一种全自动大蒜精准调姿输送装置及其大蒜输送方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明属于农业生产设备领域,具体涉及一种全自动大蒜精准调姿输送装置及其大蒜输送方法。
背景技术
大蒜是我国各种菜系中不可缺少的调料,大蒜特有的调香、提味效果使其受到了各家庭的青睐。我国是一个产蒜、用蒜大国,中国的大蒜种植面积达70万公顷左右,占全球大蒜种植面积的60%以上。
目前用户在市场上购买的大蒜基本上都是经过剥皮清洗后的蒜瓣,特别对于一些餐馆来说,购买回来的蒜瓣还需要进行切除根盘加工。而目前切除根盘绝大多数是人工进行,也有少量机器加工,但机器加工时必须将根盘朝上或者朝下进行输送,因而在机器加工时需要人工上料输送,从而限制了整个切除根盘的效率。因此,很有必要提出一种自动将蒜瓣根盘朝上或者朝下调整输送的输送装置,来提高大蒜加工的效率。
发明内容
本发明的目的在于提供一种全自动大蒜精准调姿输送装置及其大蒜输送方法,能够以流水线形式自动对大蒜进行姿态的调整与输送,输出蒜瓣根盘朝下的大蒜,为后续的大蒜根盘全自动切除供料,最终实现从大蒜输送到根盘切除全程自动化。
本发明提供的一种全自动大蒜精准调姿输送装置,包括输送调姿模块和送料机构;所述的送料机构包括链传动机构、输送推板和支撑板;多块输送推板沿链传动机构的链条输送方向依次排列成环形,各输送推板由链传动机构驱动同步且间歇性运动;所述的输送推板上设有垂直于链条输送方向的n个大蒜容纳槽,n≥3;两块支撑板沿链条输送方向间距固定在机架上,且均位于链传动机构上顶部工位处的输送推板底部。
所述的输送调姿模块包括调姿安装架、工业相机和调姿机构;所述的调姿机构包括转向组件、连杆组件和拨杆安装架;所述的转向组件包括转向盘电机安装板和置于两块支撑板间距内的n个转向机构;所述的转向盘电机安装板与机架固定;n个转向机构沿垂直于链传动机构的链条输送方向排布,且与输送推板的n个大蒜容纳槽一一对齐;所述的转向机构包括转向盘和转向盘电机;所述的转向盘固定在转向盘电机的输出轴上,转向盘电机的底座固定在转向盘电机安装板上;转向盘的顶面与支撑板的顶面平齐;所述的调姿安装架固定在机架上;所述的工业相机固定在调姿安装架顶部;工业相机位于转向组件上方;连杆组件比转向组件靠近链条的输出端设置,位于送料机构上方,包括步进电机一、带传动机构、摆杆、主动轴、曲柄、V型杆和U型拨杆;所述步进电机一的底座固定在拨杆安装架上;拨杆安装架固定在调姿安装架上;步进电机一的输出轴与主动轴通过带传动机构连接;所述的主动轴与拨杆安装架构成转动副;所述曲柄的一端与主动轴固定;所述摆杆的一端与轴承座一构成转动副,轴承座一固定在拨杆安装架上;所述V型杆的中部与摆杆的另一端铰接,V型杆的一端与曲柄的另一端铰链;所述的U型拨杆固定在V型杆另一端;连杆组件设有沿垂直于链传动机构的链条输送方向排布的n个,且n个连杆组件与输送推板的n个大蒜容纳槽一一对齐,每个连杆组件单独运行进行大蒜姿态的调整。
优选地,所述的链传动机构包括输送轴、链轮和链条;两根输送轴间距布置,其中一根输送轴两端与固定在两个可调轴承座安装板上的两个轴承座二分别构成转动副,另一根输送轴与固定在两个固定轴承座安装板上的两个轴承座二分别构成转动副;每根输送轴两端均固定一个链轮,两根输送轴上同一端位置的每两个链轮通过一条链条连接;所述的可调轴承座安装板与机架上沿链条输送方向布置的滑槽构成滑动副,并与滑槽通过螺栓和螺母连接;所述的固定轴承座安装板固定在机架上;和两个轴承座二构成转动副的输送轴与步进电机二的输出轴通过联轴器连接,步进电机二固定在步进电机固定座上,步进电机固定座固定在固定轴承座安装板上;步进电机二由控制器控制;所述输送推板的两端与两条链条位置对应的两个链节分别固定。
更优选地,所述的链传动机构还包括接近开关;所述的接近开关固定在接近开关安装架上,接近开关的信号输出端接控制器;接近开关安装架固定在轴承座二上。
优选地,所述的输送调姿模块还包括补光灯;所述的补光灯位于转向组件上方,并固定在调姿安装架顶部,与工业相机位于调姿安装架的同一侧。
优选地,所述的带传动机构包括两个同步带轮和连接两个同步带轮的同步带;两个同步带轮分别固定在步进电机一的输出轴和主动轴上。
该全自动大蒜精准调姿输送装置的大蒜输送方法,具体步骤如下:
步骤一、上一道工序间歇性输出沿垂直链传动机构输送方向并排排布且数量与输送推板的大蒜容纳槽数量相等的一排需整理的大蒜,链传动机构输入端的输送推板的每个大蒜容纳槽均落入一个大蒜。
步骤二、链传动机构驱动装有大蒜的输送推板运动,下一个空载的输送推板经过接近开关时,链传动机构停止运动;待上一道工序向接近开关位置处的输送推板投递完大蒜后,链传动机构继续运动。
步骤三、当装有大蒜的输送推板被输送到转向组件上方时,输送推板的各大蒜容纳槽内大蒜分别位于对应一个转向机构的转向盘上,工业相机采集输送推板的各大蒜容纳槽内大蒜姿态信息并传送到控制器进行处理,控制器根据输送推板的每个大蒜容纳槽内大蒜姿态信息控制对应位置的各转向机构旋转,使输送推板的每个大蒜容纳槽内大蒜进行姿态角度调整,让各个大蒜的蒜杆朝向与链传动机构输送方向相反的方向摆放。
步骤四、当装有经姿态角度调整后大蒜的输送推板被进一步输送到连杆组件下方时,输送推板的每个大蒜容纳槽上方对应的一个连杆组件对该大蒜容纳槽内的大蒜进行姿态拨正,使得该大蒜容纳槽内的大蒜蒜杆朝上,具体如下:连杆组件的步进电机一经带传动机构带动曲柄转动,曲柄再带动V型杆和摆杆运动,从而带动V型杆上的U型拨杆拨正大蒜,使得大蒜的蒜杆垂直朝上摆放。
优选地,U型拨杆的运动轨迹为封闭曲线,且U型拨杆在运动轨迹的底部曲线段由链传动机构输入端至输出端运动时拨正大蒜。
优选地,转向组件和连杆组件沿链传动机构输送方向错位的距离等于输送推板的宽度。
优选地,装有经姿态拨正大蒜的输送推板被进一步向前输送,将姿态拨正后的大蒜输出给下一道工序。
本发明具有的有益效果是:
1、本发明实现全自动输送大蒜过程中对大蒜姿态进行精准调整。当装有大蒜的输送推板经过工业相机下方时,工业相机对大蒜姿态进行数据采集并传给控制器进行分析,再控制转向组件进行大蒜姿态角度的调整,最后利用连杆组件实现大蒜姿态的拨正,使得该大蒜容纳槽内的大蒜蒜杆朝上,从而解决大蒜在根盘切除时由于初步调姿不能将蒜瓣根盘精确朝上或者朝下调整输送的问题。其中,转向组件和连杆组件分级调整,提高了大蒜姿态调整的精确度。
2、本发明通过工业相机进行视觉信息采集,可实现大蒜姿态信息精准采集,保证了送料机构中每块输送推板上的大蒜姿态均能够被准确调整,大大提高了大蒜调姿信息采集的准确性。
3、本发明能够以流水线形式自动对大蒜进行姿态的调整与输送,输出蒜瓣根盘朝下的大蒜,为后续的大蒜根盘全自动切除供料,最终实现从大蒜输送到根盘切除全程自动化,大大提高了大蒜生产、加工的效率与准确性。
附图说明
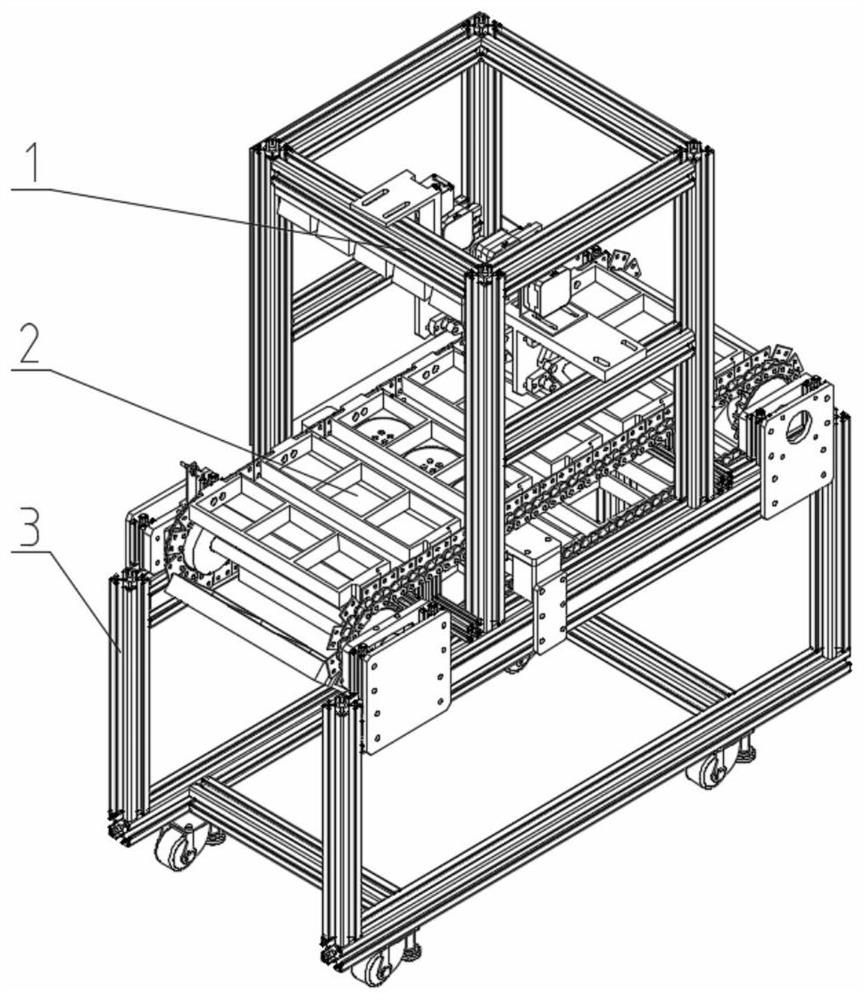
图1为本发明的整体结构示意图;
图2为本发明中输送调姿模块的结构示意图;
图3为本发明中连杆组件和拨杆安装架的装配示意图;
图4为本发明中连杆组件的结构示意图;
图5为本发明中连杆组件的运动轨迹示意图;
图6为本发明中转向组件的结构示意图;
图7为本发明中送料机构的结构示意图;
图8为本发明的控制流程图。
具体实施方式
以下结合附图对本发明作进一步说明。
如图1所示,一种全自动大蒜精准调姿输送装置,包括输送调姿模块1和送料机构2;如图7所示,送料机构2包括链传动机构、输送推板30和支撑板34;多块输送推板30沿链传动机构的链条39输送方向依次排列成环形,各输送推板30由链传动机构驱动同步且间歇性运动;输送推板30上设置有垂直于链条39输送方向的三个大蒜容纳槽;两块支撑板34沿链条39输送方向间距固定在机架3上,且均位于链传动机构上顶部工位处的输送推板30底部,支撑板34为大蒜提供支撑。
如图2、图3、图4和图6所示,输送调姿模块1包括调姿安装架6、工业相机7和调姿机构8;调姿机构8包括转向组件9、连杆组件10和拨杆安装架11;转向组件9包括转向盘电机安装板23和置于两块支撑板34之间的三个转向机构;转向盘电机安装板23通过电机安装板垫块24与连接板25固定,连接板25与机架3固定;三个转向机构沿垂直于链传动机构的链条39输送方向排布,且与输送推板30的三个大蒜容纳槽一一对齐;转向机构包括转向盘22和转向盘电机26;转向盘22固定在转向盘电机26的输出轴上,转向盘电机26的底座固定在转向盘电机安装板23上;转向盘22的顶面与支撑板34的顶面平齐;调姿安装架6固定在机架3上;工业相机7固定在相机安装板4上,相机安装板4固定在调姿安装架6顶部;工业相机7位于转向组件9上方;连杆组件10比转向组件9靠近链条39的输出端设置,位于送料机构2上方,包括步进电机一12、带传动机构、摆杆16、主动轴18、曲柄19、V型杆20和U型拨杆21;步进电机一12的底座固定在步进电机座13上,步进电机座13固定在拨杆安装架11上;拨杆安装架11固定在调姿安装架6上;步进电机一12的输出轴与主动轴18通过带传动机构连接;主动轴18与拨杆安装架11构成转动副;曲柄19的一端与主动轴18固定;摆杆16的一端与轴承座一15构成转动副,轴承座一15固定在拨杆安装架11上;V型杆20的中部与摆杆16的另一端铰接,V型杆20的一端与曲柄19的另一端铰链;U型拨杆21固定在V型杆20另一端;连杆组件10设有沿垂直于链传动机构的链条39输送方向排布的三个,且三个连杆组件10与输送推板30的三个大蒜容纳槽一一对齐,每个连杆组件10单独运行进行大蒜姿态的调整。
其中,转向盘电机26和步进电机一12均由控制器控制,工业相机7的信号输出端接控制器。
作为一个优选实施例,如图7所示,链传动机构包括输送轴35、链轮38和链条39;两根输送轴35间距布置,其中一根输送轴35两端与固定在两个可调轴承座安装板36上的两个轴承座二33分别构成转动副,另一根输送轴35与固定在两个固定轴承座安装板37上的两个轴承座二33分别构成转动副;每根输送轴35两端均固定一个链轮38,两根输送轴35上同一端位置的每两个链轮38通过一条链条39连接;可调轴承座安装板36与机架3上沿链条39输送方向布置的滑槽构成滑动副,并与滑槽通过螺栓和螺母连接,拧松螺栓和螺母,可以调节可调轴承座安装板36在滑槽中的位置,从而对链条39起到张紧作用;固定轴承座安装板37固定在机架3上;和两个轴承座二33构成转动副的输送轴35与步进电机二27的输出轴通过联轴器28连接,步进电机二27固定在步进电机固定座29上,步进电机固定座29固定在固定轴承座安装板37上;步进电机二27由控制器控制;输送推板30的两端与两条链条39位置对应的两个链节40分别固定。
作为一个更优选实施例,如图7所示,链传动机构还包括接近开关31;接近开关31固定在接近开关安装架32上,接近开关31的信号输出端接控制器;接近开关安装架32固定在轴承座二33上。
作为一个优选实施例,如图2所示,输送调姿模块1还包括补光灯5;补光灯5位于转向组件9上方,并固定在调姿安装架6顶部,与工业相机7位于调姿安装架6的同一侧。
作为一个优选实施例,如图4所示,带传动机构包括两个同步带轮17和连接两个同步带轮17的同步带14;两个同步带轮17分别固定在步进电机一12的输出轴和主动轴18上。
如图8所示,该全自动大蒜精准调姿输送装置的大蒜输送方法,具体步骤如下:
步骤一、上一道工序间歇性输出沿垂直链传动机构输送方向并排排布且数量与输送推板30的大蒜容纳槽数量相等的一排需整理的大蒜,链传动机构输入端的输送推板30的每个大蒜容纳槽均落入一个大蒜;进入输送推板30的大蒜在各大蒜容纳槽内处于姿态无序分布的状态。
步骤二、链传动机构驱动装有大蒜的输送推板30运动,下一个空载的输送推板30经过接近开关31时,链传动机构停止运动,实现输送推板30的间歇运动;待上一道工序向接近开关31位置处的输送推板30投递完大蒜(链传动机构停止运动后等待预设时间,通常设置为2-3秒,即认为投递完)后,链传动机构继续运动。
步骤三、当装有大蒜的输送推板30被输送到转向组件9上方时,输送推板30的各大蒜容纳槽内大蒜分别位于对应一个转向机构的转向盘22上,工业相机7采集输送推板30的各大蒜容纳槽内大蒜姿态信息并传送到控制器进行处理,控制器根据输送推板30的每个大蒜容纳槽内大蒜姿态信息控制对应位置的各转向机构旋转,使输送推板30的每个大蒜容纳槽内大蒜进行姿态角度调整,让各个大蒜的蒜杆朝向与链传动机构输送方向相反的方向摆放。
步骤四、当装有经姿态角度调整后大蒜的输送推板30被进一步输送到连杆组件10下方时,输送推板30的每个大蒜容纳槽上方对应的一个连杆组件10对该大蒜容纳槽内的大蒜进行姿态拨正,使得该大蒜容纳槽内的大蒜蒜杆朝上,具体如下:连杆组件10的步进电机一12经带传动机构带动曲柄19转动,曲柄19再带动V型杆20和摆杆16运动,从而带动V型杆20上的U型拨杆21拨正大蒜,使得大蒜的蒜杆垂直朝上摆放。
作为一个优选实施例,如图5所示,U型拨杆21的运动轨迹为封闭曲线,且U型拨杆21在运动轨迹的底部曲线段由链传动机构输入端至输出端运动时拨正大蒜。
作为一个优选实施例,如图1和2所示,转向组件9和连杆组件10沿链传动机构输送方向错位的距离等于输送推板30的宽度。
作为一个优选实施例,装有经姿态拨正大蒜的输送推板30被进一步向前输送,将姿态拨正后的大蒜输出给下一道工序。
- 一种全自动大蒜精准调姿输送装置及其大蒜输送方法
- 一种大蒜收获用切杆切须对齐装置、输送装置及大蒜联合收获机