一种射频指纹识别方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及一种射频指纹识别方法,属于机器学习、物理层安全与信号分类技术领域。
背景技术
由于无线网络的开放性,加大了其遭受非法用户接入以及大规模恶意攻击的风险,并已经成为严重阻碍无线网络技术发展应用的因素之一。“射频指纹”是通过分析设备的无线信号,提取得到的设备独特特征,是设备的物理层本质特征,只与设备本身的硬件特征相关。利用射频指纹对不同的无线设备的身份进行识别可以有效发现伪装身份的无线设备,从而提高无线网络的安全性。通过将接收到的信号变换为星座轨迹图获得其统计特征,可以在不获得设备发射信号先验知识的前提下进行设备的射频指纹特征提取,适用于物理层安全以及无线接入设备的身份识别及认证。由于不同无线设备的载波频率偏移不同,其星座轨迹图所产生的相位旋转也不同。因此可以通过考察差分星座轨迹图中相位旋转的相似程度,来判断不同信号是否来自于同样的无线设备,以此作为无线设备身份识别的依据。
支持向量机(support vector machines,SVM)是一种二分类模型,包括一类支持向量机和二类支持向量机。传统SVM模型为线性分类器且模型是定义在特征空间上的最大间隔线性分类器。SVM的学习策略为间隔最大化,本质为一个求解凸二次规划问题,也等价于正则化合页损失函数最小化问题。相较于二类支持向量机,SV-means属于一种一类支持向量机(one-class SVM)模型,该模型在训练时只需一种类型的数据,且将原点看做与提供的训练集不同的另一类数据。该模型进行训练不需要同时提供带有正标签(positivelabel,PL)的数据和带有负标签(negative label,NL)的数据。与二类支持向量机相比,一类支持向量机更适合应用于异常检测、单训练样本识别等实际问题。
本发明的目的是致力于解决上述算法在时间复杂度和算法复杂度较高的技术缺陷,同时保证较高的分类准确率。在分类准确度方面,SV-means方法与SVM、BPNN、CNN的准确率相当;然而,在复杂度方面,SV-means的优势凸显:该方法具有极低的运算复杂度,进而导致算法时间延迟极低,这使得该方法更适合小样本的分类。
发明内容
本发明的目的在于针对现有射频指纹识别算法存在准确度低、复杂度较低,提出了一种射频指纹识别方法,通过将接收到的信号变换成星座轨迹图,再对星座轨迹图进行聚类,得到聚类中心点,并计算各个类簇的类内平均距离以及类内距离和,将相应类簇的类内平均距离以及类内距离和构建为特征向量,作为设备的射频指纹特征,再进行分类,即根据特征对设备进行识别。
为了达到上述目的,本发明采取如下技术方案。
所述射频指纹识别方法,依托的系统包括M个发送设备、接收机;每段信号采集N段样本;信噪比范围是5到25dB;
步骤1、M个不同的设备发射调制信号,接收机收到信号后处理得到星座轨迹图,具体包括如下子步骤:
步骤1.1、每段信号采集N段样本,采用满足奈奎斯特定律所需要的采样率进行采样,并对采样信号的能量进行归一化;
步骤1.2、对步骤1.1输出的能量归一化信号中的I路和Q路信号分别使用延迟器分别控制I路和Q路的延迟,并按照一定的间隔进行差分处理;
步骤1.3、将步骤1.2输出的差分后的信号,直接绘制在以I路和Q路为坐标轴的空间中,得到对应的星座轨迹图;
步骤2、对步骤1.3的输出星座轨迹图中的星座点进行聚类,计算类内距离和以及类内平均距离向量、以得到的聚类中心点作为射频指纹,构建特征向量集;
步骤2、具体为:
步骤2.1、对步骤1输出星座轨迹图中的星座点进行聚类,获得星座轨迹图分布密集点的不同聚类中心;
步骤2.2、根据步骤2.1获得的星座轨迹图分布密集点的不同聚类中心,计算各类簇的类内距离和以及类内平均距离向量;
步骤2.3、将计算得到的各类簇的类内距离和以及类内平均距离向量,按照各类簇聚类中心点的相位大小顺时针排序,得到排序后的各类簇的类内距离和以及类内平均距离向量,并组成特征向量集;
步骤2.4、遍历不同信噪比以及M个设备,重复步骤1到步骤2.3,得到不同信噪比情况下的不同设备信号提取的特征向量集;
步骤3、从特征向量集中选取A组特征向量作为分类的训练样本和B组作为测试样本进行分类,且分别将训练样本以及测试样本构成训练集和测试集;
步骤4、使用训练集进行训练,得到训练好的分类模型参数;
其中,分类模型参数包括权重向量和分离间隔;且权重向量特征空间的分离超平面的法向量,记为w;分离间隔为分离面和坐标原点的间隔,记为ρ;
步骤4,具体过程包括如下子步骤:
步骤4.1、对训练集中的训练样本进行随机傅里叶特征变换,得到随机傅里叶特征变换后的特征向量数据集Z;
其中,随机傅里叶特征变换计算公式为式(1):
其中,x
步骤4.2、从随机傅里叶特征变换后的特征向量数据集Z中随机选择一个数据点作为初始权重向量w;
步骤4.3、基于w通过黄金分割线搜索计算分离间隔ρ;
步骤4.4、对所有计算wz(x
其中,x
步骤4.5、通过随机梯度下降方法计算w和w
其中,用w
步骤4.6、重复步骤4.3至步骤4.5,直至K次迭代后w基本趋于稳定,记w为最优权重向量w
其中,K的取值范围大于15小于50,基本趋于稳定的条件为w的模差值小于0.0001;
其中,最优权重向量w
步骤5、对测试集进行分类,具体包括如下子步骤:
步骤5.1、对测试集进行随机傅里叶特征变换,根据公式(1)得到随机傅里叶特征变换,得到测试特征向量数据集Z
步骤5.2、根据步骤4训练得到的w
其中,P的维数为1×n
步骤5.3、根据步骤5.2得到P的元素值进行判断,具体为:若P(v)≥0,则测试集中第v个元素对应的待分类数据与训练集数据是同类;否则,若P(v)<0,则测试集中第v个元素对应的待分类数据与训练集数据是异类;
其中,v的取值范围为1到n
有益效果
本发明所述的一种射频指纹识别方法,与现有技术相比,具有如下有益效果:
1.所述方法对于小样本的准确率高;
2.所述方法的时间复杂度和空间复杂度低;
3.所述方法相较于瞬态信号,稳态信号的射频指纹包含了更多无线设备的硬件信息,因此更易提取且分类识别性能更加稳定;
4.所述方法相较于信号分布的形状图像识别,预处理过程相对简单。
附图说明
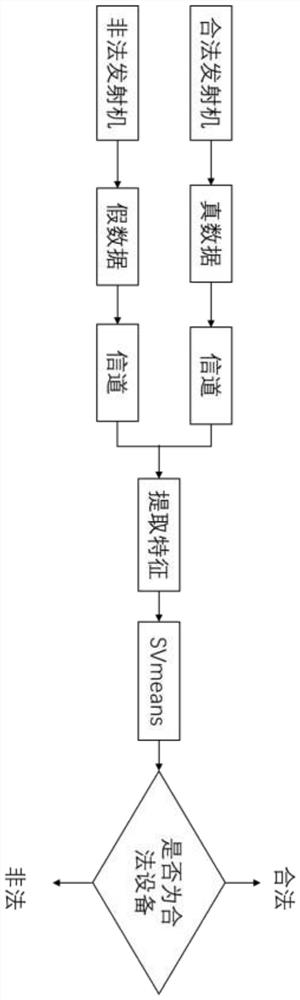
图1是采用本发明所述一种射频指纹识别方法针对合法非法两类设备区分的流程示意图;
图2是本发明所述一种种射频指纹识别方法针对多类设备区分的流程示意图。
具体实施方式
下面结合附图和实施例对本发明所述的一种射频指纹识别方法做进一步说明和详细描述。
实施例1
本实例详细阐述了本发明一种射频指纹识别方法针对合法、非法设备分类的具体实施,图1为二分类流程示意图。
通常用来刻画射频指纹的是无线设备的基带稳态响应特征,主要包括载波频率偏移、同步信号相关值、基带I/Q两路信号偏移、解调信号的幅度和相位误差等。发射机设备硬件缺陷会引起调制误差,调制误差又会影响到星座图的分布利用调制误差或者星座图来提取设备的射频指纹,以区分不同的设备个体。
发射机和接收机存在着载波频率偏差,不同的设备有不同的频偏;实际操作时,一般多台发射机都有自有的频偏和相差,接收机为同一个,通过差分处理得到星座图,放大偏差,通过提取特征,对设备进行识别。
仿真时,合法和非法就是在接收端人为的设置不同的相偏和频偏,得到不同的星座图,然后存起来。测试时,只用其中一种相偏和频偏,相符就是合法,不相符就是非法,合法和非法就是二分类。
所述方法,具体实施时,步骤如下:
步骤1、M为1时,待识别设备号记为1,发射QPSK调制信号;接收机收到信号,N取1,对1段信号进行处理得到的信号星座图数据,具体包括如下子步骤:
步骤1.1、采用满足奈奎斯特定律所需要的采样率进行采样,并对采样信号的能量进行归一化;
步骤1.2、接收端接收无线设备基带的I/Q信号;对I路和Q路采样后的信号使用延迟器分别控制I路和Q路的延迟,按照一定的间隔进行差分处理,通过差分得到稳定的星座图,差分处理如公式(2)所示:
式中,X(t)为发射机的基带信号,Y(t)为变频后的基带信号,Y*是取共轭值,n是差分的间隔。
步骤1.3、将接收信号直接绘制在以I路和Q路为坐标轴的空间中,得到对应的星座轨迹图;
步骤2、通过k-means聚类算法获得星座轨迹图分布密集点的不同聚类中心,以得到的聚类中心点作为射频指纹具体为:
步骤2.1、使用k-means聚类对接收信号进行聚类,得到聚类结果;
步骤2.2、根据步骤2.1的聚类结果,计算各类簇的类内距离和以及类内平均距离向量;
步骤2.3、将计算得到的各类簇的类内距离和以及类内平均距离向量,按照各类簇聚类中心点的相位大小顺时针排序,得到排序后的各类簇的类内距离和以及类内平均距离向量,并组成特征向量集;
步骤3、根据不同信噪比情况下的信号样本提取的特征向量集,从中选取A组特征向量作为分类的训练样本和B组作为测试样本,使用SV-means进行分类,得到分类准确度,具体过程包括如下子步骤:
步骤3.1具体实施时,随机傅里叶特征变换计算公式为(3):
其中,z(x
此步骤将数据维度d
步骤3.2、从数据集合z中随机选择一个数据作为初始权重向量w0;
步骤3.3、通过黄金分割线搜索计算分离距离ρ;
步骤3.4、对于wz-ρ小于0的数据点进行聚类,再求平均后得到平均权重向量;
其中,平均权重向量记为w
步骤3.5、通过随机梯度下降法选择w和w
步骤3.6、重复步骤3.3至步骤3.5,直至S次迭代后,得到趋于稳定的w
步骤4、根据计算的w、ρ进行分类;记录不同信噪比下的分类准确率,计算在每个特定信噪比下的平均分类准确率,结果如表1所示。
表1单设备条件下每个特定信噪比下的平均分类准确率
实施例2
仿真时,M台多分类,取N段数据,实际仿真只取一段数据。接收端人为的设置不同的相偏和频偏,得到不同的星座图,然后存起来。测试时,通过几次修改输入信号的相偏和频偏,对不同的设备进行识别;
所述射频指纹识别方法依托的系统,具体包括如下步骤:
步骤1、M为1时,待识别设备号记为1,发射QPSK调制信号;接收机收到信号,N取1,对1段信号进行处理得到的信号星座图数据,具体包括如下子步骤:
步骤1.1、采用满足奈奎斯特定律所需要的采样率进行采样,并对采样信号的能量进行归一化;
步骤1.2、接收端接收无线设备基带的I/Q信号;对I路和Q路采样后的信号使用延迟器分别控制I路和Q路的延迟,按照一定的间隔进行差分处理,通过差分得到稳定的星座图。差分处理如公式(2)所示:
式中,X(t)为发射机的基带信号,Y(t)为变频后的基带信号,Y*是取共轭值,n是差分的间隔。
步骤1.3、将接收信号直接绘制在以I路和Q路为坐标轴的空间中,得到对应的星座轨迹图;
步骤2、将每个样本点到原点的欧式距离作为特征向量集;
步骤3、根据不同信噪比情况下的信号样本提取的特征向量集,从中选取A组特征向量作为分类的训练样本和B组作为测试样本,使用SV-means进行分类,得到分类准确度,具体过程包括如下子步骤:
步骤3.1、对特征进行随机傅里叶特征变换,得到随机傅里叶特征变换后的数据集合z;
步骤3.2、从数据集合z中随机选择一个数据作为初始权重向量w0;
步骤3.3、通过黄金分割线搜索计算分离距离ρ;
步骤3.4、对于wz-ρ小于0的数据点进行聚类,再求平均后得到平均权重向量;其中,平均权重向量记为w
步骤3.5、通过随机梯度下降法选择w和w
步骤3.6、重复步骤3.3至步骤3.5,直至S次迭代后,得到趋于稳定的w
步骤4、根据计算的w、ρ进行分类;记录不同信噪比下的分类准确率,计算在每个特定信噪比下的平均分类准确率。
实施例3
所述射频指纹识别方法依托的系统具体包括如下步骤:
步骤1、M为3时,待识别设备号分别记为1,2,3,发射QPSK调制信号;接收机收到信号,N取1,对1段信号进行处理得到的信号星座图数据,接收机收到信号后,处理得到的信号星座图数据,具体包括如下子步骤:
步骤1.1、采用满足奈奎斯特定律所需要的采样率进行采样,并对采样信号的能量进行归一化;
步骤1.2、接收端接收无线设备基带的I/Q信号;对I路和Q路采样后的信号使用延迟器分别控制I路和Q路的延迟,按照一定的间隔进行差分处理,通过差分得到稳定的星座图。差分处理如公式(2)所示:
式中,X(t)为发射机的基带信号,Y(t)为变频后的基带信号,Y*是取共轭值,n是差分的间隔。
步骤1.3、将接收信号直接绘制在以I路和Q路为坐标轴的空间中,得到对应的星座轨迹图;
步骤2、通过k-means聚类算法获得星座轨迹图分布密集点的不同聚类中心,以得到的聚类中心点作为射频指纹具体为:
步骤2.1、使用k-means聚类对接收信号进行聚类,得到聚类结果;
步骤2.2、根据步骤2.1的聚类结果,计算不同设备间聚类中心点的欧式距离;
步骤2.3、然后取前K次聚类中心点的平均值作为参考聚类中心点,再计算前L次聚类中心点到参考聚类中心点间的欧式距离,以这个平均值作为参考聚类中心点;
步骤3:获得设备f的聚类中心信息后,针对新输入的设备f,计算其聚类中心的欧式距离和,作为特征向量;利用SV-means进行分类,得到分类准确度,具体过程包括如下子步骤:
步骤3.1、对特征进行随机傅里叶特征变换,得到随机傅里叶特征变换后的数据集合z;
此步骤将数据维度d
步骤3.2、从数据集合z中随机选择一个数据作为初始权重向量w0;
步骤3.3、通过黄金分割线搜索计算分离距离ρ;
步骤3.4、对于wz-ρ小于0的数据点进行聚类,再求平均后得到平均权重向量;
其中,平均权重向量记为w
步骤3.5、通过随机梯度下降法选择w和w
步骤3.6、重复步骤3.3至步骤3.5,直至S次迭代后,得到趋于稳定的w
步骤4、根据计算的w、ρ进行分类;记录不同信噪比下的分类准确率,计算在每个特定信噪比下的平均分类准确率,结果如表2所示,实现有益效果3和4。
表2本方法与现有算法针对3种不同设备的平均识别率
以上所述为本发明的较佳实施例而已,本发明不应该局限于该实施例和附图所公开的内容。凡是不脱离本发明所公开的精神下完成的等效或修改,都落入本发明保护的范围。
- 一种基于射频指纹的IFF信号识别方法、装置及介质
- 一种基于相参积累消噪的射频指纹特征提取和识别方法