一种棘轮棘爪转轮触发摆针式防坠的爬架
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及建筑爬架领域,尤其涉及一种棘轮棘爪转轮触发摆针式防坠的爬架。
背景技术
目前的爬架,在导轨爬升完成停下来施工时,需要借助若干导座上的顶撑装置与导轨上的导轨防坠孔配合而定位。在每次提升后,顶撑装置要手动操作附到导轨的防坠孔上,工作量大。在施工过程中,爬架需要下降时,许多爬架没有自动防坠装置,靠人工附着工件进行防坠,防坠方面的措施不够完善,存在安全隐患。目前,现有的自动防坠器,其缺陷是导致整个防坠器比较庞大,成本高,故障率高,下降时误动作多,容易污染。
发明内容
本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种棘轮棘爪转轮触发摆针式防坠的爬架。
本发明解决其技术问题所采用的技术方案是:构造一种棘轮棘爪转轮触发摆针式防坠的爬架,包括滑套配合的附墙导座和导轨,所述附墙导座上安装有用于防止所述导轨下坠的防坠器,所述防坠器包括棘轮、棘爪、转轮和防坠摆,所述转轮可转动的安装于所述附墙导座上,所述转轮与所述导轨啮合,所述棘轮与所述转轮同轴设置且可随所述转轮转动,所述防坠摆可摆动地安装于所述附墙导座上,所述棘爪可摆动地固定于所述防坠摆,所述棘轮与所述棘爪接触;
在所述导轨正常下降/上升的过程中,所述棘爪在所述棘轮上的各个棘齿的拨动下摆开后通过自重复位以与所述棘轮上的棘齿顺次啮合,从而使所述棘轮上的棘齿顺次越过所述棘爪;
当所述导轨快速下坠时,所述棘爪在所述棘轮上的棘齿的拨动下摆开并在复位之前与下一个棘齿卡死,从而实现所述转轮与所述防坠摆的联动,所述转轮旋转带动与其联动的所述防坠摆抵住所述导轨进行制动。
优选地,所述棘爪位于所述棘轮上方,所述棘爪包括轻爪和重爪,自由状态下所述重爪与所述棘轮接触且所述轻爪在所述重爪的重力作用下被翘起而无法与所述棘轮;
在所述导轨正常下降/上升的过程中,所述棘轮顺时针/逆时针旋转,所述棘轮的棘齿顺次拨动所述重爪摆开以越过所述重爪,且所述重爪在每一个棘齿越过后复位至自由状态以使所述轻爪无法接触到下一个棘齿;
当所述导轨快速下坠时,所述棘轮顺时针旋转,所述棘轮的棘齿拨动所述重爪摆开以越过所述重爪,并在所述重爪复位之前下一个棘齿与所述轻爪接触后卡死。
优选地,所述棘齿包括凸弧面和凹弧面/平面,凸弧面和凹弧面/平面连接位置形成齿尖,所述重爪包括面向所述轻爪的内斜面和与内斜面背靠背设置的外斜面,内斜面和外斜面连接位置形成爪尖;
所述棘爪的摆动幅度被限制在第一极限位和第二极限位之间,自由状态下所述轻爪与第一极限位抵接,所述重爪的爪尖与所述棘齿的凸弧面接触;
所述棘轮顺时针旋转时推动所述重爪的内斜面,使所述重爪往靠近第二极限位方向摆动,当所述导轨快速下坠时,在所述重爪复位前下一个棘齿与所述轻爪接触,所述轻爪在所述棘齿的带动下克服所述重爪的重力使重爪往第二极限位方向摆动,直至所述重爪与第二极限位抵接时所述棘齿与所述轻爪卡死;
所述棘轮逆时针旋转时所述棘齿的凸弧面给所述重爪的爪尖施加法向力,法向力的水平分力因为所述第一极限位与轻爪的抵接而被抵消,法向力的竖直分力抵消部分所述重爪的重力从而使得所述重爪往靠近第二极限位方向摆动。
优选地,所述棘轮与所述转轮一体成型,所述转轮的至少一侧设置所述棘轮,所述防坠摆和所述转轮均同轴可转动地安装于所述附墙导座上,所述棘爪的转轴与所述防坠摆和所述转轮的转轴平行。
优选地,所述防坠摆的面向所述棘轮的侧壁沿轴向凹陷形成一与所述棘轮匹配的转动腔,所述转动腔的环形腔壁上沿径向凹陷形成一容置槽,所述棘轮置于所述转动腔内,所述棘爪固定在所述容置槽内,所述容置槽的与所述转动腔连接的槽壁提供所述第一极限位和第二极限位来限制所述棘爪的摆动幅度。
优选地,所述防坠摆的数量为两个,两个所述防坠摆镜像设置对接,所述转轮位于两个所述防坠摆之间。
优选地,所述转轮的两侧均设置所述棘轮,两个所述防坠摆中的至少一个安装有所述棘爪。
优选地,所述导轨的滑行面一侧沿自身长度方向排布有一排定位件,相邻的两个所述定位件之间形成定位孔,所述防坠器面向所述滑行面设置;
所述附墙导座上设置有导座挡块,所述防坠摆包括卡阻挡针和防坠挡块,卡阻挡针和防坠挡块与所述滑行面非接触,所述防坠摆在与所述棘轮联动后旋转直至所述卡阻挡针被所述导座挡块阻挡,所述卡阻挡针和防坠挡块之间的角度使得所述卡阻挡针被所述导座挡块阻挡时所述防坠挡块转入所述定位孔内并托起所述定位件。
优选地,所述防坠摆还包括定位挡针和固定安装于所述定位挡针端部的磁铁装置,所述定位挡针、卡阻挡针和防坠挡块顺时针依次分布,所述磁铁装置用于与附墙导座的预定位置吸合,使所述防坠摆约束在所述防坠挡块与所述滑行面之间处于非接触状态,当所述防坠摆与所述棘轮联动后受到的旋转力增大使所述防坠摆摆脱约束开始旋转。
优选地,所述防坠摆还配置有扭簧,所述扭簧用于提供扭力使得在所述自由状态下所述卡阻挡针和防坠挡块与所述滑行面非接触,且所述磁铁装置可以吸附到所述预定位置。
本发明的棘轮棘爪转轮触发摆针式防坠的爬架,具有以下有益效果:本发明中,转轮仅仅负责与导轨啮合带动棘轮转动,转轮要与导轨啮合转动,因此转轮上的转齿的分布必然要稀疏,而棘轮上的棘齿分布相比转轮的转齿的分布密集很多,在导轨下坠时,转过一个棘齿即可触发转轮与所述防坠摆的联动,联动后的转轮旋转带动与防坠摆抵住所述导轨进行制动,整个防坠器的灵敏度非常高;而且转轮并不参与制动,单独利用防坠摆制动,因此转轮可以做的比较单薄,再加上棘轮和棘爪实现转轮与防坠摆联动的方式,使得整个防坠器可以做的比较紧凑。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图:
图1是本发明棘轮棘爪转轮触发摆针式防坠的爬架的结构示意图;
图2是本发明棘轮棘爪转轮触发摆针式防坠的爬架的剖视图;
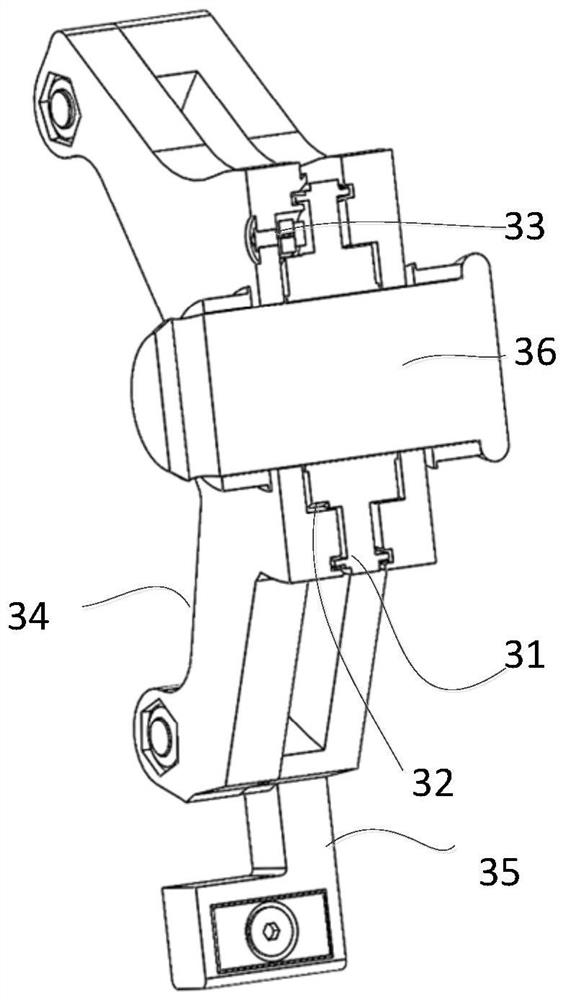
图3是防坠器的组装图;
图4是防坠器的剖视图之一;
图5是防坠器的剖视图之二;
图6是防坠器的分解图;
图7是导轨上升时的原理图;
图8是导轨下坠时的制动原理图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的典型实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
本说明书中使用的“第一”、“第二”等包含序数的术语可用于说明各种构成要素,但是这些构成要素不受这些术语的限定。使用这些术语的目的仅在于将一个构成要素区别于其他构成要素。例如,在不脱离本发明的权利范围的前提下,第一构成要素可被命名为第二构成要素,类似地,第二构成要素也可以被命名为第一构成要素。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明总的思路是:将爬架中的防坠器设计为包括棘轮、棘爪、转轮和防坠摆,所述转轮可转动的安装于所述附墙导座上,所述转轮与所述导轨啮合,所述棘轮与所述转轮同轴设置且可随所述转轮转动,所述防坠摆可摆动地安装于所述附墙导座上,所述棘爪可摆动地固定于所述防坠摆,所述棘轮与所述棘爪接触;在所述导轨正常下降/上升的过程中,所述棘爪在所述棘轮上的各个棘齿的拨动下摆开后通过自重复位以与所述棘轮上的棘齿顺次啮合,从而使所述棘轮上的棘齿顺次越过所述棘爪;当所述导轨快速下坠时,所述棘爪在所述棘轮上的棘齿的拨动下摆开并在复位之前与下一个棘齿卡死,从而实现所述转轮与所述防坠摆的联动,所述转轮旋转带动与其联动的所述防坠摆抵住所述导轨进行制动。
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明,应当理解本发明实施例以及实施例中的具体特征是对本申请技术方案的详细的说明,而不是对本申请技术方案的限定,在不冲突的情况下,本发明实施例以及实施例中的技术特征可以相互组合。
参考图1-2,一种棘轮棘爪转轮触发摆针式防坠的爬架,包括滑套配合的附墙导座2和导轨1。所述导轨1的滑行面一侧沿自身长度方向排布有一排定位件11,相邻的两个所述定位件11之间形成定位孔10。导轨1包括两根竖杆,本实施例中的定位件11主要是连接于两根竖杆之间的小横杆,上下两个相邻的小横杆之间的空间即为定位孔10。其中,所述附墙导座2上安装有面向所述滑行面设置的用于防止所述导轨1下坠的防坠器3。
参考图3-6,所述防坠器3包括棘轮32、棘爪33、转轮31和防坠摆34。所述转轮31可转动的安装于所述附墙导座2上,所述转轮31与所述导轨1啮合,所述棘轮32与所述转轮31同轴设置且可随所述转轮31转动,所述防坠摆34可摆动地安装于所述附墙导座2上,所述棘爪33可摆动地固定于所述防坠摆34,所述棘轮32与所述棘爪33接触。
本实施例中,所述棘轮32与所述转轮31一体成型,所述转轮31的至少一侧设置所述棘轮32,所述防坠摆34和所述转轮31均同轴可转动地安装于所述附墙导座2上,例如,本实施例中,所述防坠摆34和所述转轮31均是安装在转轴36上。所述棘爪33的转轴与所述防坠摆34和所述转轮31的转轴36平行。
在所述导轨1正常下降/上升的过程中,所述棘爪33在所述棘轮32上的各个棘齿的拨动下摆开后通过自重复位以与所述棘轮32上的棘齿顺次啮合,从而使所述棘轮32上的棘齿顺次越过所述棘爪33;当所述导轨1下坠时,所述棘爪33在所述棘轮32上的棘齿的拨动下摆开并在复位之前与下一个棘齿卡死,从而实现所述转轮31与所述防坠摆34的联动,所述转轮31旋转带动与其联动的所述防坠摆34抵住所述导轨1进行制动。
具体的,所述棘爪33位于所述棘轮32上方,这里可以是正上方也可以是稍微偏离正上方。所述棘爪33包括左边的轻爪331和右边的重爪332,自由状态下所述重爪332与所述棘轮32接触且所述轻爪331在所述重爪332的重力作用下被翘起而无法与所述棘轮32。在所述导轨1正常下降/上升的过程中,所述棘轮32顺时针/逆时针旋转,所述棘轮32的棘齿顺次拨动所述重爪332摆开以越过所述重爪332,且所述重爪332在每一个棘齿越过后复位至自由状态以使所述轻爪331无法接触到下一个棘齿;当所述导轨1下坠时,所述棘轮32顺时针旋转,所述棘轮32的棘齿拨动所述重爪332摆开以越过所述重爪332,并在所述重爪332复位之前下一个棘齿与所述轻爪331接触后卡死。
更具体的,所述棘齿包括凸弧面321和凹弧面/平面,凸弧面321和凹弧面/平面连接位置形成齿尖,所述重爪332包括面向所述轻爪331的内斜面和与内斜面背靠背设置的外斜面,内斜面和外斜面连接位置形成爪尖。
所述棘爪33的摆动幅度被限制在第一极限位34a和第二极限位34b之间,自由状态下所述轻爪331与第一极限位34a抵接,所述重爪332的爪尖与所述棘齿的凸弧面321接触。
所述棘轮32顺时针旋转时,与重爪332爪尖接触的棘齿直接转过,下一个棘齿的齿尖最先接触并推动所述重爪332的内斜面,使所述重爪332往靠近第二极限位34b方向摆动,如果导轨1正常下降,则所述重爪332在重力作用下迅速复位,因此下一个棘齿继续推动所述重爪332的内斜面,使所述重爪332往靠近第二极限位34b方向摆动,在整个正常下降过程中,棘爪33与棘轮32呈现实现反复啮合的效果。而当所述导轨1下坠时,重爪332还没来得及复位,下一个棘齿就转过来了,在所述重爪332复位前下一个棘齿与所述轻爪331接触,所述轻爪331在所述棘齿的带动下克服所述重爪332的重力使重爪332往第二极限位34b方向摆动,使得重爪332无法复位,直至所述重爪332与第二极限位34b抵接时整个棘爪33无法继续转动,所以棘齿无法越过轻爪331,所述棘齿与所述轻爪331卡死,如此,棘轮32和棘爪33就相当于卡死了,棘轮32带动棘爪33转动,而棘爪33这个时候抵住第二极限位34b无法自由转动,所以会将旋转力传递给与其连接的防坠摆34,从而实现了棘轮32与防坠摆34的联动。
所述棘轮32逆时针旋转时所述棘齿的凸弧面321给所述重爪332的爪尖施加法向力,法向力垂直于凸弧面321,法向力的水平分力因为所述第一极限位34a与轻爪331的抵接而被抵消,所以轻爪331无法往左边转动,而法向力的竖直分力可以抵消部分所述重爪332的重力从而使得所述重爪332往靠近第二极限位34b方向摆动。这样棘轮32就可以顺利越过重爪332,越过之后,在下一个棘齿转过来之前,重爪332在重力的作用下复位,因此,下一个棘齿基于同样的原理越过重爪332。
继续参考图5-6,本实施例中,在具体装配上,是在所述防坠摆34的面向所述棘轮32的侧壁沿轴向凹陷形成一与所述棘轮32匹配的圆盘型的转动腔340,所述转动腔340的环形腔壁上沿径向凹陷形成一容置槽3401,所述棘轮32置于所述转动腔340内,所述棘爪33固定在所述容置槽3401内,所述容置槽3401的与所述转动腔340连接的槽壁提供所述第一极限位34a和第二极限位34b来限制所述棘爪33的摆动幅度。
可以理解的是,所述防坠摆34的数量可以为一个,也可以为两个,本实施例中为了提高整个防坠器3的稳固性,采用两个防坠摆34。两个所述防坠摆34前后镜像设置对接,所述转轮31位于两个所述防坠摆34之间。同理,所述转轮31可以仅在一侧设置棘轮32,也可以是在两侧均设置所述棘轮32,其中,两个所述防坠摆34中的至少一个安装有所述棘爪33。
结合图2,参考图4-6,所述附墙导座2上设置有导座挡块21,所述防坠摆34包括卡阻挡针342和防坠挡块341,卡阻挡针342和防坠挡块341与所述滑行面非接触,所述防坠摆34在与所述棘轮32联动后旋转直至所述卡阻挡针342被所述导座挡块21阻挡,所述卡阻挡针342和防坠挡块341之间的角度使得所述卡阻挡针342被所述导座挡块21阻挡时所述防坠挡块341转入所述定位孔10内并托起所述定位件11。
优选地,所述防坠摆34还包括定位挡针343和固定安装于所述定位挡针343端部的磁铁装置35,所述定位挡针343、卡阻挡针342和防坠挡块341顺时针依次分布,所述磁铁装置35用于与附墙导座2的预定位置22吸合,使所述防坠摆34约束在所述防坠挡块341与所述滑行面之间处于非接触状态,当所述防坠摆34与所述棘轮32联动后受到的旋转力增大使所述防坠摆34摆脱约束开始旋转。
优选地,所述防坠摆34还配置有扭簧37,比如,可以在转动腔340内紧贴其环形腔壁安装扭簧37,所述扭簧37用于提供扭力使得在所述自由状态下防坠摆34处于图2的状态,即所述卡阻挡针342和防坠挡块341与所述滑行面非接触,且所述磁铁装置35可以吸附到所述预定位置22。
下面结合附图7-8,对本实施例的工作原理进行简单说明:
参考图7,在导轨上升时,棘轮32逆时针旋转,所述棘齿的凸弧面321给所述重爪332的爪尖施加法向力,法向力的水平分力因为所述第一极限位34a与轻爪331的抵接而被抵消,所以轻爪331无法往左边转动,而法向力的竖直分力可以抵消部分所述重爪332的重力从而使得所述重爪332往靠近第二极限位34b方向摆动。这样棘轮32就可以顺利越过重爪332,越过之后,在下一个棘齿转过来之前,重爪332在重力的作用下复位,因此,下一个棘齿基于同样的原理越过重爪332。而且,即使导轨上升速度很快,在与重爪332接触的第一个棘轮32越过之后,重爪332即使来不及复位,则无论是下一个棘齿的凸弧面321碰到重爪332还是之前越过去的棘齿碰到轻爪331,都会带着棘爪33往左边摆动复位到之前的状态,然后基于同样的原理再次越过棘爪33。所以,在上升的过程中,无论导轨速度大小,棘轮32都会顺利越过棘爪33。
在导轨正常下升时,所述棘轮32顺时针旋转时,与重爪332爪尖接触的棘齿直接转过,下一个棘齿的齿尖最先接触并推动所述重爪332的内斜面,使所述重爪332往靠近第二极限位34b方向摆动,所述重爪332在重力作用下迅速复位,因此下一个棘齿继续推动所述重爪332的内斜面,使所述重爪332往靠近第二极限位34b方向摆动,在整个正常下降过程中,棘爪33与棘轮32呈现实现反复啮合的效果。
参考图8,在导轨快速下坠时,所述棘轮32顺时针旋转时,与重爪332爪尖接触的棘齿直接转过,重爪332还没来得及复位,下一个棘齿就转过来了,在所述重爪332复位前下一个棘齿与所述轻爪331接触,所述轻爪331在所述棘齿的带动下克服所述重爪332的重力使重爪332往第二极限位34b方向摆动,使得重爪332无法复位,直至所述重爪332与第二极限位34b抵接时整个棘爪33无法继续转动,所以棘齿无法越过轻爪331,所述棘齿与所述轻爪331卡死,如此,棘轮32和棘爪33就相当于卡死了,棘轮32带动棘爪33转动,而棘爪33这个时候抵住第二极限位34b无法自由转动,所以会将旋转力传递给与其连接的防坠摆34,从而实现了棘轮32与防坠摆34的联动,防坠摆34摆脱磁铁装置35的吸力和扭簧37的扭力,防坠摆34顺时针旋转,防坠挡块341转入定位孔10,此时卡阻挡针342转动到被所述导座挡块21阻挡,因此防坠摆34无法继续转动,防坠挡块341托起导轨1,实现对导轨1的紧急制动。
本实施例的有益效果是:转轮仅仅负责与导轨啮合带动棘轮转动,转轮要与导轨啮合转动,因此转轮上的转齿的分布必然要稀疏,否则无法啮合,而棘轮上的棘齿分布相比转轮的转齿的分布密集很多,在导轨下坠时,转过一个棘齿即可触发转轮与所述防坠摆的联动,联动后的转轮旋转带动与防坠摆抵住所述导轨进行制动,整个防坠器的灵敏度非常高;而且转轮并不参与制动,单独利用防坠摆制动,因此转轮可以做的比较单薄,再加上棘轮和棘爪实现转轮与防坠摆联动的方式,使得整个防坠器可以做的比较紧凑。
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
- 一种棘轮棘爪转轮触发摆针式防坠的爬架
- 一种接触式转轮离心触发防坠爬架