一种可调恒力机构
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及恒力控制技术领域,特别是涉及一种可调恒力机构。
背景技术
恒力机构在一定位移范围内,能提供几乎恒定的输出力,对于位移输入不 确定同时须保证反作用力恒定的情况,恒力机构尤为重要,例如,轮廓检测、 机械夹持和机器人末端执行机构等。目前获取恒力的方法主要有:基于反馈控 制的主动恒力系统和被动恒力机构,基于反馈控制的主动恒力系统可以实现力 的精确控制,但是该系统结构复杂、体积较大、成本高。
现有的被动恒力机构主要为弹簧钢卷成的恒扭弹簧或基于凸轮的恒力机 构等,其中,弹簧钢卷成的恒扭弹簧存在输出恒力的大小无法调节等问题。专 利号为201610003886.4的中国专利公开了一种可调节恒力机构(基于凸轮的 恒力机构),该机构利用凸轮机构负刚度特性与线性弹簧正刚度特性组合,通 过凸轮和两个水平移动组件(包括线性弹簧)同时接触并推动两个水平移动组 件水平运动,实现恒力并输出。虽然通过调节线性弹簧预压缩量可以改变输出 恒力的大小,但是该装置的凸轮机构加工完成后,需要与指定刚度的线性弹簧 匹配使用,互换性差,且对凸轮及与之匹配的线性弹簧等的加工精度要求较高; 凸轮轮廓复杂且需要较高的加工精度,不便于加工;凸轮和两个水平移动组件 之间存在摩擦磨损,精度和使用寿命较低。
发明内容
本发明的目的是提供一种可调恒力机构,以解决上述现有技术存在的问题, 结构简单,对加工精度要求较低,便于加工,摩擦损耗小,避免了由于磨损而 导致精度降低,提高了使用寿命。
为实现上述目的,本发明提供了如下方案:
本发明提供了一种可调恒力机构,包括外壳、输出轴、环形定子、环形动 子和正刚度机构,所述环形定子套设在所述外壳内并与所述外壳固定连接,所 述环形动子套设在所述环形定子内并与所述环形定子留有间隙,所述输出轴与 所述环形动子和所述正刚度机构均固定连接,所述输出轴设于所述外壳内部并 与所述外壳转动连接,所述输出轴能够沿所述输出轴的轴线方向移动,所述环 形动子在所述环形定子的内腔内的磁场的作用下能够为所述输出轴提供第一 作用力,所述正刚度机构能够为所述输出轴提供第二作用力,所述第一作用力 与所述第二作用力的方向相反且共线,所述第一作用力随所述输出轴的位移的 变化量大小与所述第二作用力随所述输出轴的位移的变化量大小相同。
优选的,所述正刚度机构为弹性部件,所述正刚度机构的刚度为定值,所 述弹性部件具有预压缩量,所述环形定子与所述环形动子的轴线共线。
优选的,所述环形定子为第一线圈,所述环形动子为第二线圈,所述第一 线圈和所述第二线圈中的电流方向相反。
优选的,所述环形定子为第三线圈,所述环形动子为第一永磁体,所述第 一永磁体的充磁方向平行于所述输出轴的轴线方向,所述第三线圈通入电流后 中心的磁场方向与所述第一永磁体的充磁方向相反。
优选的,所述环形定子为第二永磁体,所述环形动子为第三永磁体,所述 第二永磁体和所述第三永磁体的充磁方向均平行于所述输出轴的轴线方向,所 述第二永磁体和所述第三永磁体的充磁方向相同。
优选的,所述环形定子为第四永磁体,所述环形动子为第四线圈,所述第 四永磁体的充磁方向平行于所述输出轴的轴线方向,所述第四线圈通入电流后 中心的磁场方向与所述第四永磁体的充磁方向相反。
优选的,所述环形定子和所述环形动子均为多个且数量相同,多个所述环 形定子均与所述外壳均固定连接且沿所述输出轴的轴线方向布置,多个所述环 形定子中任意两个相邻的所述环形定子之间均留有等距离的间隙,各所述环形 动子套设在各所述环形定子内并与径向相对的所述环形定子留有间隙,多个所 述环形动子均与所述输出轴固定连接且沿所述输出轴的轴线方向布置,多个所 述环形动子中任意两个相邻的所述环形动子之间均留有等距离的间隙。
优选的,还包括调节机构,所述调节机构设于所述外壳的内部,所述弹性 部件的一端与所述输出轴固定连接,所述调节机构的输出端与所述弹性部件的 另一端固定连接,所述调节机构能够调节所述弹性部件的所述预压缩量。
优选的,所述调节机构包括蜗轮蜗杆传动机构、连接轴、连接块和导向轴, 所述导向轴的一端与所述外壳固定连接,所述导向轴的另一端与所述连接块滑 动连接,所述导向轴的轴线与所述连接轴的轴线相互平行,所述蜗轮蜗杆传动 机构的蜗轮套设在所述连接轴外并与所述连接轴的一端固定连接,所述连接轴 的另一端与所述连接块螺纹连接,所述蜗轮蜗杆传动机构的蜗杆的端部伸出至 所述外壳外,所述连接轴远离所述连接块的端部与所述外壳转动连接,所述连 接块与所述正刚性机构固定连接。
优选的,所述调节机构还包括调节开关,所述外壳设有安装孔,所述蜗轮 蜗杆传动机构的蜗杆的输入端穿过所述安装孔与所述调节开关固定连接,所述 外壳包括第一筒体、第二筒体和基座,所述第一筒体的一端与所述第二筒体的 一端固定连接,所述第二筒体的另一端与所述基座固定连接,所述输出轴的一 端转动连接于所述第一筒体的一端,所述输出轴的另一端与所述第二筒体靠近 所述第一筒体的一端转动连接,所述基座与所述连接轴远离所述连接块的端部 转动连接,所述环形定子套设在所述第一筒体内并与所述第一筒体固定连接, 所述正刚度机构设于所述第二筒体内,所述连接轴的轴线与所述输出轴的轴线 共线,所述弹性部件为弹簧。
本发明相对于现有技术取得了以下技术效果:
本发明提供的可调恒力机构中环形动子和正刚度机构分别为输出轴提供 第一作用力和第二作用力,第一作用力与第二作用力的方向相反且共线,第一 作用力随输出轴的位移的变化量大小与第二作用力随输出轴的位移的变化量 大小相同,使输出轴在沿自身轴线方向运动时受到的作用力始终与初始位置时 的受力相同,实现了恒力输出。利用环形定子作用于环形动子上的磁场力对输 出轴进行力的输出,环形定子和环形动子之间无接触,环形定子、环形动子和 正刚度机构之间无接触,减小了摩擦损耗,避免了由于磨损而导致精度降低, 提高了使用寿命;环形定子和环形动子结构简单且不需要较高的加工精度,便 于加工。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是 本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的 前提下,还可以根据这些附图获得其他的附图。
图1为本发明提供的可调恒力机构的结构示意图;
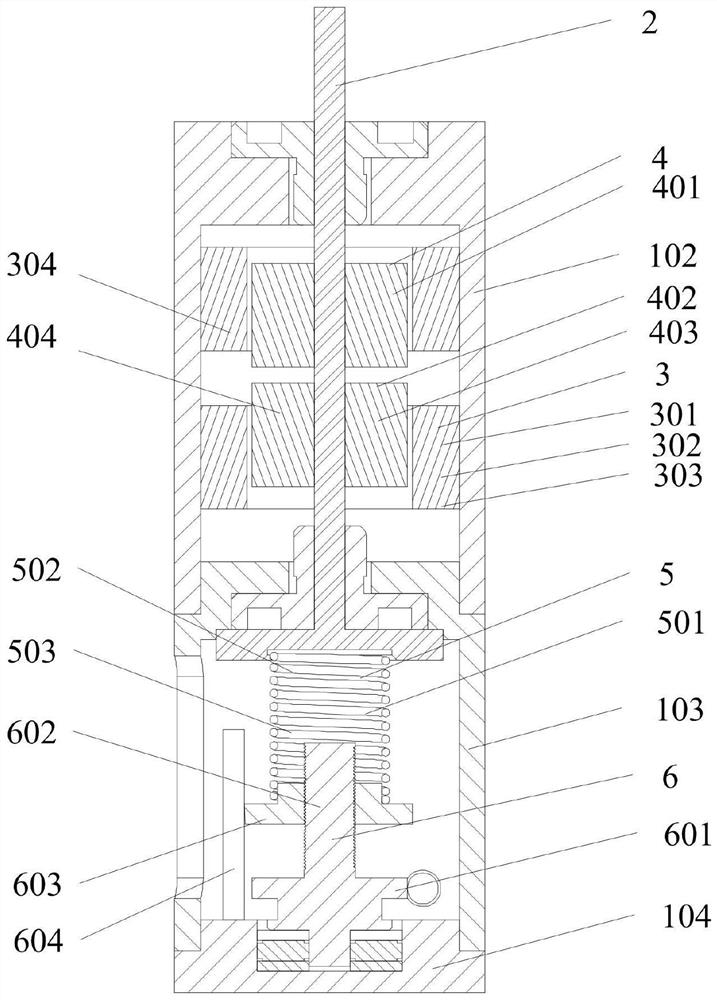
图2为本发明提供的可调恒力机构的剖视图;
图3为本发明提供的环形动子作用于输出轴的作用力、正刚度机构作用于 输出轴的作用力及环形动子和正刚度机构作用于输出轴的合力的力-位移曲线;
图4为实施例2提供的第一永磁体的磁场方向和第三线圈的电流方向的示 意图;
图5为实施例1中第一线圈和第二线圈的等效示意图;
图6为实施例1中第一载流环和第一载流环通入不同方向的电流时的受力 分析图;
图7为实施例1中第一载流环上的任一点P'和第二载流环上的任一点P 的几何关系示意图;
图8为实施例1中的第二线圈在第一线圈的磁场中作用于输出轴的作用力 的力-位移曲线;
图9为实施例2中第三线圈和第一永磁体的等效示意图;
图10为实施例2中第二环形永磁体在第一永磁体的磁场中的受力分析图;
图11为实施例2中第一环形永磁体在和第一永磁体的磁场中的受力分析 图;
图12为实施例2中的第一永磁体在第三线圈的磁场中作用于输出轴的作 用力的力-位移曲线;
图13为实施例3中的第三永磁体在第二永磁体的磁场中作用于输出轴的 作用力的力-位移曲线;
图14为实施例4中的第四线圈在第四永磁体的磁场中作用于输出轴的作 用力的力-位移曲线;
图中:100-可调恒力机构,1-外壳,101-安装孔,102-第一筒体,103-第 二筒体,104-基座,2-输出轴,3-环形定子,301-第一线圈,302-第三线圈, 303-第二永磁体,304-第四永磁体,4-环形动子,401-第二线圈,402-第一永磁 体,403-第三永磁体,404-第四线圈,5-正刚度机构,501-弹性部件,502-预 压缩量,503-弹簧,6调节机构,601-蜗轮蜗杆传动机构,602-连接轴,603- 连接块,604-导向轴,605-调节开关,7-第一载流环,8-第二载流环,9-中平 面,10-第一环形永磁体,11-第二环形永磁体,12-第三载流环。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清 楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造 性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种可调恒力机构,以解决现有技术存在的问题,结 构简单,对加工精度要求较低,便于加工,摩擦损耗小,避免了由于磨损而导 致精度降低,提高了使用寿命。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和 具体实施方式对本发明作进一步详细的说明。
实施例1
如图1-8所示,本实施例提供了一种,包括外壳1、输出轴2、环形定子3、 环形动子4和正刚度机构5,环形定子3套设在外壳1内并与外壳1固定连接, 环形动子4套设在环形定子3内并与环形定子3留有间隙,输出轴2与环形动 子4和正刚度机构5均固定连接,输出轴2设于外壳1内部并与外壳1转动连 接,输出轴2能够沿输出轴2的轴线方向移动,环形动子4在环形定子3的内 腔内的磁场的作用下能够为输出轴2提供第一作用力F
正刚度机构5为弹性部件501,弹性部件501优选为弹簧503,如图3所 示,正刚度机构5的刚度为定值,弹性部件501具有预压缩量502,正刚度机 构5作用于输出轴2上的力与输出轴2偏离平衡位移方向相反(如图3中的F
环形定子3为第一线圈301,环形动子4为第二线圈401,第一线圈301 和第二线圈401中的电流方向相反。如图5所示,根据安培电流模型,可以将 第一线圈301可以分解为多层均匀同轴第一载流环7,第一线圈301径向方向 的第一载流环7的层数为N
因此,第一线圈301和第二线圈401中的电流方向相反时,环形定子3 和环形动子4径向方向的对称面为中平面9,第一线圈301的中平面9两侧的 第二载流环8受到的安培力的轴向分力的方向相反,当第一线圈301的中平面 9和第二线圈401的中平面9重合时,第二线圈401中平面9两侧的第二载流 环8受到的安培力合力为0;当第二线圈401的中平面9偏离第一线圈301的 中平面9向上运动时,第一线圈301的中平面9上侧的第二载流环8的合力大 于第一线圈301的中平面9下侧的第二载流环8的合力,第二线圈401受到的 安培力方向向上;同理,当第二线圈401的中平面9偏离第一线圈301的中平 面9向下运动时,第二线圈401受到的安培力方向向下。环形定子3和环形动 子4组合形成了负刚度机构,与正刚度机构配合,使输出轴实现恒力输出。通 过调整环形定子3和/或环形动子4的电流的大小,能够改变负刚度机构的刚 度,可以使同一组环形定子3和环形动子4能够与多种正刚度机构5配合使用, 互换性好,有利于选型并节约成本;同时,通过调整环形动子4作用于输出轴 2的作用力,能够弥补正刚性机构5等的安装制造误差,精度高。
本发明采用矢量磁势的概念对第一线圈301和第二线圈401之间的相互作 用力进行推导,第一载流环7在第二载流环8上任意点p的磁矢量A为:
其中,μ
根据图7所述的几何关系,对公式(1)中的dl'和R
其中,φ为第二载流环8上任意一点p至第一载流环7圆心的连线与第二 载流环8上任意一点p’至第一载流环7圆心的连线的夹角,
第一载流环7的磁场强度为:
将公式(2)和公式(3)代入公式(4)中,得到:
B=a
其中,a
第一载流环7施加于第二载流环8上的电磁力F
其中,I
根据公式(3)~公式(8)计算得到:
其中,a
对公式(9)进行数值积分,将其中的φ'替换为
上式中,
根据叠加原理,第一线圈301施加于第二线圈401上的电磁力F为:
其中,r
将x取值并将计算的数值进行拟合,可以得到第二线圈401沿其轴线运动 时,在一定的运动范围内,第二线圈401受到的电磁力F呈线性。同时,环形 动子4和环形定子3的厚度能够影响此运动范围,改变环形动子4和环形定子 3的电流大小,能够改变第二线圈401在第一线圈301的磁场内受到的的电磁 力-位移曲线的斜率。如图8所示,b
环形定子3和环形动子4均为多个且数量相同,多个环形定子3均与外壳 1均固定连接且沿输出轴2的轴线方向布置,多个环形定子3中任意两个相邻 的环形定子3之间均留有等距离的间隙,各环形动子4套设在各环形定子3 内并与径向相对的环形定子3留有间隙,多个环形动子4均与输出轴2固定连 接且沿输出轴2的轴线方向布置,多个环形动子4中任意两个相邻的环形动子 4之间均留有等距离的间隙。可以使各环形动子4更好地实现线性输出。优选 的,如图4所示,环形定子3和环形动子4均为两个,两个环形定子3内的电 流方向相反,两个环形动子4的磁场方向相反。
本实施例提供的还包括调节机构6,调节机构6设于外壳1的内部,弹性 部件501的一端与输出轴2固定连接,调节机构6的输出端与弹性部件501 的另一端固定连接,调节机构6能够调节弹性部件501的预压缩量502,弹性 部件501的刚度与预压缩量502的乘积即为弹性部件501与第一永磁体401 作用于输出轴2的合力的大小,通过调整预压缩量502,能够调节输出轴2输 出的恒力的大小。
调节机构6包括蜗轮蜗杆传动机构601、连接轴602、连接块603和导向 轴604,连接块603优选为螺母,导向轴604的一端与外壳1固定连接,导向 轴604的另一端与连接块603滑动连接,导向轴604的轴线与连接轴602的轴 线相互平行,优选的,连接轴602的轴线与输出轴2的轴线共线,蜗轮蜗杆传 动机构601的蜗轮套设在连接轴602外并与连接轴602的一端固定连接,连接 轴602的另一端与连接块603螺纹连接,蜗轮蜗杆传动机构601的蜗杆的端部 伸出至外壳1外,连接轴602远离连接块603的端部与外壳1转动连接,连接 块603与正刚性机构固定连接。转动蜗轮蜗杆传动机构601的蜗杆的端部,由 螺杆带动蜗轮转动,蜗轮带动连接轴602转动,连接块603便可以沿导向轴 604上下移动,从而改变弹性部件501的预压缩量502。结构简单,便于调节。
调节机构6还包括调节开关605,外壳1设有安装孔101,蜗轮蜗杆传动 机构601的蜗杆的输入端穿过安装孔101与调节开关605固定连接。通过拧动 调节开关605,实现螺杆的正向或反向转动,从而改变弹性部件501的预压缩 量502。外壳1包括第一筒体102、第二筒体103和基座104,第一筒体102 的一端与第二筒体103的一端固定连接,第二筒体103的另一端与基座104 固定连接,输出轴2的一端转动连接于第一筒体102的一端,优选的,输出轴 2与第一筒体102远离第二筒体103的一端通过直线轴承转动连接,输出轴2 的另一端与第二筒体103靠近第一筒体102的一端转动连接,优选通过直线轴 承转动连接,输出轴2的上下两端均与外壳1转动连接,避免了输出轴2沿外 壳1轴线运动的过程中产生晃动,基座104与连接轴602远离连接块603的端 部转动连接,优选通过推力滚针轴承转动连接,环形定子3套设在第一筒体 102内并与第一筒体102固定连接,正刚度机构5设于第二筒体103内,优选 的,第一筒体102、第二筒体103和基座104之间均可拆卸连接,便于对环形 定子3、环形动子4、正刚度机构5和调节机构6等进行拆装和维修。
实施例2
如图1-12所示,本实施例中,环形定子3为第三线圈302,环形动子4 为第一永磁体402,第一永磁体402的充磁方向平行于输出轴2的轴线方向, 第三线圈302通入电流后中心的磁场方向与第一永磁体402的充磁方向相反。 如图9-11所示,第一永磁体402轴向充磁且方向向下,第三线圈302的电流 方向为逆时针(由上向下俯视第一线圈301),根据安培电流模型,将第一永 磁体402等效为半径为r
第三载流环12的等效电流I
其中,B
将实施例1中公式(14)中的r(n
将实施例1中公式(14)中的r(n
第一永磁体402在第三线圈302的磁场中受到的电磁力为F
其他部分与实施例1相同。
实施例3
如图1-13所示,本实施例中,环形定子3为第二永磁体303,环形动子4 为第三永磁体403,第二永磁体303和第三永磁体403的磁场方向均平行于输 出轴2的轴线方向,第二永磁体303和第三永磁体403的磁场方向相同。第三 永磁体403在第二永磁体303的磁场中受到的电磁力的分析方式与实施例2 相同。第三永磁体403偏离第二永磁体303的中平面9的一定范围内,第三永 磁体403在第二永磁体303的磁场中受到的电磁力与位移方向相同且呈线性。 如图13所示,b
其他部分与实施例1相同。
实施例4
如图1-14所示,本实施例中,环形定子3为第四永磁体304,环形动子4 为第四线圈404,第四永磁体304的充磁方向平行于输出轴2的轴线方向,第 四线圈404通入电流后中心的磁场方向与第四永磁体304的充磁方向相反。第 四线圈404在第四永磁体304的磁场中受到的电磁力的分析方式与实施例2 相同。第四线圈404偏离第四永磁体304的中平面9的一定范围内,第四线圈 404在第四永磁体304的磁场中受到的电磁力与位移方向相同且呈线性。如图 14所示,b
其他部分与实施例1相同。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实 施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域 的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改 变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种恒力回弹机构以及使用该恒力回弹机构的窗帘
- 一种曲面凸轮可调恒力输出机构