基于多机器人的协同运动方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及多机器人的协同运动技术。
背景技术
多机协同系统广泛应用于大型工程机械器件的焊接、搬运等场合,其要求每个机器人不仅能独立控制,而且还能协调作业。多机器人\附加轴协同作业,不仅能节约硬件成本,还能极大提高生产效率,解决了单个机器人无法完成的工作。
目前,许多机器人厂家仅支持单个机器人与附加轴的协同运动,在多个机器人与同一附加轴协同工作这一技术应用领域还是空白。
发明内容
本发明所要解决的技术问题在于提供一种实现多个机器人与同一附加轴协同运动的方法。
本发明实施例提供了一种基于多机器人的协同运动方法,包括以下步骤:
主机器人获取自身的路径信息、与同步相关的标志位以及附加轴的路径信息,从机器人获取自身的路径信息及与同步相关的标志位;所述路径信息包括路径长度和运动约束条件;
主机器人获取从机器人的与同步相关的标志位,根据与同步相关的标志位判断主机器人与从机器人是否满足同步运动条件;
若主机器人与从机器人满足同步运动条件,则主机器人获取从机器人的路径信息,计算主机器人、从机器人和附加轴的合成路径长度以及合成路径的运动约束条件,对合成路径进行实时插补运算,得到合成路径的插补点;
主机器人根据合成路径的插补点分别按照主机器人路径长度与合成路径长度的比例、附加轴路径长度与合成路径长度的比例以及从机器人路径长度与合成路径长度的比例实时计算主机器人的插补点、附加轴的插补点和从机器人的插补点,并将从机器人插补点发送给从机器人;
主机器人根据主机器人的插补点控制主机器人运动,并根据附加轴的插补点控制附加轴运动,从机器人根据从机器人的插补点控制从机器人运动。
本发明至少具有以下优点:
1、本发明实施例的多机器人的协同运动方法可以实现多台机器人与同一附加轴协同作业;
2、本发明实施例的多机器人的协同运动方法具有易于实现的优点,现有的机器人控制器在无须改变软件架构和算法架构的情况下即可实现本发明实施例的多机器人的协同运动方法。
附图说明
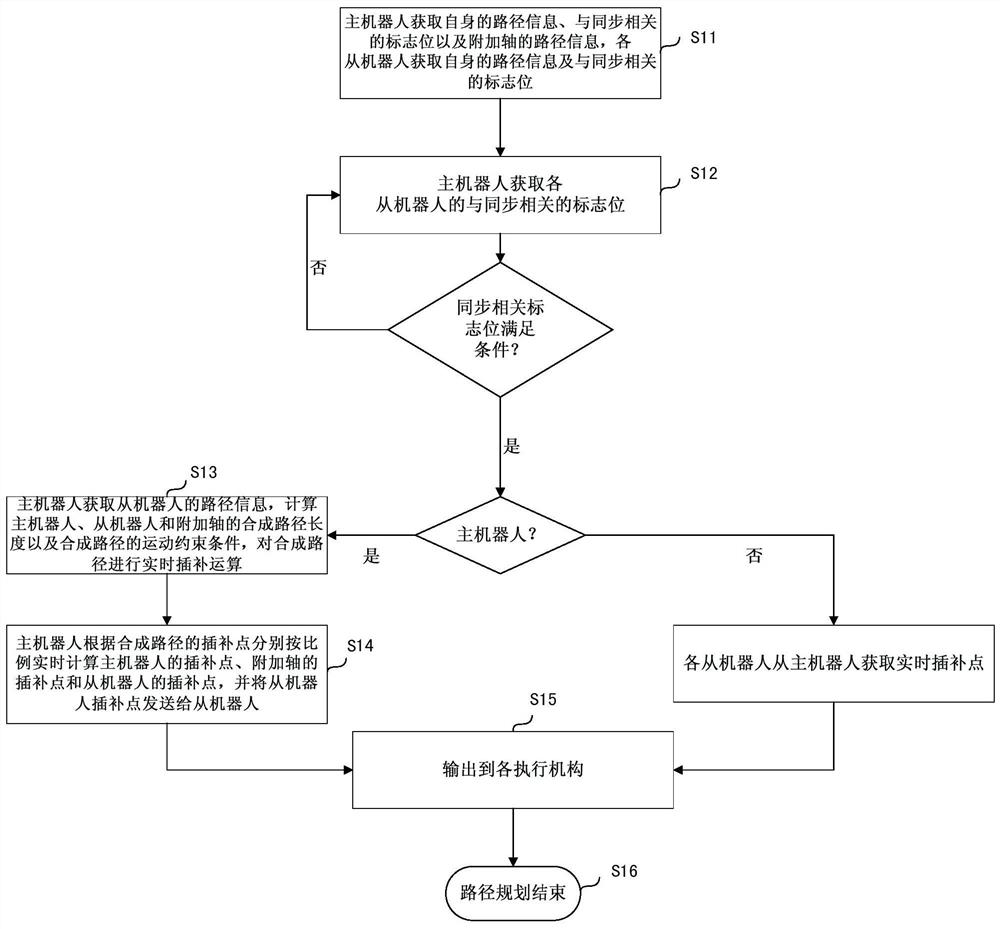
图1示出了根据本发明一实施例的基于多机器人的协同运动方法的流程示意图。
具体实施方式
请参阅图1。根据本发明一实施例的一种基于多机器人的协同运动方法,包括以下步骤:
步骤S11、主机器人获取自身的路径信息、与同步相关的标志位以及附加轴的路径信息,从机器人获取自身的路径信息及与同步相关的标志位;所述路径信息包括路径长度和运动约束条件。
在本实施例中,主机器人通过示教获得自身路径的起始点位姿和终止点位姿、以及附加轴的路径的起始点位姿和终止点位姿,并根据自身路径的起始点位姿和终止点位姿计算出主机器人的路径长度,根据附加轴的起始点位姿和终止点位姿计算出附加轴的路径长度,主机器人的运动约束条件、与同步相关的标志位以及附加轴的运动约束条件由外部给定;从机器人通过示教获得自身路径的起始点位姿和终止点位姿,并根据起始点位姿和终止点位姿计算出从机器人的路径长度,从机器人的运动约束条件以及与同步相关的标志位由外部给定。
前述的运动约束条件包括路径的最大速度、最大加速度和最大加加速度。只有主机器人能控制附加轴,从机器人作为主机器人的控制对象,不能控制附加轴,但如有需要可以从主机器人读取附加轴的位置。
与同步相关的标志位包括同步标志号、圆滑标志位(如有需要)等,这些标志位在本实施例中均为二进制数字。
步骤S12、主机器人获取从机器人的与同步相关的标志位,根据与同步相关的标志位判断主机器人与从机器人是否满足同步运动条件。
在本实施例中,主机器人分别与从机器人和附加轴通过总线通信连接,从机器人会将自身的路径信息以及与同步相关的标志位发送给主机器人。主机器人判断自身的同步标志号与从机器人的同步标志号是否一致,如果一致,则判断主机器人与从机器人满足同步运动条件。在其它的实施方式中,主机器人也可以采用其它的实施方式与从机器人和附加轴进行通信。
步骤S13、若主机器人与从机器人满足同步运动条件,则主机器人获取从机器人的路径信息,计算主机器人、从机器人和附加轴的合成路径长度以及合成路径的运动约束条件,在满足合成路径的运动约束条件的情况下对合成路径进行实时插补运算,得到合成路径的插补点。
合成路径的计算包括但不限于对主机器人和从机器人的路径长度求平方和的平方根、相加求广义长度等等。若主机器人与从机器人不满足同步运动条件,则主机器人和从机器人各自等待,不进行运动。
步骤S14、主机器人根据合成路径的插补点分别按照主机器人路径长度与合成路径长度的比例、附加轴路径长度与合成路径长度的比例以及从机器人路径长度与合成路径长度的比例实时计算主机器人的插补点、附加轴的插补点和从机器人的插补点,并将从机器人插补点发送给从机器人;
步骤S15、主机器人根据主机器人的插补点控制主机器人运动,并根据附加轴的插补点控制附加轴运动,从机器人根据从机器人的插补点控制从机器人运动。
主机器人和从机器人获取了当前周期各自的插补值后,按照各自当前的插补空间(笛卡尔空间或关节空间)、工具、坐标系等计算当前周期各自的关节角,并下发给各自的执行机构,主机器人还要控制附加轴实际动作,从机器人配置虚拟附加轴,从机器人能实时获取当前附加轴位置,用于更新附加轴坐标系。
步骤S16、主机器人判断合成路径规划结束,则主机器人和从机器人的路径规划均结束。
下面以两台机器人和一个附加轴完成一个大型油箱焊缝的焊接为例对本发明实施例的工作原理和工作过程进行进一步描述。
本应用实例中,附加轴为一具有单个自由度的机械装置,油箱安装在该附加轴上,且能被附加轴驱动做圆周运动。两台机器人中,主机器人和从机器人的身份基于指定而获得。主机器人需要先标定该附加轴相对于主机器人基坐标系的位置,从机器人也同样需要标定该附加轴相对于从机器人基坐标系的位置。从机器人与附加轴虽然没有实际的硬件连接,但从机器人能实时读到附加轴的位置。
首先,主机器人在油箱右侧示教其运动路径的起始点位姿和终止点位姿,且附加轴运动180°,标记主机器人的同步标志号为1,圆滑标志位为0;从机器人在油箱左侧示教其运动路径的起始点位姿和终止点位姿,标记同步标志号为1,圆滑标志位为0。主机器人根据起始点位姿和终止点位姿计算出自身的路径长度即为100(主机器人要焊接的焊缝长度为100mm),附加轴的运动长度为180(附加轴要转动180°),从机器人根据自身路径的起始点位姿和终止点位姿计算出自身的路径长度为200(从机器人要焊接的焊缝长度为200mm)。主机器人的路径的最大速度、最大加速度和最大加加速度分别给定为100mm/秒、1000mm/平方秒、5000mm/立方秒,从机器人的路径的最大速度、最大加速度和最大加加速度分别给定为100mm/秒、1000mm/平方秒、5000mm/立方秒,附加轴的路径的最大速度、最大加速度和最大加加速度分别给定为10°/秒、100°/平方秒、500°/立方秒。
然后,主机器人获取从机器人与同步相关的相关标志位,由于二者同步标志号一致,主机器人会获取从机器人的路径信息,并计算主机器人、从机器人和附加轴的合成路径长度L为:
L=100+200+180 (1.1)
L为广义长度,无单位。则各系统运动占比w1、w2、w3计算为:
合成路径的运动约束为各子系统的运动约束条件除以各自占比的最小者,最大速度vel、最大加速度acc、最大加加速度jerk,具体为:
式(1.3)中的约束条件只是为了规划合成路径而计算的约束,亦无单位。这样按照合成运动约束条件规划的轨迹能保证各子系统不会超出各自给定的运动约束条件。
当主机器人的圆滑标志位和从机器人的圆滑标志位均为事先指定值(本应用实施中事先指定值为1)时,主机器人才会采用平滑过渡的插补方式对合成路径进行实时插补运算,由于主机器人的圆滑标志位和从机器人的圆滑标志位均为0,因此本应用实施中不采用平滑过渡的插补方式。平滑过渡的方式有多种,如插入中间路径、位置直接叠加等。
主机器人根据合成约束条件(以不超过主机器人、附加轴、从机器人的最大速度、最大加速度、最大加加速度为约束)规划合成路径,得到合成路径的插补点。
主机器人根据合成路径的插补点分别按照主机器人路径长度与合成路径长度的比例100/480、附加轴路径长度与合成路径长度的比例180/480以及从机器人路径长度与合成路径长度的比例200/480实时计算主机器人的插补点、附加轴的插补点和从机器人的插补点,并将从机器人的插补点发送给从机器人。
主机器人根据主机器人的插补点控制主机器人运动,并根据附加轴的插补点控制附加轴运动,从机器人根据从机器人的插补点控制从机器人运动。本实施例中,由于路径为笛卡尔路径,因此,主机器人分别对主机器人的插补点和附加轴的插补点进行逆运动学计算,得到主机器人的各关节的运动控制指令以及附加轴的运动控制指令,用得到的运动控制指令控制主机器人和附加轴运动;从机器人对从机器人的插补点进行逆运动学计算,得到从机器人的各关节的运动控制指令,用得到的运动控制指令控制从机器人运动。这样,主机器人、从机器人及附加轴都按照当前周期实际应该插补的位置运动,即可实现同步运动,三者也一定是同时开始运动并同时结束运动。
在其它的实施方式中,若路径为关节空间的路径,则获得的插补点无需进行逆运动学计算,可直接用插补点控制器机器人和附加轴运动。
本实施例所述的多机器人协同运动包括协同运动(时间同步)以及半协同运动(开始点同步)。从机器人的台数不限于上述应用实例中的一台从机器人,也可以是多台。
本发明实施例的多机器人的协同运动方法可以实现多台机器人与同一附加轴协同作业,满足诸如大型油管焊接、协同举重物等领域的工业应用。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 基于多机器人的协同运动方法
- 一种基于多视点几何的多机器人协调运动方法