一种含分离式载车板的多层升降横移车库及其停车方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于智能泊车和立体车库技术领域,特别涉及一种含分离式载车板的多层升降横移车库及其停车方法。
背景技术
随着家庭车辆的普及度增加,城市车辆随之增多,但城市内停车位却增加有限,且城市土地越来越稀缺,导致停车日益紧张,随着人们生活水平提高,对占地面积小、自动化水平高的停车方式的方式逐渐增加。采用智能泊车机器人将车辆搬运到停车位,来替代人工寻找停车位,能够有效增加相同面积下的停车数量,且在停车取车高峰期也不会出现停车场内堵塞的状况,这种停车方式和智能泊车机器人受到很多人的期待和青睐。目前,泊车机器人包括抬板式、夹持式、夹举式、梳齿式等。其中,抬板式泊车机器人在抬起车辆的同时还需要抬起一个升降框,对车辆的损害最小,结构简单。虽然,采用智能泊车机器人能够在有限的空间内设计更多的停车位,但增加的停车位有限,因此,为了在停车场内设计更多的停车位,目前市场上已经出现了多种结构的立体停车库,在占用同样地面空间的停车场内可以将停车位的数量增加接近一倍的数量。
目前,市场上已经出现了多种结构的停车库,其中,升降横移立体车库最为常见。升降横移立体停车库可以应用于楼层空间较高的地下停车库,且结构简单,广泛应用于商场、医院、办公楼等地。以三车位的立体车库为例,通过升降横移能够实现三车位变五车位,实现在占地面积不变的情况下增加车位。但是,很多车辆驾驶员不会使用升降横移立体车库,需要专门的管理员来操作,浪费人力物力。更多时候,升降横移车库就没有被有效利用,浪费资源。同时,现有升降横移车库无法使用抬板机器人。
发明内容
鉴于现有技术中有上述技术问题,针对现有车库无法使用抬板机器人的问题,本发明提供一种含分离式载车板的多层升降横移车库及其停车方法。
本发明的技术方案如下所述:
本发明提供一种含分离式载车板的多层升降横移车库1,所述多层升降横移车库1,至少可以停放三层车辆,包括框架2、一层停车板3、中间层停放架4、顶层停放架5及可移动停车板6。所述顶层停放架5安装在框架2顶部,包括升降框7及其升降装置8。所述中间层停放架4包括横移装置9、升降框7及升降装置8,其中,升降装置8安装在横移装置9上,并与升降框7相连。所述升降装置8能够带动升降框7水平升高或降低。所述一层停车板3位于下层的停车位,其上设有四个支撑脚10和套在四个支撑脚10外面且与升降框形状相适应的凹槽11。所述升降框7的外圈比可移动停车板6大,但内圈比可移动停车板6小,能将移动停车板6托起,也能下降到凹槽11内。
进一步的,所述升降横移车库1包括一层一层停车板3、一层顶层停放架5、一层或数层中间层停放架4,其每层至少包括一个一层停车板3、顶层停放架5或中间层停放架4,且某一层的一排中间层停放架4的数量比一排一层停车板3的数量和一排顶层停放架5的数量均少一个。
进一步的,所述升降装置8包括电机、与电机相连接的绳轴、及绕在绳轴上与可移动停车板相连接的钢丝绳。同一可移动停车板的电机同步运行。当电机带动绳轴转动,钢丝绳随之放长或收短,从而实现可移动停车板的升高和降低。
进一步的,所述横移装置9包括横移框12、固定在横移框12上的数个电机、与电机相连接并与框架上横向导轨13相配合的滚轮14。同一中间层停放架的电机同步运行。当电机带动滚轮转动,滚轮沿着横向导轨横向移动,从而实现中间层停放架的横向移动。
在本发明中,所述多层升降横移车库包括两种可移动停车板的支撑方式,升降框和支撑脚,其上都可以放置一个载有车辆的可移动停车板。在升降框升高的过程中,因其支撑作用,能够将原来在支撑脚上的可移动停车板及车辆升高至预定的位置,而支撑脚上还可以停放另一个可移动停车板及车辆;在升降框降低的过程中,因其支撑作用,能够其上的可移动停车板及车辆降低至最低的位置,使可移动停车板及车辆停放在支撑脚上。
同时,一排中间层停放架的数量比一排一层停车板或顶层停放架的数量少一个,也就是说,在车库同一排的空间内,框架的每个中间层都有一个空白位。当抬板机器人需要将车辆停放到某一顶层停放架上或取出停放在某一顶层停放架上的车辆时,需要先通过横移装置调整中间层停放架的位置,使所有中间层的空白位于该顶层停放架相对应的位置,在通过顶层停放架的升降装置将对应的可移动停车板升高或降低,实现车辆在一层停车板与可移动停车板之间的交换,以便抬板机器人存车或取车。
本发明还提供上述含分离式载车板的多层升降横移车库的使用方法,所述方法包括如下内容:
存车时,优先将车辆停放在顶层停放架,其次为中间层停放架,最后为一层停车板;
其中,将车辆停放在顶层停放架,包括:通过横移装置调整所有中间层停放架的位置,使车库所有中间层的与该顶层停放架对应的位置处没有中间层停放架;通过升降装置调整该顶层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚;通过升降装置调整该顶层停放架的升降框的位置至最高位置;
其中,将车辆停放到中间层停放架,包括:
若该中间层停放架对应的一层停车板未停放车辆,则通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至最高位置;
若该中间层对应的一层停车板停放有车辆,但其旁边的一层停车板未停放有车辆,则通过横移装置调整该中间层停放架至未停放有车辆的一层停车板的上方;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至最高位置;
若该中间层对应的一层停车板及其旁边的一层停车板均停放有其他车辆,则通过抬板机器人将该可移动停车板及其他车辆从对应的支撑脚搬运到该车库或其他车库内其他未占用的支撑脚上、或者停车交换位上;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至最高位置;通过抬板机器人将上述可移动停车板及其他车辆从停车交换位搬运到未停放车辆的支撑脚上;
其中,将车辆停放到一层停车板,包括:抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;
取车时,包括如下五种情况:
其一,取出停放在一层停车板上的车辆,包括:抬板机器人将可移动停车板及车辆直接从支撑脚上搬运到停车交换位上;
其二,所有一层停车板上都停放有车辆时,取出中间层停放架上的车辆,包括:抬板机器人将对应的支撑脚上的可移动停车板及其他车辆搬运到其他车库内其他未占用的支撑脚上、或者停车交换位上;通过横移装置调整中间层停放架的位置,使车库其他中间层的与该中间层停放架对应的位置处没有中间层停放架;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将已经降低到对应的支撑脚上的可移动停车板及车辆搬运到停车交换位;抬板机器人将之前的可移动停车板及其他车辆从停车交换位搬运到对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至预定位置;
其三,至少有一个一层停车板未停放车辆时,取出中间层停放架上的车辆,包括:通过横移装置调整中间层停放架的位置,使其对应的是未停放车辆的一层停车板,且车库其他中间层的与该中间层停放架对应的位置处没有中间层停放架;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将已经降低到对应的支撑脚上的可移动停车板及车辆搬运到停车交换位上;
其四,取出顶层停放架上的车辆,且其对应的一层停车板未停放车辆,包括:通过横移装置调整所有中间层停放架的位置,使车库所有中间层的与该顶层停放架对应的位置处没有中间层停放架;通过升降装置调整该顶层停放架的升降框的位置至最低位置;抬板机器人将已经降低到对应的支撑脚上的可移动停车板及车辆搬运到停车交换位上;
其五,取出顶层停放架上的车辆,且其对应的一层停车板已停放车辆,包括:抬板机器人将对应的一层停车板上的可移动停车板及其他车辆搬运到该车库或其他车库内其他未占用的支撑脚上、或者停车交换位上;通过横移装置调整所有中间层停放架的位置,使车库所有中间层的与该顶层停放架对应的位置处没有中间层停放架;通过升降装置调整该顶层停放架的升降框的位置至最低位置;抬板机器人将已经被交换到对应的支撑脚上的车辆其载车台搬运到停车交换位上;抬板机器人将之前的可移动停车板及其他车辆从停车交换位搬运到以对应的支撑脚上;通过升降装置调整该顶层停放架的升降框的位置至预定位置。
以三层升降横移车库为例,常见的升降横移车库占用三个地面停车位,可停放七辆车的结构,顶层可停放三辆车,中间层和底层可停放两辆车,且顶层和中间层的载车板可升降,底层和中间层的载车板可横向移动。而本发明所述多层升降横移车库,同样选用三层结构、占用三个地面停车位时,可停放八辆车,顶层和底层都可以停放三辆车,中间层可停放两辆车,且顶层和中间层的升降框可升降,仅需要中间层可横移,底层不需要做横向移动。大约每一个占用三个地面停车位的三层升降横移车库,相对于传统三层升降横移车库,多了一个停车位。并且,本发明所述多层升降横移车库不仅适用于占用三个地面停车位的车库,还适占用任意数量停车位的车库。可见,本发明所述多层升降横移车库相对于传统升降横移车库的结构更简单,能够停放更多的车辆,大大提供了空间利用率。
传统升降横移车库,依靠人力操作,因无法启动车辆,不能将底层的车辆从车库中运出后,再将位于顶层或中间层的车辆取出,以及将原底层的车辆搬回车库,因此,需要在车库的框架底层留一个空位,以便所有中间层或顶的车辆都能够通过升降或横移后取出。而本发明中,采用泊车机器人来实现车辆的存放和取出,不需要启动车辆,能够通过泊车机器人将车辆搬运到其他位置。抬板机器人需要通过可移动停车板将车辆抬起,而可移动停车板可以停放在未占用额支撑脚上或停车交换位上。由于是泊车机器人自动执行,整个取车流程也不需要人工干预、花费时间不长、自动化运行,对于驾驶员来说不会觉得麻烦或浪费时间。
虽然,抬板机器人可以在取车时,将对取车有阻碍的多个其他车辆先搬运到在未占用额支撑脚上或停车交换位上,并将上述多个其他车辆重新搬运回车库。但是,为了避免降低空间利用率不宜设置较多临时停放位置,在搬运多个其他车辆时会花费较多的时间。这会使用户觉得取车所用时间较长,使用体验差。因此,车库的每个中间层都应当有一个空白位。这样,即使最难取出的车辆,也仅需要先取出一辆非待取车辆,就可以将待取车辆搬运到停车交换位。
本发明具有以下有益效果
1、相对于传统升降横移车库来说,本发明所述多层升降横移车库的结构更简单,仅需要中间层停放架和顶层停放架可以水平升降,中间层停放架可以横移,而不需要一层停车板可以横移;
2、采用泊车机器人存车和取车,全程自动运行,无需人工管理,也不受人工干扰,便于驾驶员操作,节省人力和时间成本;
3、本发明所述多层升降横移车库,相对于传统升降横移车库,在同样规格下,可以停放较多车辆。
附图说明
图1为本发明实施例中的一层停车板与可移动停车板开始交换车辆时的示意图;
图2为本发明实施例中的一层停车板与可移动停车板交换车辆后的示意图;
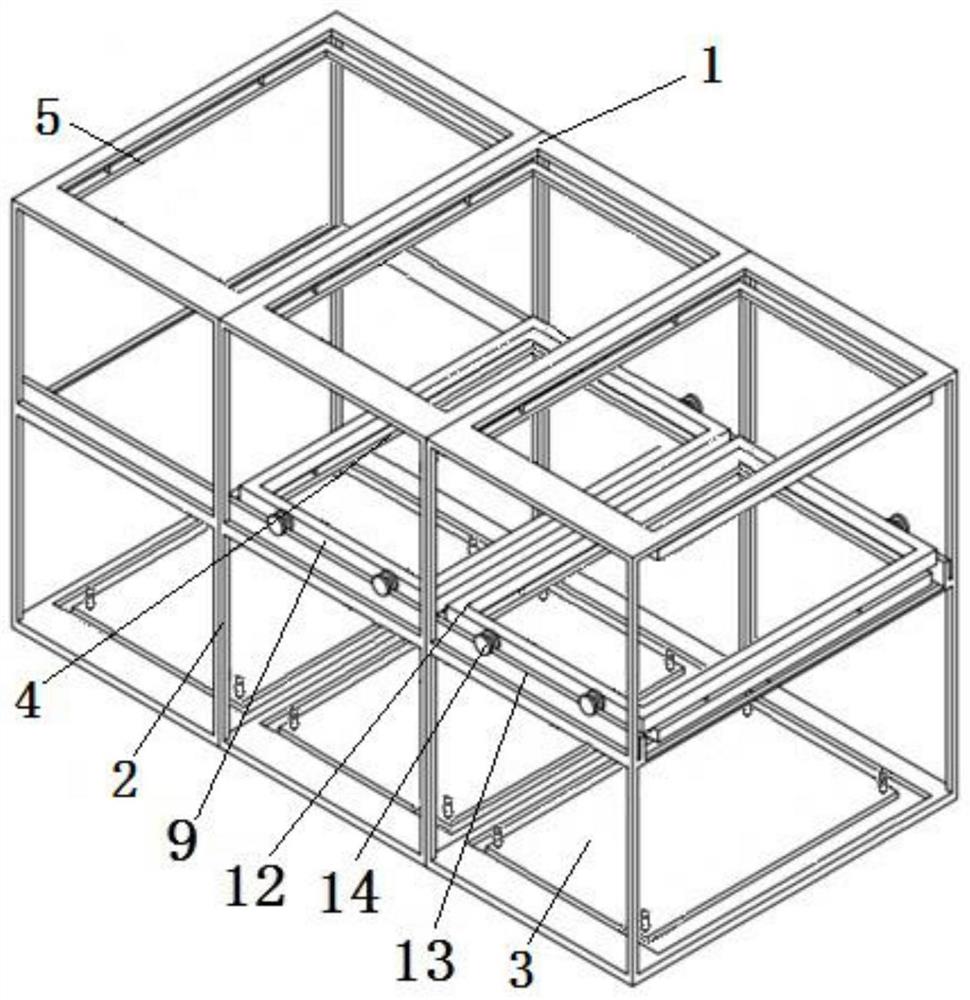
图3为本发明实施例中的多层升降横移车库无车示意图;
其中,1为多层升降横移车库,2为框架,3为一层停车板,4为中间层停放架,5为顶层停放架,6为可移动停车板,7为升降框,8为升降装置,9为横移装置,10为支撑脚,11为凹槽,12为横移框,13为横向导轨,14为滚轮。
具体实施方式
为了更清楚地说明本发明的技术方案,下面结合具体实施例和附图进行说明,显而易见地,下面描述中的实施例仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些实施例获得其他的实例。
实施例1
本实施例涉及一种含分离式载车板的多层升降横移车库1,如图1-3所示,所述多层升降横移车库1,包括框架2、一层停车板3、中间层停放架4、顶层停放架5及可移动停车板6,可以停放三层车辆,即一层一层停车板3、一层顶层停放架5、一层中间层停放架4。所述顶层停放架5安装在框架2顶部,包括升降框7及其升降装置8。所述中间层停放架4包括横移装置9、升降框7及升降装置8,其中,升降装置8安装在横移装置9上,并与升降框7相连。所述升降装置8能够带动升降框7水平升高或降低。所述一层停车板3位于下层的停车位,其上设有四个支撑脚10和套在四个支撑脚10外面且与升降框形状相适应的凹槽11。所述升降框7的外圈比可移动停车板6大,但内圈比可移动停车板6小,能将移动停车板6托起,也能下降到凹槽11内。
所述升降装置8包括电机、与电机相连接的绳轴、及绕在绳轴上与可移动停车板相连接的钢丝绳。同一可移动停车板的电机同步运行。当电机带动绳轴转动,钢丝绳随之放长或收短,从而实现可移动停车板的升高和降低。
所述横移装置9包括横移框12、固定在横移框12上的数个电机、与电机相连接并与框架上横向导轨13相配合的滚轮14。同一中间层停放架的电机同步运行。当电机带动滚轮转动,滚轮沿着横向导轨横向移动,从而实现中间层停放架的横向移动。
本实施例中的含分离式载车板的多层升降横移车库的使用方法,所述方法包括如下内容:
存车时,优先将车辆停放在顶层停放架,其次为中间层停放架,最后为一层停车板;
其中,将车辆停放在顶层停放架,包括:通过横移装置调整所有中间层停放架的位置,使车库所有中间层的与该顶层停放架对应的位置处没有中间层停放架;通过升降装置调整该顶层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚;通过升降装置调整该顶层停放架的升降框的位置至最高位置;
其中,将车辆停放到中间层停放架,包括:
若该中间层停放架对应的一层停车板未停放车辆,则通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至最高位置;
若该中间层对应的一层停车板停放有车辆,但其旁边的一层停车板未停放有车辆,则通过横移装置调整该中间层停放架至未停放有车辆的一层停车板的上方;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至最高位置;
若该中间层对应的一层停车板及其旁边的一层停车板均停放有其他车辆,则通过抬板机器人将该可移动停车板及其他车辆从对应的支撑脚搬运到该车库或其他车库内其他未占用的支撑脚上、或者停车交换位上;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至最高位置;通过抬板机器人将上述可移动停车板及其他车辆从停车交换位搬运到未停放车辆的支撑脚上;
其中,将车辆停放到一层停车板,包括:抬板机器人将可移动停车板及车辆停放在对应的支撑脚上;
取车时,包括如下五种情况:
其一,取出停放在一层停车板上的车辆,包括:抬板机器人将可移动停车板及车辆直接从支撑脚上搬运到停车交换位上;
其二,所有一层停车板上都停放有车辆时,取出中间层停放架上的车辆,包括:抬板机器人将对应的支撑脚上的可移动停车板及其他车辆搬运到其他车库内其他未占用的支撑脚上、或者停车交换位上;通过横移装置调整中间层停放架的位置,使车库其他中间层的与该中间层停放架对应的位置处没有中间层停放架;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将已经降低到对应的支撑脚上的可移动停车板及车辆搬运到停车交换位;抬板机器人将之前的可移动停车板及其他车辆从停车交换位搬运到对应的支撑脚上;通过升降装置调整该中间层停放架的升降框的位置至预定位置;
其三,至少有一个一层停车板未停放车辆时,取出中间层停放架上的车辆,包括:通过横移装置调整中间层停放架的位置,使其对应的是未停放车辆的一层停车板,且车库其他中间层的与该中间层停放架对应的位置处没有中间层停放架;通过升降装置调整该中间层停放架的升降框的位置至最低位置;抬板机器人将已经降低到对应的支撑脚上的可移动停车板及车辆搬运到停车交换位上;
其四,取出顶层停放架上的车辆,且其对应的一层停车板未停放车辆,包括:通过横移装置调整所有中间层停放架的位置,使车库所有中间层的与该顶层停放架对应的位置处没有中间层停放架;通过升降装置调整该顶层停放架的升降框的位置至最低位置;抬板机器人将已经降低到对应的支撑脚上的可移动停车板及车辆搬运到停车交换位上;
其五,取出顶层停放架上的车辆,且其对应的一层停车板已停放车辆,包括:抬板机器人将对应的一层停车板上的可移动停车板及其他车辆搬运到该车库或其他车库内其他未占用的支撑脚上、或者停车交换位上;通过横移装置调整所有中间层停放架的位置,使车库所有中间层的与该顶层停放架对应的位置处没有中间层停放架;通过升降装置调整该顶层停放架的升降框的位置至最低位置;抬板机器人将已经被交换到对应的支撑脚上的车辆其载车台搬运到停车交换位上;抬板机器人将之前的可移动停车板及其他车辆从停车交换位搬运到以对应的支撑脚上;通过升降装置调整该顶层停放架的升降框的位置至预定位置。
上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所做的任何等效变化或修饰,均应落入本发明的保护范围之内。本发明未涉及部分与现有技术相同或可采用现有技术加以实现。
- 一种含分离式载车板的多层升降横移车库及其停车方法
- 一种载车板改进型后悬臂式两层升降横移立体停车库