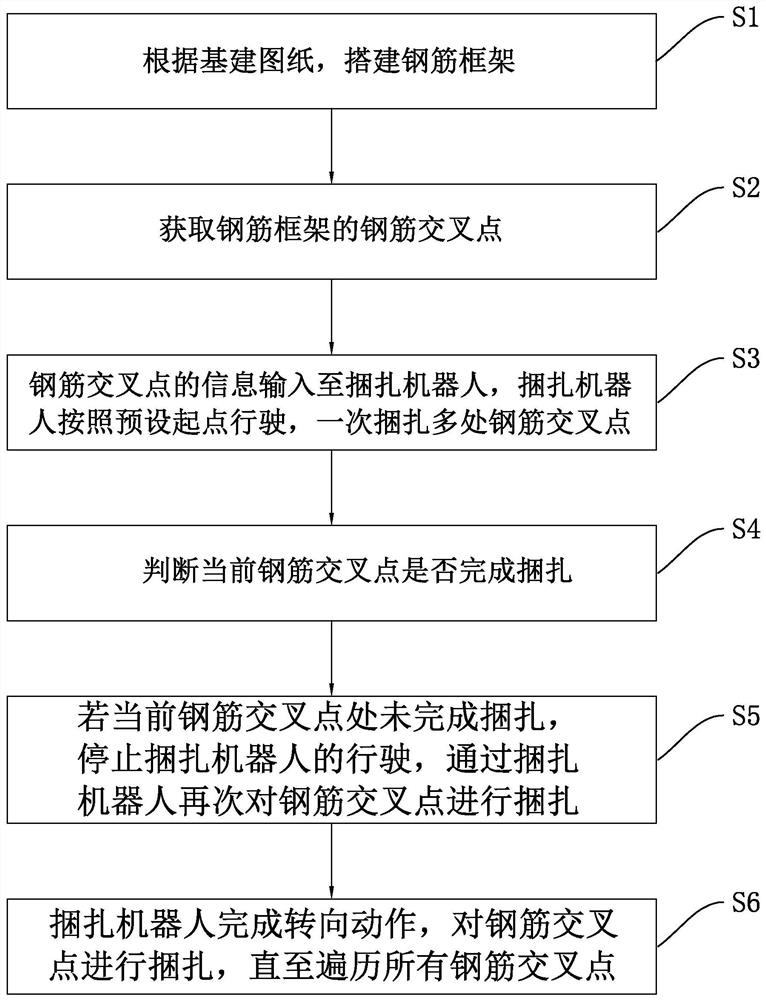
S1、根据基建图纸,搭建钢筋框架;
S2、获取钢筋框架的钢筋交叉点;
S3、钢筋交叉点的信息输入至捆扎机器人,捆扎机器人按照预设起点行驶,一次捆扎多处钢筋交叉点;
S4、判断当前钢筋交叉点是否完成捆扎;
S5、若当前钢筋交叉点处未完成捆扎,停止捆扎机器人的行驶,通过捆扎机器人再次对钢筋交叉点进行捆扎;
S6、捆扎机器人完成转向动作,对钢筋交叉点进行捆扎,直至遍历所有钢筋交叉点。
通过采用上述技术方案,获取钢筋框架的钢筋交叉点后,捆扎机器人能够一次捆扎多处钢筋交叉点,使得捆扎机器人能够在最短的时间内完成钢筋交叉点处的捆扎作业,通过判断捆扎机器人每次的捆扎作业是否正确捆扎在钢筋交叉点处,确保钢筋框架的捆扎质量;本技术方案提高了钢筋捆扎的效率,通过机器自动化捆扎,降低了工人的劳动强度。
优选的,所述步骤S2包括:
S2.1、对钢筋框架进行摄像处理,得到钢筋框架的上层钢筋交叉点;
S2.2、将钢筋交叉点绘制成二维数据,在控制系统内生成钢筋交叉点坐标。
通过采用上述技术方案,摄像处理后,得到钢筋框架上层的钢筋交叉点,建立钢筋交叉点的二维坐标,以便于机器人在第一时间完成对钢筋框架上钢筋交叉点处的捆扎作业,缩减完成钢筋框架捆扎所需时间。
优选的,所述步骤S2通过无人机上装载CCD工业相机处理钢筋框架上的钢筋交叉点。
通过采用上述技术方案,无人机搭配CCD工业相机拍摄到钢筋框架上层的所有钢筋交叉点,在运行的情况下,能够清晰地拍摄到钢筋框架。
优选的,所述步骤S2中测定钢筋的粗细,计算出完成捆扎作业的最少用丝量。
通过采用上述技术方案,测定钢筋的粗细后,能够计算出捆扎所有钢筋交叉点所需要的最少钢丝量,以确保捆扎机器人上的钢丝是否足量,不足量的情况下,可提前备料。
优选的,根据钢筋交叉点信息,模拟出捆扎机器人的最佳行走路线,捆扎机器人按照最佳行走路线运行。
通过采用上述技术方案,捆扎机器人按照最佳行走路线运行,缩减完成钢筋框架捆扎所需的时间。
优选的,捆扎机器人包括多个捆扎单元,捆扎单元上的钢丝即将用完时,捆扎机器人发出预警;若一个捆扎单元上的钢丝用完,则停止这一捆扎单元的捆扎动作,其余捆扎单元继续工作,并根据余下待捆扎的钢筋交叉点,重新确定捆扎机器人的最佳行走路线;若所有的捆扎单元上的钢丝用完,则捆扎单元停止工作,捆扎机器人运行至钢筋框架的边缘处。
通过采用上述技术方案,捆扎机器人发生预警后,工人能够在第一时间运送钢丝于工作区域;若无法在第一时间内完成钢丝的运送,导致某一捆扎单元无法进行捆扎作业,捆扎机器人重新确定行走路线,捆扎机器人上其余的捆扎单元继续进行捆扎作业,保证不停机作业,缩减完成钢筋框架捆扎所需的时间;若所有捆扎单元上的钢丝用完后,捆扎机器人运行至钢筋框架的边缘处,工人能够第一时间完成对捆扎单元的上丝作业,缩减完成钢筋框架捆扎所需的时间,以及减少工人的劳动量。
优选的,捆扎机器人还包括被动裁切单元,捆扎机器人上的捆扎单元在捆扎钢筋后,捆扎单元无法自动剪断钢丝,捆扎机器人发出警报,停止这一捆扎单元的运行,被动裁切单元切断钢丝。
通过采用上述技术方案,发生捆扎单元无法自动剪断钢丝后,被动裁切单元切断钢丝,捆扎机器人能够继续运行,其余的捆扎单元能够继续捆扎钢筋,确保了不停机作业,缩减完成钢筋框架捆扎所需的时间。
优选的,捆扎机器人通过信号连接有远程控制单元,远程控制单元可接收捆扎机器人的工作信息,远程控制单元可控制捆扎机器人运行至钢筋框架的边缘处,完成捆扎单元的上丝作业。
通过采用上述技术方案,人为通过远程控制单元对捆扎机器人进行操控,便于快速完成捆扎单元的上丝作业,确保钢筋捆扎的效率,能够在最短的时间内完成钢筋框架的捆扎作业。
优选的,所述步骤S4中选用在线识别单元对捆扎完成处的钢筋捆扎点进行识别,在线识别单元为照相机,照相机拍出在前钢筋交叉点处的照片,并将照片信息发送至捆扎机器人的处理器,与处理器内的对比照片进行比对。
通过采用上述技术方案,确保当前捆扎处是否完成捆扎,进而能够第一时间对未捆扎处进行捆扎作业,减少作业量。
优选的,所述步骤S2.1中生成的图像进行平滑滤波处理,平滑滤波处理为调用gauss_filter高斯滤波算子进行平滑滤波处理。
通过采用上述技术方案,能够得到最精确的钢筋交叉点信息。
综上所述,本申请包括以下至少一种有益技术效果:
获取钢筋框架的钢筋交叉点后,捆扎机器人能够一次捆扎多处钢筋交叉点,使得捆扎机器人能够在最短的时间内完成钢筋交叉点处的捆扎作业,通过判断捆扎机器人每次的捆扎作业是否正确捆扎在钢筋交叉点处,确保钢筋框架的捆扎质量;
通过测定钢筋的粗细,计算出捆扎所有钢筋交叉点需要的最少钢丝量,以确保捆扎机器人上的钢丝是否足量,不足量的情况下,可提前备料;
捆扎机器人发生预警后,工人能够在第一时间运送钢丝于工作区域,以便于完成钢丝的上丝作业;若无法在第一时间内完成钢丝的运送,当前捆扎单元停止运行,重新确定行走路线,其余捆扎单元继续进行捆扎作业;若所有捆扎单元上的钢丝用完后,机器人运行至钢筋框架的边缘处,工人能够第一时间完成对捆扎单元的上丝作业。
附图说明
图1是本申请实施例的流程框图。
具体实施方式
以下结合附图1对本申请作进一步详细说明。
本申请实施例公开一种钢筋网的智能捆扎方法。如图1所示,钢筋网的智能捆扎方法包括以下步骤:
S1、根据基建图纸,通过钢筋与箍筋配合,搭建成钢筋框架。
S2、根据搭建成的钢筋框架,获取钢筋框架的钢筋交叉点;具体的获取方式为:
S2.1、对钢筋框架进行摄像处理,得到钢筋框架的上层钢筋交叉点;摄像处理方式可采用无人机装载CCD工业相机,通过无人机在钢筋框架的正上方匀速飞行,按照特定路径运行,对钢筋框架进行摄像拍照处理,得到钢筋框架上层的钢筋交叉点;同样的,获取钢筋框架的钢筋交叉点的方式也可通过无人机装载高清摄像机。其中,生成的图像进行平滑滤波处理,平滑滤波处理为调用gauss_filter高斯滤波算子进行平滑滤波处理。
S2.2、将钢筋交叉点绘制成二维数据,在控制系统内生成钢筋交叉点坐标。
摄像处理后,得到钢筋框架上层的钢筋交叉点,建立钢筋交叉点的二维坐标,以便于捆扎机器人在第一时间完成对钢筋框架上钢筋交叉点处的捆扎作业,缩减完成钢筋框架捆扎所需时间。
S3、钢筋交叉点的坐标信息通过通信传输形式输入至捆扎机器人,捆扎机器人按照预设起点行驶,在此过程中,捆扎钢筋框架上的钢筋交叉点,捆扎机器人一次捆扎多处钢筋交叉点。
S4、捆扎机器人每次捆扎钢筋交叉点结束后,通过捆扎机器人上的在线识别单元,判断钢丝是否完成在钢筋交叉点的捆扎作业。在线识别单元可以为照相机,照相机在捆扎机器人完成钢筋交叉点的捆扎时,对钢筋交叉点进行拍照,并将拍照的图片传送至捆扎机器人的处理器,与处理器内的对比照片进行比对。
S5、通过对比可知,若当前钢筋交叉点处未完成捆扎,停止捆扎机器人的行驶,捆扎机器人再次对钢筋交叉点进行捆扎,同时,再一次进行拍照比对,直至完成当前钢筋交叉点处的捆扎作业。
S6、捆扎机器人向前行使,对待捆扎的钢筋交叉点进行捆扎作业,且捆扎机器人完成转向动作,直至遍历钢筋框架上层的所有钢筋交叉点。
在本实施例中,获取钢筋框架上层的钢筋交叉点,捆扎机器人能够遍历所有的钢筋交叉点;捆扎机器人能够一次捆扎多处钢筋交叉点,使得捆扎机器人能够在最短的时间内完成钢筋交叉点处的捆扎作业;通过判断捆扎机器人每次的捆扎作业是否正确捆扎在钢筋交叉点处,确保钢筋框架的捆扎质量;上述的技术方案提高了钢筋捆扎的效率,通过机器自动化捆扎,降低了工人的劳动强度。
为进一步优化方案,可在步骤S2的中测定钢筋的粗细,由此计算出完成捆扎作业的最少用丝量。通过捆扎机器人上的钢丝量与计算出的最少用丝量进行比对,以确保捆扎机器人上的钢丝是否足量。若比对后发现捆扎机器人上的钢丝不足量,工人可提前备料,将钢丝卷放置在工作区域内。
另外,可根据获取的钢筋交叉点信息,通过捆扎机器人内的信息处理单元,模拟出捆扎机器人的最佳行走路线,捆扎机器人按照最佳行走路线运行,缩减完成钢筋框架捆扎所需的时间。
在本实施例中,机器人包括多个捆扎单元,当捆扎单元上的钢丝即将用完时,机器人发出预警,以便于工人清楚捆扎机器人内的钢丝情况。
若存在一个捆扎单元上的钢丝用完,工人无法及时对这一捆扎单元进行上丝时,则停止这一捆扎单元的捆扎动作,其余捆扎单元继续工作,并根据余下待捆扎的钢筋交叉点,重新确定捆扎机器人的最佳行走路线,保证不停机作业,缩减完成钢筋框架捆扎所需的时间。同样的,可工作的捆扎单元的数量逐个减少时,则可工作的捆扎单元对钢筋交叉点进行捆扎作业。若所有的捆扎单元上的钢丝用完,则捆扎单元停止工作,捆扎机器人运行至钢筋框架的边缘处,以便于工人对捆扎单元进行上丝作业,减少工人的工作量。
另外,所有的捆扎单元上的钢丝用完时,捆扎机器人才能够回到钢筋框架的边缘处,工人完成对捆扎单元的上丝作业。若部分捆扎单元能够进行捆扎作业,部分捆扎单元无法进行捆扎作业,导致对钢筋框架的捆扎作业的效率变低,工人对捆扎单元进行上丝时,需要停止捆扎机器人行驶,且进入到钢筋框架内,完成捆扎单元的上丝作业,导致捆扎单元的上丝作业极为麻烦。
通过控制捆扎机器人运行至钢筋框架的边缘处,则便于对捆扎单元进行上丝作业。捆扎机器人通过信号连接有远程控制单元,远程控制单元可以为手机、平板或电脑的任一种,远程控制单元可接收机器人的工作信息,远程控制单元可控制机器人运行至钢筋框架的边缘处,完成捆扎单元的上丝作业,确保钢筋捆扎的效率,能够在最短的时间内完成钢筋框架的捆扎作业。
在使用过程中,会发生捆扎单元无法自动剪切钢丝的情况,可在捆扎机器人上设置被动裁切单元。捆扎机器人上的捆扎单元在捆扎钢筋后,捆扎单元无法自动剪断钢丝,机器人发出警报,停止这一捆扎单元的运行,同时被动裁切单元切断钢丝,则其余的捆扎单元能够继续捆扎钢筋,确保捆扎机器人的不停机作业,缩减完成钢筋框架捆扎所需的时间。
完成钢筋框架的钢丝捆扎作业后,对无法进行正常剪切钢丝的捆绑单元进行维修,以保证捆扎机器人进行下一次的钢筋捆扎作业时,所有的捆扎单元均能够正常运行。
在本实施例中,捆扎单元为自动钢丝捆扎机,被动裁切单元为自动切割机。
本申请实施例一种钢丝网的智能捆扎方法的实施原理为:
获取钢筋框架上层的钢筋交叉点,捆扎机器人捆扎钢筋交叉点的作业中,捆扎机器人能够遍历所有的钢筋交叉点;捆扎机器人能够一次捆扎多处钢筋交叉点,提高捆扎效率,使得捆扎机器人能够在最短的时间内完成钢筋交叉点处的捆扎作业;通过判断机器人每次的捆扎作业是否正确捆扎在钢筋交叉点处,确保钢筋框架的捆扎质量;本申请提高了钢筋捆扎的效率,通过机器自动化捆扎,降低了工人的劳动强度。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、行走、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种钢筋网的智能捆扎方法
- 一种捆扎器及剪力墙钢筋网结构施工方法