发动机启动工况模式切换的动态转矩协调控制系统和方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及混合动力汽车技术领域,具体而言,涉及一种发动机启动工况模式切换的动态转矩协调控制系统和方法。
背景技术
插电式混合动力汽车(Power split plug-in hybrid electric vehicle,PS-PHEV)是一种新能源车辆,与传统内燃机汽车相比,PS-PHEV通过选择不同的工作模式具有更好的系统效率、燃油经济性和排放性能。但是,由于PS-PHEV比传统的燃料汽车具有更多的工作模式,在发动机启动模式切换的过程中,车辆动力传动系统通常会产生明显的冲击和振动,对于动力分配式混合动力汽车,发动机脉动转矩将直接传递到动力总成系统,在模式转换过程中,传递的发动机脉动转矩将对动力传输系统造成明显的冲击和振动,尤其是在发动机启动过程中,所产生瞬变会使驾驶不舒适,并降低动力传动系统的使用寿命。
在现有技术中,发动机启动过程主动阻尼补偿控制方法(ADCC)是常用的控制方法,如图1所示,该ADCC方法主要是通过电机转矩分配算法和主动阻尼反馈补偿转矩分配算法来实现快速、平顺地启动发动机的。
为进一步分析ADCC方法在不同发动机启动工况点下是否能够有效地减少模式切换过程中动力系统的冲击和振动,建立复合PS-PHEV动态模型,如图2所示,以图2中6个典型的发动机启动工况点(A、B、C、D、E、F)为例,在复合PS-PHEV动态模型上进行仿真分析,各发动机启动工况点的情况分别为:
发动机启动工况点A:在EV模式下,整车以加速踏板开度APP为30%加速行驶,在电池温度40℃、电池SOC0.2和齿圈需求转矩51.7Nm条件下,当车速加速到30km/h时,混合动力系统从EV模式开始切换到ECVT模式的临界点;
发动机启动工况点B:在EV模式下,整车以加速踏板开度APP为50%加速行驶,在电池温度40℃、车速等于20km/h和齿圈需求转矩51.7Nm条件下,当电池SOC降到0.15时,混合动力系统从EV模式开始切换到ECVT模式的临界点;
发动机启动工况点C:在EV模式下,整车以加速踏板开度APP为50%进行加速行驶,在电池温度40℃和齿圈需求转矩90.5Nm条件下,当电池SOC降到0.2且车速为70km/h时,混合动力系统从EV模式开始切换到ECVT模式的临界点;
发动机启动工况点D:在EV模式下,整车以加速踏板开度APP为95%进行高负荷行驶,在电池温度40℃、电池SOC0.8和车速等于20km/h条件下,当齿圈需求转矩为460Nm时,混合动力系统从EV模式开始切换到ECVT模式的临界点;
发动机启动工况点E:在EV模式下,整车以加速踏板开度APP为95%进行加速且较高负荷行驶,在电池温度为40℃、电池SOC为0.8和车速等于50km/h条件下,当齿圈需求转矩达到202.8Nm时,混合动力系统从EV模式开始切换到ECVT模式的临界点;
发动机启动工况点F:在EV模式下,整车以加速踏板开度APP为95%进行高速低负荷行驶,在电池温度为40℃、电池SOC为0.8和齿圈需求转矩为108.1Nm条件下,当车速加速到90km/h(电机MG1最大转速受限而启动发动机)时,混合动力系统从EV模式开始切换到ECVT模式的临界点。
如图3可知,ADCC方法在6个发动机启动工况点下的冲击度绝对值的最大值,在发动机启动工况点A和B下,该控制方法能够有效地将系统的冲击度减少在10m/s
发明内容
本说明书提供一种发动机启动工况模式切换的动态转矩协调控制系统和方法,用以克服现有技术中存在的至少一个技术问题。
根据本说明书实施例,提供了一种发动机启动工况模式切换的动态转矩协调控制系统,包括发动机分段主动控制模块、启动前馈和反馈控制模块、主动阻尼反馈补偿控制模块;
所述发动机分段主动控制模块,用于通过控制点火前电启动发电机阶段进气阀关闭时刻、发动机启动初始曲轴角的输入以及点火后初始燃烧阶段发动机燃油喷射、发动机点火时刻的输入,调控发动机的输出转矩;
所述启动前馈和反馈控制模块,用于通过控制点火前发动机启动工况下的发动机所需角加速度以及点火后发动机达到最佳目标转速所需的角加速度,进而调控两电机的分配转矩;
所述主动阻尼反馈补偿控制模块,用于根据修正的反馈阻尼转矩和采用极点配置法确定的反馈增益阻尼系数对电机的主动阻尼反馈补偿控制转矩进行修正;其中,所述修正的反馈阻尼转矩根据采用遗传算法所获取的基于发动机启动工况下最优增益系数计算得出。
优选的,所述发动机分段主动控制模块包括点火前电启动发动机阶段控制模块和点火后初始燃烧阶段控制模块;
所述点火前电启动发动机阶段控制模块,用于控制点火前电启动发电机阶段进气阀关闭时刻、发动机启动初始曲轴角的输入,调控发动机的输出转矩,以减小发动机启动过程中自身的脉动转矩;
所述点火后初始燃烧阶段控制模块,用于控制点火后初始燃烧阶段发动机燃油喷射、发动机点火时刻的输入,调控发动机的输出转矩,以减少发动机初始燃烧过程中传动系统的冲击和振动。
优选的,所述启动前馈和反馈控制模块包括前馈控制所需角加速度获取模块、反馈控制所需角加速度获取模块、切换开关模块以及电机转矩分配模块;
所述前馈控制所需角加速度获取模块,用于将遗传算法优化的“S曲线”函数作为点火前电启动发动机阶段前馈控制所需的发动机角加速度;其中,所述“S曲线”函数为:
式中,a、b和c为发动机角加速度
所述反馈控制所需角加速度获取模块,用于根据估计的发动机输出轴转速与最优发动机转速的差值,获取点火后发动机燃烧阶段反馈控制所需的发动机角加速度;
所述切换开关模块,用于根据发动机点火喷油转速指令输出发动机需求角加速度;所述发动机需求角加速度包括所述前馈控制所需的发动机角加速度、反馈控制所需的发动机角加速度;
所述电机转矩分配模块,用于基于发动机需求角加速度计算两电机分配转矩。
进一步优选的,所述计算两电机分配转矩的分配算法为:
式中,T
进一步优选的,所述反馈控制所需角加速度获取模块包括PID控制器;所述PID控制器输入所述估计的发动机输出轴转速与发动机最优转速之间的差值,输出所述反馈控制所需的发动机角加速度。
根据本说明书实施例,还提供了一种发动机启动工况模式切换的动态转矩协调控制方法,所述动态转矩协调控制方法包括以下控制过程:
发动机分段主动控制:在点火前电启动发动机阶段,控制进气阀关闭时刻以及发动机启动初始曲轴角的输入,进而控制发动机的输出转矩,减小发动机启动过程中自身的脉动转矩;在点火后发动机初始燃烧阶段,控制发动机燃油喷射以及发动机点火时刻的输入,进而改变发动机的输出转矩,减少发动机初始燃烧过程中传动系统的冲击和振动;
发动机启动的前馈和反馈控制:在点火前电启动发动机阶段,将基于遗传算法优化的“S曲线”函数作为前馈控制所需的发动机角加速度
式中,a、b和c为
基于发动机启动工况的主动阻尼反馈补偿控制:采用遗传算法对驱动轴转矩观测器的最优增益系数L进行求解,利用所获得的最优增益系数L计算驱动轴估计转矩,根据所述驱动轴估计转矩获取反馈阻尼转矩,并采用极点配置法确定所述主动阻尼反馈补偿控制中的反馈增益阻尼系数,根据所述反馈阻尼转矩、反馈增益阻尼系数对电机的主动阻尼反馈补偿控制转矩进行修正。
优选的,所述进气阀关闭时刻为150deg,所述发动机启动初始曲轴角为165度。
优选的,采用遗传算法优化所述发动机燃油喷射以及发动机点火时刻。
进一步优选的,所述采用遗传算法优化所述发动机燃油喷射以及发动机点火时刻具体包括:
建立复合插电式混合动力汽车PS-PHEV仿真模型;
基于所述复合PS-PHEV仿真模型,发动机系统接收点火命令后,进入第j个工作循环,并确定发动机冷却水温度;其中,j=3,4,5;
在发动机缸内燃烧失火约束条件下,遗传算法自动初始化燃油喷射系数和点火时刻,以得到不同燃油喷射量和点火时刻下的缸内压力,并计算得出发动机总脉动转矩;
根据所述发动机总脉动转矩和复合PS-PHEV仿真模型,计算适应度函数,根据适应度值选取最优的燃油喷射量和点火时刻;
当满足遗传算法迭代的终止条件,退出循环,输出最优的燃油喷射量和点火时刻。
优选的,所述采用遗传算法对驱动轴转矩观测器的最优增益系数L进行求解具体包括:
加载初始化条件(G,I),确定角加速度最大误差矩阵;其中,所述角加速度最大误差矩阵H定义为:
式中,γ为齿圈转矩估计的最大误差系数,T
其中,
T
T
I
I
式中,β
根据期望收敛时间确定误差衰减系数K
建立LMIs结构,得到合适的约束条件;所述LMIs结构表示为:
式中,L(V
采用遗传算法获得K
本说明书实施例的有益效果如下:
采用发动机分段主动控制、发动机启动的前馈和反馈控制和基于发动机启动工况的主动阻尼反馈补偿控制相结合的动态转矩协调控制系统及其方法,尽可能地减小了不同发动机启动工况下模式切换过程中系统的冲击和振动,改善了不同发动机启动工况下的整车驾驶舒适性。
在发动机分段主动控制过程中,从发动机动力源主要控制出发减小发动机启动过程中自身脉动转矩对系统冲击和振动的影响。其主要包括:在点火前电启动发动机阶段,通过进气阀关闭时刻以及发动机启动初始曲轴角调控发动机的输出转矩,减小发动机启动过程中自身的脉动转矩;在点火后发动机初始燃烧阶段,基于发动机启动工作循环,采用遗传算法优化的发动机燃油喷射以及发动机点火时刻控制发动机的输出转矩,减少发动机初始燃烧过程中传动系统的冲击和振动。
在发动机启动的前馈和反馈控制过程中,通过点火前后不同的发动机需求角加速度对电机转矩分配算法进行求解实现,以减小整车冲击度。其主要包括:在点火前电启动发动机阶段,基于遗传算法优化的“S曲线”函数作为前馈控制所需的发动机角加速度;在点火后发动机燃烧阶段,反馈控制所需的发动机角加速度通过PID控制器获得,PID控制器输入估计的发动机输出轴转速与最优发动机转速的差值,根据该差值输出相对应的发动机角加速度。
在基于发动机启动工况的主动阻尼反馈补偿控制过程中,采用遗传算法获得基于发动机启动工况下的最优控制增益系数矩阵,提高了主动阻尼反馈补偿控制的准确性,并在根轨迹的零极点分布图上采用极点配置法对阻尼反馈控制中的反馈增益阻尼系数进行优化,减小了传动系统的共振峰值并改善了驾驶舒适性。利用优化后的最优增益系数和反馈增益阻尼系数对电机的主动阻尼反馈补偿控制转矩进行修正,减少了传递到车轮处的转矩波动,并抑制了传动系统的振荡。
附图说明
为了更清楚地说明本说明书实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为现有技术中ADCC方法的结构框图;
图2为现有技术中EV模式下发动机启动工况点的示意图;
图3为图2中不同发动机启动工况点的冲击度分析图;
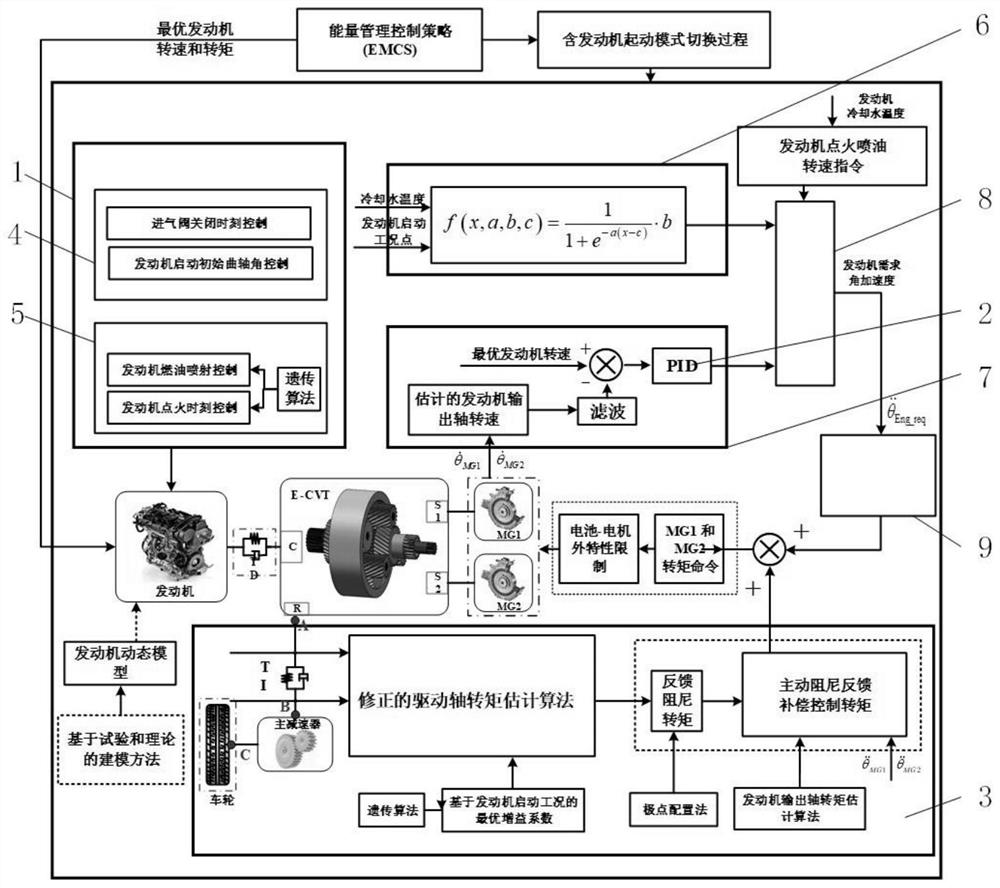
图4为本说明书实施例一提供的发动机启动工况模式切换的动态转矩协调控制系统的结构框图;
图5为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法的发动机点火前进气阀关闭时刻控制示意图;
图6为基于发动机运转工作循环的发动机动态特性图;
图7为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法的发动机燃油喷射量和点火时刻优化流程示意图;
图8为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法的发动机燃油喷射量和点火时刻优化结果图;
图9为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法的发动机转速的二次导数仿真结果图;
图10为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法的点火前优化的发动机需求角加速度图;
图11为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法的最优增益系数求解流程示意图;
图12为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法的阻尼反馈控制前后系统伯德图;
图13为本说明书实施例二提供的发动机启动工况模式切换的动态转矩协调控制方法基于根轨迹的零极点分布图。
具体实施方式
下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,本说明书实施例及附图中的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
实施例一
本说明书实施例一公开了一种发动机启动工况模式切换的动态转矩协调控制系统。以下分别进行详细说明。
图4是示出了根据本说明实施例一提供的一种发动机启动工况模式切换的动态转矩协调控制系统。如图4所示,发动机启动工况模式切换的动态转矩协调控制系统包括发动机分段主动控制模块1、启动前馈和反馈控制模块、主动阻尼反馈补偿控制模块3。
本发明实施例一采用发动机分段主动控制模块1、启动前馈和反馈控制模块、主动阻尼反馈补偿控制模块3相结合的动态转矩协调控制系统,尽可能地减小了不同发动机启动工况下模式切换过程中系统的冲击和振动,改善了不同发动机启动工况下的整车驾驶舒适性。
发动机分段主动控制模块1用于通过控制点火前电启动发电机阶段进气阀关闭时刻、发动机启动初始曲轴角的输入以及点火后初始燃烧阶段发动机燃油喷射、发动机点火时刻的输入,调控发动机的输出转矩。进一步的,发动机分段主动控制模块1包括点火前电启动发动机阶段控制模块4和点火后初始燃烧阶段控制模块5;其中,点火前电启动发动机阶段控制模块4用于控制点火前电启动发电机阶段进气阀关闭时刻、发动机启动初始曲轴角的输入,调控发动机的输出转矩,以减小发动机启动过程中自身的脉动转矩;点火后初始燃烧阶段控制模块5用于控制点火后初始燃烧阶段发动机燃油喷射、发动机点火时刻的输入,调控发动机的输出转矩,以减少发动机初始燃烧过程中传动系统的冲击和振动。
启动前馈和反馈控制模块用于通过控制点火前发动机启动工况下的发动机所需角加速度以及点火后发动机达到最佳目标转速所需的角加速度,进而调控两电机的分配转矩。进一步的,启动前馈和反馈控制模块包括前馈控制所需角加速度获取模块6、反馈控制所需角加速度获取模块7、切换开关模块8以及电机转矩分配模块9;其中,通过前馈控制所需角加速度获取模块6获得点火前电启动发动机阶段前馈控制所需的发动机角加速度;通过反馈控制所需角加速度获取模块7获得点火后发动机燃烧阶段反馈控制所需的发动机角加速度;切换开关模块8用于根据发动机点火喷油转速指令输出发动机需求角加速度,在点火前电启动发动机阶段,切换开关模块8将发动机需求角加速度的输出切换至前馈控制所需的发动机角加速度,在点火后发动机燃烧阶段,切换开关模块8将发动机需求角加速度的输出切换至反馈控制所需的发动机角加速度;电机转矩分配模块9用于基于发动机需求角加速度计算两电机分配转矩。
其中,前馈控制所需角加速度获取模块6将遗传算法优化的“S曲线”函数作为点火前电启动发动机阶段前馈控制所需的发动机角加速度
式中,a、b和c为发动机角加速度
反馈控制所需角加速度获取模块7根据估计的发动机输出轴转速与最优发动机转速的差值获取点火后发动机燃烧阶段反馈控制所需的发动机角加速度,具体的,反馈控制所需角加速度获取模块7包括PID控制器2,PID控制器2根据输入的估计的发动机输出轴转速与发动机最优转速之间的差值,输出反馈控制所需的发动机角加速度。
此外,电机转矩分配模块9中计算两电机分配转矩的分配算法为:
式中,T
主动阻尼反馈补偿控制模块3用于根据修正的反馈阻尼转矩和采用极点配置法确定的反馈增益阻尼系数对电机的主动阻尼反馈补偿控制转矩进行修正;其中,修正的反馈阻尼转矩根据采用遗传算法所获取的基于发动机启动工况下最优增益系数计算得出。
实施例二
本说明书实施例二公开了一种发动机启动工况模式切换的动态转矩协调控制方法。以下分别进行详细说明。
为尽可能地减小不同发动机启动工况下模式切换过程中系统的冲击和振动,改善不同发动机启动工况下的整车驾驶舒适性,本发明实施例二提出了一种发动机启动工况模式切换的动态转矩协调控制方法,所述动态转矩协调控制方法包括发动机分段主动控制过程、发动机启动的前馈和反馈控制过程以及基于发动机启动工况的主动阻尼反馈补偿控制过程。
发动机工作过程的通用方程组为:
其中,
在上述式中,T
由上述发动机工作过程的通用方程组可知,由于点火前发动机气缸内的温度和气体常数变化不大,发动机瞬时缸内压力P
在本发明实施例二的发动机分段主动控制中,在点火前电启动发动机阶段,控制进气阀关闭时刻以及发动机启动初始曲轴角的输入,进而控制发动机的输出转矩,减小发动机启动过程中自身的脉动转矩。在一个具体的实施例中,对进气阀关闭时刻和发动机启动初始曲轴角进行优化,优化后的进气阀关闭时刻为150deg,发动机启动初始曲轴角为165度。
四缸发动机总脉动转矩T
在上述式中,θ
如图5所示,θ
在点火前电启动发动机阶段,当发动机启动初始曲轴角θ
在点火前电启动发动机阶段,当发动机进气阀关闭时刻IVCT对应的角度θ
因此,根据发动机进气阀关闭时刻IVCT和发动机启动初始曲轴角ICA对发动机输出轴转矩的影响,进气阀关闭时刻优选为150deg,发动机启动初始曲轴角优选为165度,从而实现以发动机动力源主动控制出发减小发动机启动过程自身的脉动转矩的目的。
如图6所示,EV模式切换到ECVT模式过程包括四个工作阶段:制动器B1锁止的EV阶段、制动器B1打开过程的EV阶段、发动机点火前的电启动发动机阶段以及发动机点火后的ECVT模式混合驱动阶段。发动机曲轴转角每旋转720deg为一个工作循环,从图6(b)可知,在前5个发动机工作循环中整车等效冲击度相对较大,且发动机点火后的ECVT模式混合驱动阶段中前3个工作循环(3
在本发明实施例二的发动机分段主动控制中,在点火后发动机初始燃烧阶段,控制发动机燃油喷射以及发动机点火时刻的输入,进而改变发动机的输出转矩,减少发动机初始燃烧过程中传动系统的冲击和振动。在一个具体的实施例中,采用遗传算法优化所述发动机燃油喷射以及发动机点火时刻。具体的,根据发动机工作循环和冷却水温度,采用遗传算法对发动机点火后前3个工作循环的燃油喷射量F
发动机点火后的ECVT模式混合驱动阶段中前3个工作循环的燃油喷射量F
F
在上式中,C
在发动机启动的初始燃烧过程中,发动机的点火角和喷油量过大或过小都会导致发动机出现燃烧失火的现象,因此,发动机点火角和喷油量需要被约束在一定范围内以保证发动机顺利地启动。在本实施例二中,发动机试验数据的缸内燃烧失火约束条件为:
式中:发动机在上止点进行点火时点火时刻θ
从图6(b)还可知,发动机输出轴转速的二次导数
结合图7所示,遗传算法优化发动机燃油喷射以及发动机点火时刻的具体步骤包括:
步骤101、建立复合插电式混合动力汽车PS-PHEV仿真模型。
具体的,为采用遗传算法优化发动机燃油喷射以及发动机点火时刻,建立复合PS-PHEV仿真模型,以提供优化平台。
步骤102、基于复合PS-PHEV仿真模型,发动机系统接收点火命令后,进入第j个工作循环,并确定发动机冷却水温度;其中,j=3,4,5。
具体的,在步骤1所建立的复合PS-PHEV仿真模型上,向发动机系统发送点火命令,发动机接收之后进入工作循环,发动机系统确定发动机目前处于第j个工作循环,并确定发动机冷却水温度。
步骤103、在发动机缸内燃烧失火约束条件下,遗传算法自动初始化燃油喷射系数和点火时刻,以得到不同燃油喷射量和点火时刻下的缸内压力,并计算得出发动机总脉动转矩。
具体的,在发动机试验数据的缸内燃烧失火约束条件下,遗传算法自动初始化燃油喷射系数C
步骤104、根据发动机总脉动转矩和复合PS-PHEV仿真模型,计算适应度函数,根据适应度值选取最优的燃油喷射量和点火时刻。
具体的,基于发动机总脉动转矩和复合PS-PHEV仿真模型计算适应度函数F
步骤105、当满足遗传算法迭代的终止条件,退出循环,输出最优的燃油喷射量和点火时刻。
具体的,判断当前是否达到遗传算法的终止条件,当满足遗传算法迭代的终止条件,退出循环,输出最优的燃油喷射量和点火时刻;当不满足遗传算法迭代的终止条件,从步骤104返回至步骤102,重新进行循环,直至满足遗传算法迭代的终止条件为止。
在具体的实施例中,设定冷却水温度为25℃,采用上述所述的遗传算法优化发动机燃油喷射以及发动机点火时刻,如图8和图9所示,获得发动机点火后的ECVT模式混合驱动阶段中前3个工作循环的仿真结果。
由图8(a)可知,第3个工作循环(即点火后第一个工作循环)的燃油喷射量比优化前提高了20%,这主要是通过适当增加冷启动点火后第一个工作循环的喷油量来提高点火的可靠性,并在进气道内形成足够的油膜。而在第4和第5个工作循环中,燃油喷射量减少到了基本燃油喷射量的40%。在图8(b)中的点火后三个工作循环可以看出,优化后的点火时刻都比优化前的点火时刻推迟了,这也说明了通过推迟点火时刻能够有效减少发动机输出转矩的波动。从图9可以看出,优化后的发动机转速二次导数
发动机的需求角加速度
在点火前电启动发动机阶段,将基于遗传算法优化的“S曲线”函数作为前馈控制所需的发动机角加速度
式中,a、b和c为
在发动机启动的前馈控制中,为了获得不同发动机启动工况点下的最优发动机需求角加速度,以整车冲击度的绝对值为适应度函数,在给定的冷却水温度下采用遗传算法对发动机启动工况点下的a、b和c参数进行优化,以获得最优的“S曲线”函数,即点火前最优的发动机需求角加速度。如图10可知,为了尽量的减小整车冲击度,在不同的发动机启动工况点(C、D、E和F)下具有不同的发动机需求角加速度。
在点火后发动机燃烧阶段,PID控制器根据估计的发动机输出轴转速与发动机最优转速之间的差值输出反馈控制所需的发动机角加速度,根据反馈控制所需的发动机角加速度利用两电机分配转矩的分配算法得到点火后反馈控制所需的两电机分配转矩。
在基于发动机启动工况的主动阻尼反馈补偿控制过程中,为了进一步减小含有发动机启动模式切换过程中传递到车轮上的转矩波动,并进一步抑制传动系统的振荡,采用遗传算法对驱动轴转矩观测器的最优增益系数L进行求解,利用所获得的最优增益系数L计算驱动轴估计转矩,根据所述驱动轴估计转矩获取反馈阻尼转矩,并采用极点配置法确定所述主动阻尼反馈补偿控制中的反馈增益阻尼系数,根据所述反馈阻尼转矩、反馈增益阻尼系数对电机的主动阻尼反馈补偿控制转矩进行修正。
其中,两个电机的主动阻尼反馈补偿控制转矩(T
在上述表达式中,T
其中,估计的发动机输出轴转矩
为了减少驱动轴自身的共振和减少传递到车轮处系统的转矩波动,将反馈阻尼转矩T
在上述表达式中,
为了获得更准确的驱动轴估计转矩,采用遗传算法对驱动轴转矩观测器的最优增益系数L进行求解,以使所获得的最优增益系数L能够适应于不同的发动机启动工况点。
其中,获得基于不同发动机启动工况点的角加速度最大误差矩阵H是获得最优增益系数的关键,将角加速度最大误差矩阵H定义为:
式中,γ为齿圈转矩估计的最大误差系数,T
由于齿圈处需求转矩T
T
齿圈处角加速度最大误差h
其中,
T
T
I
I
式中,β
结合图11所示,采用遗传算法对驱动轴转矩观测器的最优增益系数L进行求解具体步骤包括:
步骤201、加载初始化条件(G,I),确定角加速度最大误差矩阵。
步骤202、根据期望收敛时间确定误差衰减系数K
步骤203、建立LMIs结构,得到合适的约束条件。
在一个具体实施例中,LMIs结构表示为:
式中,L(V
步骤204、采用遗传算法获得K
具体的,由步骤203所得合适的约束条件求解最优增益系数的适应度函数,并采用遗传算法获取K
在一个具体的实施例中,最优增益系数的适应度函数为:
在本发明实施例二中,基于从齿圈输出轴(A点处)到等效TI轴处(B点处)的弹簧–质量简化模型,可得从A点到B点的传动系统传递函数:
在上述传动系统传递函数中,I′
图12示出了传递函数G
将反馈增益阻尼系数f
图13为基于根轨迹的零极点分布图,用于对传动系统极点进行配置,传动系统传递函数G′
综上所述,本说明书公开一种发动机启动工况模式切换的动态转矩协调控制系统和方法,采用发动机分段主动控制、发动机启动的前馈和反馈控制和基于发动机启动工况的主动阻尼反馈补偿控制相结合的动态转矩协调控制系统及其方法,尽可能地减小了不同发动机启动工况下模式切换过程中系统的冲击和振动,改善了不同发动机启动工况下的整车驾驶舒适性。
本领域普通技术人员可以理解:附图只是一个实施例的示意图,附图中的模块或流程并不一定是实施本发明所必须的。
本领域普通技术人员可以理解:实施例中的装置中的模块可以按照实施例描述分布于实施例的装置中,也可以进行相应变化位于不同于本实施例的一个或多个装置中。上述实施例的模块可以合并为一个模块,也可以进一步拆分成多个子模块。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
- 发动机启动工况模式切换的动态转矩协调控制系统和方法
- 启动混合动力车辆内燃机以用于从电动模式切换到混合动力模式时的转矩控制方法