用于生物机器人的运动神经节电刺激电路及电刺激方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及一种用于生物机器人的运动神经节电刺激电路及电刺激方法。
背景技术
生物机器人是根据动物运动行为的神经生物学原理,选取活体动物的相关脑区,将运动功能和现代电子技术、传感技术、网络控制等技术结合来实现对动物脑电信号的人为控制。由于生物机器人研究在神经科学与工程、国家安全等领域具有重要的理论和应用价值,特别是它具有天然隐蔽性和抗恶劣外部(如雷电、大风等)干扰以及具备自身运动能源供给等突出优点,目前已经成为备受关注的国内外前沿研究课题之一。自上世纪90年代末,科学界开始研究生物机器人运动控制技术,它是电子信息技术、微制造技术和神经生物学高度发展与相互融合的产物,是目前交叉学科发展最活跃的领域之一。
生物机器人的电刺激方案需要满足诸多要求。由于生物电刺激存在个体差异性,需要电刺激信号可以动态调整;生物体本身是导体,各个刺激通道之间容易产生串扰;生物体电阻值较大,需要刺激电路具备较强的带载能力。
现有技术中,通过微控制单元控制IO口直接输出电刺激波形。该技术方案的缺陷在于:1、无法根据生物个体差异性对电刺激信号的幅值进行调整;2、无法解决多个刺激通道相互串扰问题;3、驱动负载能力不足。现有技术的方案虽然电路设计简单,但是控制精度和通用性较差。电刺激信号波形需要在设计电路时就要确定,不具备调节能力,需要针对性的定制,无法应用于不同生物平台上。
因此,如何提供一种满足生物体个体差异性要求、通道隔离要求和负载能力要求的电刺激电路及电刺激方法成为了业界需要解决的问题。
发明内容
针对现有技术的缺点,本发明的目的是提供一种用于生物机器人的运动神经节电刺激电路及电刺激方法,其主要面对生物个体差异性、通道隔离和负载能力这三个方面对刺激电路进行设计,同时也使该刺激电路兼顾扩展性。
为了实现上述目的,一方面,本发明提供了一种用于生物机器人的运动神经节电刺激电路,该电刺激电路包括:
微控制单元,用于调节刺激信号波形;微控制单元包括用于产生输入信号的数模转换器;
放大器,用于放大输出信号电压幅值,增加刺激电路驱动负载能力,以及将来自于数模转换器的输入信号放大并输出为至少一个刺激信号;
至少一个刺激通道,该刺激通道与刺激信号数目相同且对应设置;每一刺激通道包括控制IO、模拟开关、地线IO;其中模拟开关设置于控制IO和地线IO之间,用于配合微控制单元实现单个刺激通道的电气隔离;模拟开关通过电极接入生物体的运动神经节;从生物体引出电极接入地线IO。
本发明中,通过微控制单元(MCU)的数模转换器(DAC)输出参考信号作为放大器的输入端,可实现对电刺激信号幅值的调节,通过控制IO可以实现对刺激信号波形和占空比的调节,从而实现输出的电刺激信号参数可调节。
本发明中,通过模拟开关和地线IO实现对神经节的隔离,从而实现通道隔离,避免各个刺激通道之间产生串扰。
本发明中,通过采用放大器做电刺激电路的输出端,能够大幅提高驱动负载能力,从而实现高驱动负载能力。
本发明的电刺激电路主要从模拟开关处引出电极接入生物体的运动神经节,然后再从生物体的腹部引出电极接入地线IO,就完成刺激电极的植入。随后即可在微控制单元(MCU)中编程控制数模转换器(DAC)和控制IO实现不同刺激波形的输出,当模拟开关和地线IO都关闭时即可实现对运动神经节的电气隔离。
本发明的电刺激信号幅值、频率、占空比、持续时间均可调;采用微控制单元配合模拟开关的方案实现单个刺激通道的隔离;以驱动负载能力较弱的DAC信号作为输入信号,经过放大器放大后形成较强负载能力的电压总线为各个刺激通道提供刺激信号;本发明使用极少的外围电子元器件配合微控制器,实现了刺激信号波形动态调整、刺激通道易于扩展、刺激期间无明显压降、单个刺激通道电气隔离四个功能。
根据本发明另一具体实施方式,刺激信号的数目为2-6个,且均相同。这里需要强调的是,不管设有几个刺激通道,刺激信号均相同。
根据本发明另一具体实施方式,从生物体的腹部引出电极接入地线IO。
根据本发明另一具体实施方式,放大器的放大倍数为2-3倍。
根据本发明另一具体实施方式,生物体为蟑螂、甲虫、蝗虫或者鲤鱼。
另一方面,本发明提供了一种生物机器人神经节电刺激方法,其包括如下步骤:
A、从模拟开关处引出电极接入生物体的运动神经节,然后再从生物体的腹部引出电极接入地线IO,完成刺激电极的植入;
B、微控制单元的数模转换器产生输入信号;
C、放大器接收输入信号,放大并输出为至少一个刺激信号;
D、各刺激信号进入对应的刺激通道;每一刺激通道中,设有控制IO、模拟开关、地线IO,刺激信号由放大器输出,经模拟开关到达生物体的运动神经节。
上述电刺激方法进一步包括步骤E:关闭模拟开关和地线IO,实现对运动神经节的电气隔离。
具体地,步骤B中,在微控制单元中编程控制数模转换器,产生不同刺激波形作为输入信号。
具体地,刺激信号的数目为2-6个,且均相同;放大器的放大倍数为2-3倍。
具体地,生物体为蟑螂、甲虫、蝗虫或者鲤鱼。
与现有技术相比,本发明具备如下有益效果:
本发明改进传统的IO口直接产生矩形波形成电刺激信号方式,采用DAC控制放大器,通过地线IO和模拟开关对刺激区域进行隔离,以极少数量的外围器件(模拟开关、电阻等)解决传统刺激电路存在的诸多问题,成功实现以下功能:
1、电刺激信号幅值、频率、占空比、持续时间均可调,以应对生物个体差异性;
2、采用地线IO和模拟开关实现单个刺激通道的隔离,避免刺激时出现相互干扰的情况;
3、把负载能力较弱的DAC作为输入信号,使放大器作为刺激信号直接输出来源,因此具有较高的带载能力,能够有效避免刺激输出时电压降低;
4、每个刺激通道使用的外围电子元器件极少(仅需模拟开关及必要电阻),易于扩展刺激通道的数量。
下面结合附图对本发明作进一步的详细说明。
附图说明
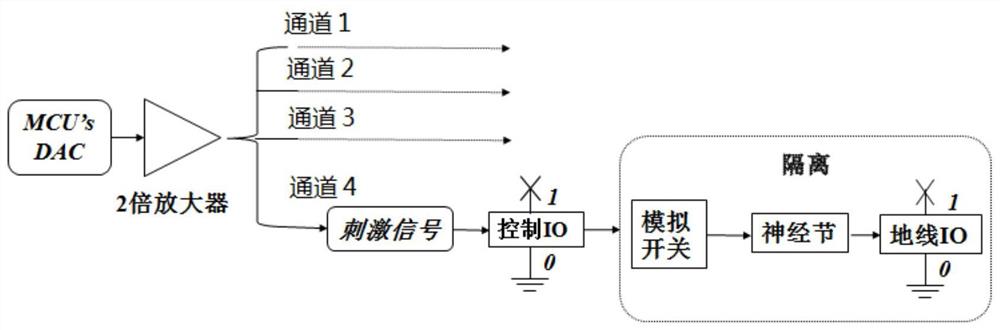
图1是实施例1中,刺激电路的电路原理图;
图2是实施例1中,微控制单元的电路原理图;
图3是实施例1中,刺激信号的产生流程图。
具体实施方式
实施例1
本实施例提供了一种适用于蟑螂生物机器人的运动神经节电刺激电路,如图1-图2所示,该电刺激电路包括:微控制单元U13、2倍放大器U12、四个刺激通道。
其中,微控制单元U13用于调节刺激信号波形;微控制单元包括用于产生输入信号的数模转换器(DAC);图2所示为微控制单元U13及其外围电路,负责电刺激信号的开断、波形调整和状态显示。
2倍放大器U12用于放大输出信号电压幅值,增加刺激电路驱动负载能力,以及将来自于数模转换器的输入信号放大并输出为四个相同的刺激信号;图1所示是放大器U12及其外围电路,负责将微控制单元U13产生的刺激信号进行放大,提升刺激电路驱动负载的能力。
四个刺激通道与四个刺激信号对应设置;每一刺激通道包括控制IO、模拟开关、地线IO,其中模拟开关设置于控制IO和地线IO之间,用于配合微控制单元实现单个刺激通道的电气隔离;模拟开关通过电极接入生物体的运动神经节;从生物体的腹部引出电极接入地线IO。本实施例中设有两个模拟开关U10、U11,每个模拟开关控制2个刺激通道。模拟开关U10、U11的具体电路如图1所示。
本实施例同时提供了一种适用于蟑螂生物机器人的运动神经节电刺激方法,如图3所示,该刺激方法包括如下步骤:
A、从模拟开关处引出电极接入生物体的运动神经节,然后再从生物体的腹部引出电极接入地线IO,完成刺激电极的植入;
B、微控制单元的数模转换器产生输入信号;具体地,在微控制单元中编程控制数模转换器,产生不同刺激波形作为输入信号;
C、2倍放大器接收输入信号,放大并输出为四个刺激信号;
D、四个刺激信号均进入对应的刺激通道;每一刺激通道中,设有控制IO、模拟开关、地线IO,刺激信号由放大器输出,经模拟开关到达生物体的运动神经节;
E、关闭模拟开关和地线IO,实现对运动神经节的电气隔离。
虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
- 用于生物机器人的运动神经节电刺激电路及电刺激方法
- 应用于背根神经节的电刺激系统及其电刺激器