智能屋顶除雪机
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及积雪清扫技术领域,特别是涉及一种智能屋顶除雪机。
背景技术
在我国北方的冬天,屋顶经常由于降雪而导致大量的积雪,如果积雪堆积在房屋顶部不及时清扫,有些结构强度差的屋顶可能会被积雪压塌,对生命和财产的安全造成危害,尤其是对于一些经济实惠、方便快捷的钢结构厂房或者一些斜屋顶。而采用人工清雪清扫效率低、劳动量大并且危险系数高,但若不能及时清除积雪,又存在安全隐患。
发明内容
本发明的目的在于解决现存的针对屋顶清雪麻烦、浪费人力、效率低、危险系数高的技术问题,提供一种智能屋顶除雪机,不仅可以有效提高除雪效率、及时清除积雪,而且大大降低清除积雪过程中的危险系数。
为实现上述目的,本发明采取如下的技术方案:
一种智能屋顶除雪机,包括除雪机构、行走机构、抬起机构、超声波传感器、摄像装置、电池装置和控制系统,所述控制系统分别与所述超声波传感器、所述摄像装置、所述除雪机构、所述行走机构、所述抬起机构连接,所述电池装置分别为所述除雪机构、所述行走机构、所述抬起机构、所述超声波传感器、所述摄像装置和所述控制系统供电;
所述除雪机构在所述行走机构的前方,且所述除雪机构与所述行走机构通过支撑轴铰接;
所述抬起机构的一端与所述行走机构的顶部连接,另一端与所述除雪机构的顶部连接;
在所述除雪机构的两侧分别设置所述超声波传感器,所述摄像装置安装于所述除雪机构的上方,所述电池装置安装在所述行走机构上;
所述控制系统根据所述超声波传感器采集的传感数据和所述摄像装置拍摄的图像数据进行除雪路线规划,并根据规划好的除雪路线控制所述除雪机构、所述行走机构以及所述抬起机构运动。
本发明的有益技术效果:本发明采用分离组装式结构,整体分成除雪机构和行走机构两大部分,在使用时可以将除雪机构和行走机构分别放置在屋顶上之后再将二者进行组装,搬运方便,并且本发明的智能屋顶除雪机通过超声波传感器和摄像装置相配合,可以对路线进行智能化、自动化的规划,实现无人智能清雪,既提高屋顶除雪效率,同时又降低人工屋顶除雪的成本和危险系数。
附图说明
图1为本发明智能屋顶除雪机的整体结构示意图;
图2位本发明智能屋顶除雪机中除雪机构的结构示意图;
图3为本发明智能屋顶除雪机中行走机构的局部剖视图;
图标记说明:1、辊刷,2、轴套,3、大同步带轮,4、辊刷轴,5、辊刷侧板,6、万向轮,7、叶轮,8、叶轮顶套Ⅰ,9、叶轮轴,10、齿轮轴,11、大圆柱齿轮,12、小圆柱齿轮,13、第一联轴器,14、叶轮轴端盖,15、叶轮侧板,16、后板,17、抛雪头,18、抛雪桶,19、抛雪座,20、叶轮顶套Ⅱ,21、蜗壳,22、底板,23、支撑轴,24、支座,25、特殊轴承座,26、轴承座,27、前传动轴,28、锥齿轮Ⅰ,29、锥齿轮Ⅱ,30、中传动轴,31、中传动轴轴承座,32、第二联轴器,33、从动轴,34、履带,35、电机支座,36、从动轮,37、主动轮,38、小同步带轮,39、第一直流电机,40、支架,41、第二直流电机,42、电池装置,43、电池上板,44、推杆调节架,45、推杆支座,46、电动推杆,47、上板,48、下板,49、支撑侧板。
具体实施方式
下面将结合附图及较佳实施例对本发明的技术方案进行详细描述。
本发明提供一种智能屋顶除雪机,参见图1,包括除雪机构、行走机构、抬起机构、超声波传感器、摄像装置、控制系统和电池装置42,其中控制系统分别与超声波传感器、摄像装置、除雪机构、行走机构、抬起机构连接,用于接收超声波传感器采集的传感数据和摄像装置拍摄的图像数据以及通过PLC编程控制除雪机构、行走机构、抬起机构中各个直流电机、电动推杆、超声波传感器、摄像装置的工作状态。电池装置42分别为除雪机构、行走机构、抬起机构、超声波传感器、摄像装置和控制系统供电。可选地,本发明中的电池装置42为蓄电池。
除雪机构在行走机构的前方,并且除雪机构与行走机构通过支撑轴23铰接,一方面保证除雪机构与行走机构之间是可拆卸的,方便向屋顶上搬运,另一方面保证除雪机构能够相对行走机构转动,从而在遇到障碍物时,在抬起机构的作用下,将除雪机构抬起一定的角度。
抬起机构的一端与行走机构的顶部连接,另一端与除雪机构的顶部连接。由于除雪机构与行走机构之间是通过支撑轴23铰接的,因此当抬起机构伸长或者收缩时,除雪机构将在抬起机构的带动下绕支撑轴23转动,从而脱离屋顶表面,有利于跨越屋顶的障碍物。
在除雪机构的两侧分别设置超声波传感器,超声波传感器能够探知屋顶上的障碍物以及悬空情况;摄像装置安装于除雪机构的上方,用于实时拍摄除雪机构前方的屋顶地形;电池装置42安装在行走机构上。
控制系统根据超声波传感器采集的传感数据和摄像装置拍摄的图像数据进行除雪路线规划,并根据规划好的除雪路线控制除雪机构、行走机构以及抬起机构运动,在清雪的同时,如遇障碍物或者悬空,控制系统会及时更改规划路线,并控制除雪机构、行走机构以及抬起机构按照更改后的规划路线运动。
参见图1和图2,除雪机构包括扫雪机构、抛雪机构、抛雪导向机构、除雪传动机构、上板47、下板48和万向轮6(图2中未示出上板47)。行走机构带动除雪机整体缓慢前进,扫雪机构将屋顶的积雪打散传送到抛雪机构,抛雪机构将积雪抛出,在除雪机构行进过程中如遇障碍或者悬空,抬起机构将除雪机构抬起一个角度再通过装置下方的万向轮6实现障碍跨越,完成自动除雪工作。
具体地,扫雪机构包括辊刷1、辊刷轴4、轴套2和辊刷侧板5;辊刷1与辊刷轴4之间螺纹连接固定,在辊刷1的两侧分别装上轴套2,使辊刷1的轴向限位,在辊刷轴4两侧的辊刷侧板5分别与两侧的支撑侧板49连接,辊刷轴端盖与辊刷侧板5螺纹连接。
抛雪机构包括叶轮7、叶轮轴9、叶轮顶套Ⅰ8、叶轮顶套Ⅱ20、叶轮轴端盖14、叶轮侧板15和蜗壳21;叶轮7与叶轮轴9之间通过键连接,叶轮7的两侧分别安装叶轮顶套Ⅰ8、叶轮顶套Ⅱ20,使叶轮7的轴向限位,在叶轮轴9两侧的叶轮侧板15分别与两侧的支撑侧板49连接,叶轮侧板15还与后板16连接,叶轮轴端盖14与叶轮侧板15螺纹连接,蜗壳21包覆在叶轮7外侧并与上板47连接。
抛雪导向机构包括抛雪头17、抛雪桶18和抛雪座19;抛雪座19与上板47连接,抛雪桶18与抛雪座19上分别对应设有U形槽,U形槽之间通过螺栓连接,既能实现抛雪桶18与抛雪座19之间的紧固又能实现抛雪桶18的方向的调节,抛雪头17安装在抛雪桶18的顶部。
除雪传动机构包括第一直流电机39、小圆柱齿轮12、大圆柱齿轮11、齿轮轴10、小同步带轮38和大同步带轮3;第一直流电机39与两个L型角铁、一个电机架分别螺纹连接,两个L型角铁的一端与后板16连接,另一端在第一直流电机39的下方,电机架的一端与第一直流电机39端部的螺纹孔连接,电机架的另一端与后板16螺纹连接,电机输出轴通过第一联轴器13与齿轮轴10一端连接,大圆柱齿轮11与齿轮轴10的另一端通过顶丝连接固定,小圆柱齿轮12与叶轮轴9通过顶丝连接固定,小同步带轮38与叶轮轴9通过顶丝连接固定,大同步带轮3与辊刷轴4通过顶丝连接固定,同步带包裹在小同步带轮38和大同步带轮3上。
两个万向轮6分别装在除雪机构两侧的支撑侧板49上,实现除雪机构的转向功能。可选地,每一个万向轮6通过L型支架与对应的支撑侧板49螺栓连接。
在除雪机构中,辊刷侧板5、支撑侧板49、叶轮侧板15和后板16相互螺纹连接配合在辊刷轴4和叶轮轴9的四周,辊刷侧板5、支撑侧板49、叶轮侧板15和后板16位于上板47和下板48之间并且分别与上板47和下板48连接。
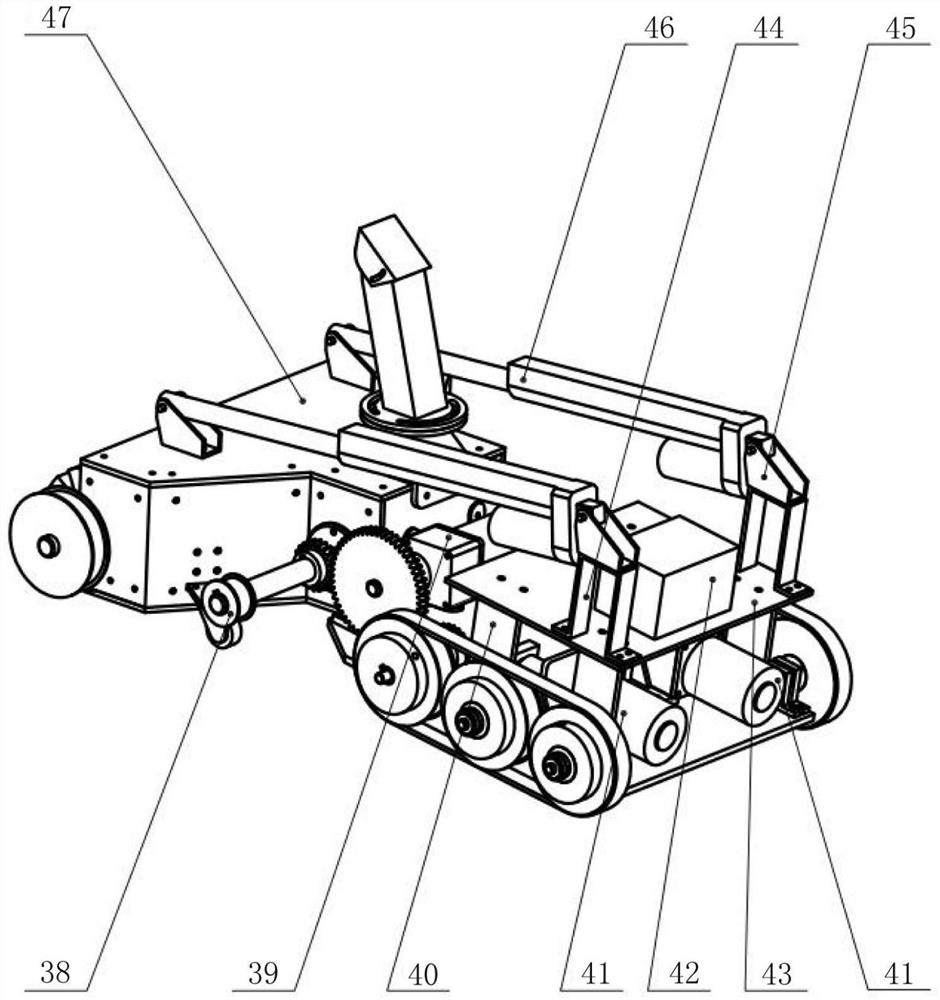
参见图3,行走机构包括行走传动机构、行路机构、抬起机构和底板22。
具体地,行走传动机构包括两个位于底板22上的子传动机构,两个子传动机构的结构相同,每一个子传动机构包括第二直流电机41、前传动轴27、中传动轴30、圆锥齿轮Ⅰ28、圆锥齿轮Ⅱ29、轴承座26、特殊轴承座25和中传动轴轴承座31;第二直流电机41位于底板22上面,并与电机支座35螺纹连接,电机支座35与底板22螺纹连接,第二直流电机41的电机输出轴通过第二联轴器32与中传动轴30的一端连接,中传动轴轴承座31位于中传动轴30的中间部位并与底板22螺纹连接,圆锥齿轮Ⅱ29位于中传动轴30的另一端,前传动轴27通过轴承座26和特殊轴承座25固定在底板22前端,圆锥齿轮Ⅰ28位于前传动轴27的一端并与圆锥齿轮Ⅱ29啮合传动。
行路机构包括主动轮37、履带34、两个从动轴33和两个从动轮36;主动轮37与前传动轴27的另一端螺栓固定连接,并且主动轮37与圆锥齿轮Ⅰ28同轴,两个从动轴33的一端分别通过轴承座与底板22连接,两个从动轴33的另一端与对应的从动轮36配合,履带34包裹在主动轮37和两个从动轮36上。
支撑轴23通过四个支座24连接在底板22前端,支撑轴23通过轴承与上述除雪机构中的叶轮侧板15配合,使整体形成铰链连接。
抬起机构包括两个电动推杆46、两个推杆调节架44和四个推杆支座45;两个推杆调节架44与电池上板43连接,电池上板43通过四个支架40与底板22固定连接,每一个电动推杆46的一端通过一个推杆支座45与推杆调节架44连接,另一端通过另一个推杆支座45与上述除雪机构中的上板47连接,使电动推杆整体形成一定角度,方便力的传导。
本发明中的控制系统用于控制各个直流电机、电动推杆、超声波传感器、摄像装置的工作状态,同时,控制系统还用于与WiFi图传系统、识别系统相配合,实现实时无线图传以及障碍物躲避的功能。
本发明的智能屋顶除雪机还包括与所述控制系统连接的WiFi图传系统,WiFi图传系统将摄像装置拍摄的图像数据无线传输至移动终端(例如智能手机、平板电脑等),移动终端对图像数据进行实时显示,供操作人员查看。
本发明的智能屋顶除雪机还包括与控制系统连接的识别系统,识别系统用于识别障碍物,并将识别结果发送至控制系统,控制系统根据识别结果控制抬起机构运动。
本发明的智能屋顶除雪机实现了自动规划路径的无人清雪过程,具有高效、省力、危险系数低的优点,其工作原理如下:本发明采用三电机设计,保证除雪机构和行走机构同时工作。行走机构采用双电机设计,通过圆锥齿轮、传动带动行路机构,可以利用两个电机差速、一个停滞另一个转动等一系列调节进行转向工作,使除雪机的转向更加方便灵活;除雪机构中辊刷和叶轮采用一个直流电机通过除雪传动机构使其实现先增速后减速,令两轴转速不同,在保证确定的传动比情况下:通过齿轮传动将电机动力传递给叶轮轴,此为增速,再利用同步带传动,将动力传递给辊刷,此为减速;工作时,小车缓慢前进,一部分雪被辊刷直接输送到叶轮内部,借助叶轮的高速旋转时的离心力直接离心抛出,另一部分雪在被辊刷打散进入侧板和上板、下板形成的空腔内,由于叶轮高速旋转并且与蜗壳配合会形成压差,产生吸力,因此空腔内的雪也会被吸入叶轮内,再利用叶轮高速旋转时的离心力离心抛出,从而同时达到清雪和抛雪的目的,也可随意调节前进速率,防止空腔内积雪过多导致卡顿或者清雪效率过低;在除雪机构上装有摄像装置和超声波传感器以判断屋顶地形以及悬空情况,并做出路线规划,在清雪的同时如遇悬空会及时更改规划路线;同时摄像装置会实时传输画面以供操作员检查工作,并且在遇到障碍时可以利用电动推杆将除雪机构抬起,再利用除雪机构下方的万向轮和行走机构的履带实现跨越障碍。
综上所述,本发明采用分离组装式结构,整体分成除雪机构和行走机构两大部分,在使用时可以将除雪机构和行走机构分别放置在屋顶上之后再将二者进行组装,搬运方便,并且本发明的智能屋顶除雪机通过超声波传感器和摄像装置相配合,可以对路线进行智能化、自动化的规划,实现无人智能清雪,既提高屋顶除雪效率,同时又降低人工屋顶除雪的成本和危险系数。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 智能屋顶除雪机
- 坡屋顶除雪机器人