建筑施工用水平移动式搭载平台及其使用方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及绿色建造施工技术领域,特别是建筑施工用水平移动式搭载平台及其使用方法。
背景技术
建筑施工中,需要采用不同的建筑材料、工艺、操作方式,这是一个技术复杂的生产过程,同时需要使用到各种建筑机械、设备和工具进行辅助,而在建筑工地中,最容易见到的就是各种搭载平台或脚手架结构,尤其对高位施工时,更是需要搭设安全、稳定的施工平台,便于施工人员活动工作。
而传统的搭载平台大多采用固定式结构,为了保证其搭载稳定和安全性,大多不便于变换,当前施工区域使用完毕后整体迁移至下一施工区域时就需要拆卸平台后再次组装,不仅麻烦,而且耗时耗力,效率较低。
发明内容
本发明所要解决的技术问题是提供建筑施工用水平移动式搭载平台及其使用方法,通过差位配合的摆臂结构实现水平移动,整体结构稳定,移动过程中平稳安全,非常便利;限位支撑结构调节方便,相较于电动或气动结构更加简单,设计成本低,结构实用;整体移动顺畅,结构稳定,安全性强,极大提升了高位水平施工的效率。
为解决上述技术问题,本发明所采用的技术方案是:建筑施工用水平移动式搭载平台及其使用方法,包括平台结构,其特征在于:所述的平台结构的底部设有移动支撑结构;
所述的移动支撑结构包括底座,底座上设有分列两侧并交错配合的第一支撑座、第二支撑座、第一配合座、第二配合座和多组限位支撑结构,第一支撑座通过设置于第一动力臂一端上的连接轴与其铰接,第一动力臂的另一端通过连接轴与第一支撑臂的一端铰接,第二支撑座通过设置于第二动力臂一端上的连接轴与其铰接,第二动力臂的另一端通过连接轴与第二支撑臂的一端铰接,第一配合座通过连接轴与第三支撑臂的一端铰接,第三支撑臂的另一端通过连接轴与第一支撑臂铰接,第二配合座通过连接轴与第四支撑臂的一端铰接,第四支撑臂的另一端通过连接轴与第二支撑臂铰接,第一支撑臂和第二支撑臂的另一端均通过连杆与设置于平台结构底部的第一连接座铰接,位于第一支撑臂和第二支撑臂远离连杆一端的连接轴通过同步架连接,第一支撑座通过固定座与电机连接,电机的输出端与设置于第一支撑座上的连接轴连接。
优选的方案中,所述的平台结构包括平台板,平台板上设有多个护栏结构和多组防滑纹路。
优选的方案中,所述的底座上设有推杆、爬梯结构和多组自锁万向轮。
优选的方案中,所述的底座的底部设有配重座。
优选的方案中,所述的限位支撑结构包括对称设置于底座上的安装架,安装架上设有双头丝杆,双头丝杆的两端设有手轮,双头丝杆上设有对称设置并与其螺纹配合的移动套,移动套通过连接轴与限位臂的一端铰接,限位臂的另一端通过连接轴与设置在防滑底板上的第二连接座铰接,限位臂上设有定位槽,限位臂与设置在底座上的限位槽相配合,限位槽内设有与定位槽配合的定位杆。
优选的方案中,所述的双头丝杆上位于对称位置的外螺纹的螺纹方向相反。
本发明所提供的建筑施工用水平移动式搭载平台及其使用方法,通过采用上述结构,具有以下有益效果:
(1)通过差位配合的摆臂结构实现水平移动,整体结构稳定,移动过程中平稳安全,非常便利;
(2)限位支撑结构调节方便,相较于电动或气动结构更加简单,设计成本低,结构实用;
(3)整体移动顺畅,结构稳定,安全性强,极大提升了高位水平施工的效率。
附图说明
下面结合附图和实施例对本发明作进一步说明:
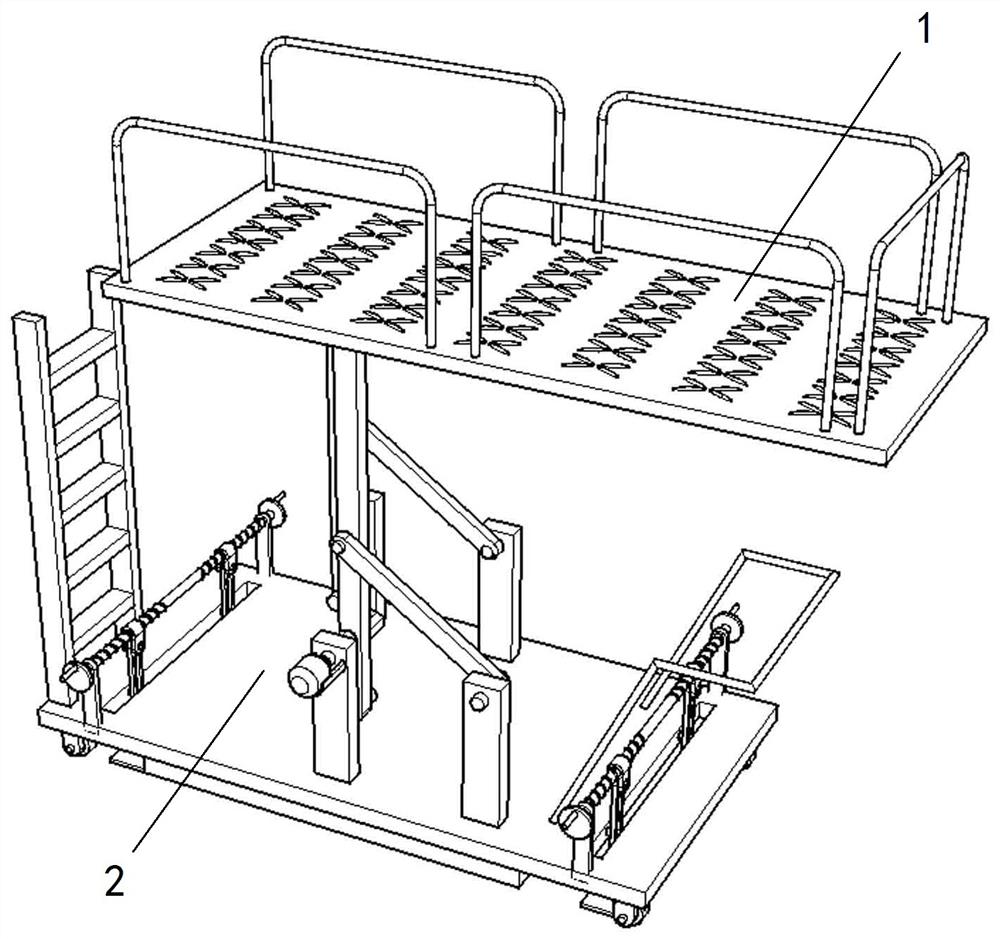
图1为本发明的整体结构基础状态示意图。
图2为本发明的整体结构平移状态示意图。
图3为本发明的整体结构双状态示意图。
图4为本发明的平台结构示意图。
图5为本发明的底座及调节结构示意图。
图6为本发明的底座结构示意图。
图7为本发明的限位支撑结构示意图。
图中:平台结构1,移动支撑结构2,平台板3,护栏结构4,防滑纹路5,底座6,第一支撑座7,第二支撑座8,第一配合座9,第二配合座10,连接轴11,第一动力臂12,第二动力臂13,同步架14,第一支撑臂15,第二支撑臂16,连杆17,第一连接座18,第三支撑臂19,第四支撑臂20,电机21,固定座22,推杆23,爬梯结构24,自锁万向轮25,配重座26,限位槽27,定位杆28,限位支撑结构29,安装架30,双头丝杆31,手轮32,移动套33,限位臂34,定位槽35,第二连接座36,防滑底板37。
具体实施方式
实施例一:
如图1-7中,建筑施工用水平移动式搭载平台及其使用方法,包括平台结构1,其特征在于:所述的平台结构1的底部设有移动支撑结构2;
所述的移动支撑结构2包括底座6,底座6上设有分列两侧并交错配合的第一支撑座7、第二支撑座8、第一配合座9、第二配合座10和多组限位支撑结构29,第一支撑座7通过设置于第一动力臂12一端上的连接轴11与其铰接,第一动力臂12的另一端通过连接轴11与第一支撑臂15的一端铰接,第二支撑座7通过设置于第二动力臂13一端上的连接轴11与其铰接,第二动力臂13的另一端通过连接轴11与第二支撑臂16的一端铰接,第一配合座9通过连接轴11与第三支撑臂19的一端铰接,第三支撑臂19的另一端通过连接轴11与第一支撑臂15铰接,第二配合座10通过连接轴11与第四支撑臂20的一端铰接,第四支撑臂20的另一端通过连接轴11与第二支撑臂16铰接,第一支撑臂15和第二支撑臂16的另一端均通过连杆17与设置于平台结构1底部的第一连接座18铰接,位于第一支撑臂15和第二支撑臂16远离连杆17一端的连接轴11通过同步架14连接,第一支撑座7通过固定座22与电机21连接,电机21的输出端与设置于第一支撑座7上的连接轴11连接。
优选的方案中,所述的平台结构1包括平台板3,平台板3上设有多个护栏结构4和多组防滑纹路5。防滑效果好,安全性高。
优选的方案中,所述的底座6上设有推杆23、爬梯结构24和多组自锁万向轮25。便于使用,移动调整方便。
优选的方案中,所述的底座6的底部设有配重座26。稳定重心,保证水平移动后施工人员在装置上的稳定行走安全。
优选的方案中,所述的限位支撑结构29包括对称设置于底座6上的安装架30,安装架30上设有双头丝杆31,双头丝杆31的两端设有手轮32,双头丝杆31上设有对称设置并与其螺纹配合的移动套33,移动套33通过连接轴11与限位臂34的一端铰接,限位臂34的另一端通过连接轴11与设置在防滑底板37上的第二连接座36铰接,限位臂34上设有定位槽35,限位臂34与设置在底座6上的限位槽27相配合,限位槽27内设有与定位槽35配合的定位杆28。限位支撑结构调节方便,相较于电动或气动结构更加简单,设计成本低,结构实用。
优选的方案中,所述的双头丝杆31上位于对称位置的外螺纹的螺纹方向相反。便于使用收放,方便快捷。
实施例二:
本发明的使用方法为:使用时,施工人员预先将本装置放置于施工区域的一端,接着转动手轮32控制限位臂34转动使防滑底板37与地面顶紧支撑稳定,然后通过爬梯结构24进入平台结构1,进行高位施工操作,待该位置施工完毕后需要水平移动时,通过电机21控制第一动力臂12和第二动力臂13转动,带动第一支撑臂15和第二支撑臂16转动,在第三支撑臂19和第四支撑臂20的配合下实现水平移动,极大便利了高位水平施工作业的便捷性。
本发明的有益效果:通过差位配合的摆臂结构实现水平移动,整体结构稳定,移动过程中平稳安全,非常便利;限位支撑结构调节方便,相较于电动或气动结构更加简单,设计成本低,结构实用;整体移动顺畅,结构稳定,安全性强,极大提升了高位水平施工的效率。
- 建筑施工用水平移动式搭载平台及其使用方法
- 一种移动式建筑施工平台及其使用方法