一种高续航高承重式旋翼无人机
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及无人机领域,特别涉及一种高续航高承重式旋翼无人机。
背景技术
近年来由于微小型多旋翼无人机对飞行环境要求低,价格低廉,操纵简单等优点已经被广泛应用于日常生活的各种领域,包括但不限于农业、交通、测绘、救援等,除了民用和商用等用途外,旋翼无人机还在军事领域发挥着重要作用。
现有的微小型多旋翼无人机存在的一个问题是无人机的续航和载重受限于当今的电池技术,也就是说现有电池的能量密度无法为无人机提供更长的续航时间和载重量,这无疑不很大的限制了多旋翼无人机的进一步推广和应用。
发明内容
针对现有技术的不足,本发明提供了一种高续航高承重式旋翼无人机,该无人机续航能力高、承重能力强。
本发明通过以下技术方案实现:
一种高续航高承重式旋翼无人机,包括机架,所述机架上设置有动力系统、动力切换装置、控制系统以及用于驱动无人机的驱动系统,所述控制系统一端和所述动力切换装置连接,另一端和所述动力系统连接,所述驱动系统和所述动力系统连接,所述动力系统包括发电机组,所述发电机组包括发动机和发电机,所述发动机和发电机传动连接,所述发动机和所述控制系统连接,所述发电机和所述驱动系统连接;在无人机正常飞行时,所述动力切换装置给所述控制系统发送无人机工作的状态信号,信号经所述控制系统判断后可以控制所述发动机的转速和转矩,所述发动机产生的机械能为所述发电机提供转速和转矩,所述发电机转动后稳定输出交流电用于驱动所述驱动系统。
进一步的,所述动力系统还包括储备电池,所述储备电池和所述发电机组并联连接。
进一步的,所述发动机采用高速二冲程汽油发动机,所述发电机采用高功率密度发电机,所述高速二冲程汽油发动机驱动所述高功率密度发电机,所述发电机将所述发动机的机械能转化为电能输出。
进一步的,所述无人机还包括电压输出接口,所述电压输出接口和所述发电机连接。
进一步的,所述电压输出接口包括若干个不同类型不同电压的插孔,所述插孔均和用电设备电性连接。
进一步的,所述动力切换装置包括状态切换开关和若干个按钮,所述状态切换开关用于切换所述无人机状态,所述按钮用于给所述控制系统输入电压信号,且发送出电压信号的按钮和产生对应电压的插孔一一对应。
进一步的,所述机架包括机臂、起落架和设置在所述起落架上的安装板,所述机臂和所述安装板固定连接;所述动力系统、电压输出接口、控制系统和动力切换装置均和所述安装板固定连接。
进一步的,所述电压输出接口和所述动力切换装置相邻设置在所述发电机组的一侧,所述储备电池和所述控制系统相邻设置在所述发电机组的另一侧。
进一步的,所述驱动系统包括若干个驱动单元,所述驱动单元和所述机臂固定连接,用于为所述无人机提供上升力。
进一步的,所述机架采用轻质管状材料,用于固定支撑所述无人机。
相比于现有技术,本发明的优点在于:
1、旋翼无人机动力系统采用串联油电混动的形式,即动力系统包括小容量储备电池的同时还有提供稳态功率需求的发电机组,发电机组由高速二冲程汽油发动机和高功率密度发电机组成,一方面能够减轻无人机整机的质量,提供较大的推重比,另一方面可以为无人机提供较多的能源供给,保障无人机的长续航以及为其他用电设备供电,进而实现发电机组用途的多样化。旋翼无人机有了这一附加功能,不仅能够拓展无人机的应用场景,还能进一步充分利用无人机的发电机组,输出多种常用电压的,为其他户外用电设备直接供电,为许多室外活动提供便利。
附图说明
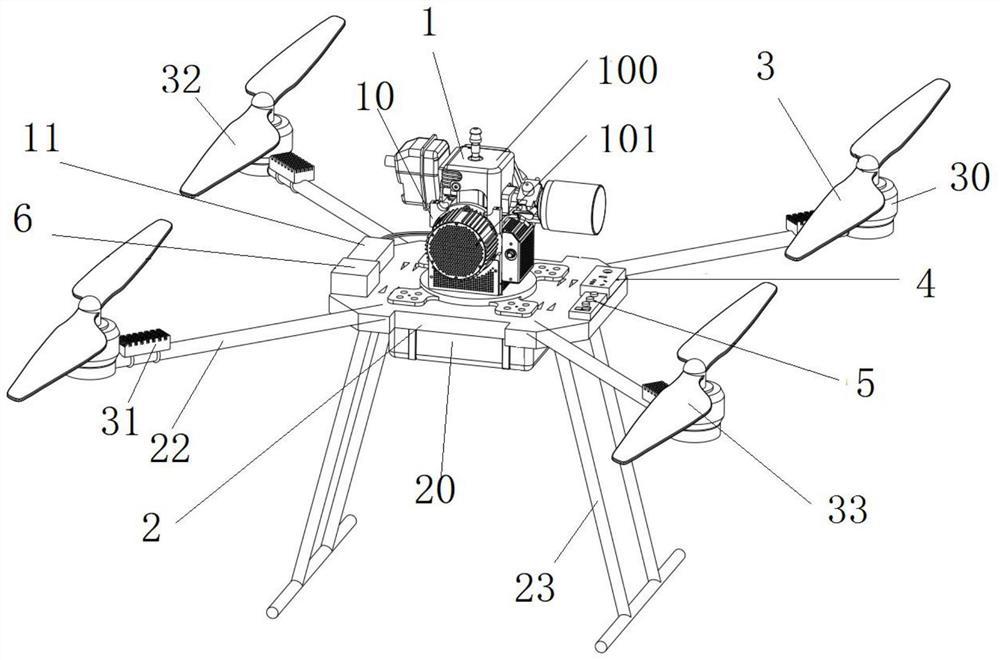
图1为本发明一实施例的一种高续航高承重式旋翼无人机的整体结构示意图;
图2为动力切换装置结构示意图;
图3为电压输出接口结构示意图;
图4为发电机组输出电压原理图;
图5为无人机控制原理图。
1-动力系统、10-发电机组、100-发动机、101-发电机、11-储备电池;2-机架、20-安装板、21-安装孔、22-机臂、23-起落架;3-驱动系统、30-电机、31-电调、32-旋翼、33-驱动单元;4-电压输出接口、40-220V交流插孔、41-12V直流插孔、42-5V直流插孔、43-插孔;5-动力切换装置、50-状态切换开关、51-220V交流按钮、52-12V直流按钮、53-5V直流按钮、54-按钮;6-控制系统。
具体实施方式
以下结合较佳实施例及其附图对发明技术方案作进一步非限制性的详细说明。在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
如图1所示,本发明一实施例的一种高续航高承重式旋翼无人机包括机架2,所述机架2上设置有动力系统1、动力切换装置5、控制系统6以及用于驱动无人机的驱动系统3,所述控制系统6一端和所述动力切换装置5连接,另一端和所述动力系统1连接,所述驱动系统3和所述动力系统1连接。
具体地,机架2起固定支撑的作用,为其他部件的安装使用提供空间和依附;控制系统6起姿态控制及动力分配的作用,即在无人机正常运行时控制无人机的飞行姿态并合理分配动力系统1的动力源;驱动系统3起将动力系统1提供的电能转换为机械能的作用,即将电能转换为升力,保障无人机的正常运转;在无人机不工作时为用电设备7提供所需电压和功率,是旋翼无人机动力源实现多用途的关键部件;动力切换装置6的主要作用是判断无人机的工作状态,在无人机正常运行时为无人机系统提供48V稳定电压和稳定功率,在无人机非工作状态时为用电设备7提供所需电压和功率,并能根据用电设备7所需电压的大小调节发电机组的运转状态进而调节发电电压和发电功率;电压输出接口4的主要作用是为动力系统1不同输出电压提供输出接口,实现动力系统1为用电设备7的供电。
动力系统1包括发电机组10和储备电池11,储备电池11与发电机组10并联,其中储备电池11主要功能是为无人机正常工作状态提供后备功率及稳定电压,以保证无人机的正常运行,发电机组10主要功能是在无人机工作时为无人机提供所需功率和电压,在无人机不工作时为用电设备7提供所需电压和功率,是多旋翼无人机动力源实现多用途的关键部件。无人机的动力系统1的储备电池11选用12S锂离子电池,正常飞行状态时储备电池11起稳压和提供瞬态功率的作用,紧急状态时储备电池11起应急作用,为无人机整机的飞行提供功率和电压,无人机停飞状态时,储备电池11处于空闲状态,不参与为用电设备7供电的过程。
发电机组10主要包括发动机100和发电机101,发动机100和发电机101传动连接,发动机100和控制系统6连接,发电机101和驱动系统3连接;在无人机正常飞行时,所述动力切换装置5给所述控制系统6发送无人机工作的状态信号,信号经所述控制系统6判断后可以控制所述发动机100的转速和转矩,所述发动机100产生的机械能为所述发电机101提供转速和转矩,所述发电机101转动后稳定输出交流电用于驱动所述驱动系统3。其中,发动机100采用高速二冲程汽油发动机,发电机101采用高功率密度发电机;发电机100与发电机101配合使用,发电机101能够直接输出24-48V高压交流电,以供无人机的正常运转,发电机组10中的发电机101采用高功率密度发电机,以尽可能的减轻无人机整机的质量,实现较大的推重比,减小无人机整机的功率消耗。发电机组10的输出电压首先通过负反馈调节,调节发动机100的转速,实现发电机组10的输出电压稳定在48V/24V的需求范围内,再根据具体的用电设备7需求电压或无人机整机需求电压调节发电机组10的输出电压大小和类型(AC/DC),最终实现所需电压的输出。无人机运行状态时,发动机100为发电机101提供高转速和扭矩,发电机101稳定输出48V交流电,经整流器整流后稳定输出48V直流电,进而由发电机组10为无人机的运行提供恒定电压和功率,无人机停飞状态时,发电机组10为用电设备7提供所需电压和功率,实现发电机组的用途多样化。
机架2主要由轻质管状材料构成,机架2包括机臂22、起落架23和设置在起落架23上的安装板20,机臂22和安装板20固定连接;动力系统1、电压输出接口4、控制系统6和动力切换装置5均和安装板20固定连接。电压输出接口4和动力切换装置5相邻设置在发电机组10的一侧,储备电池11和控制系统6相邻设置在发电机组10的另一侧。安装板20设置在机架2的中心位置,用于固定无人机的发电机组1、储备电池11、控制系统6和电压输出接口4等主要零部件;机架2的周围均布管状无人机机臂22,用于安装固定无人机驱动系统3;机架4的下方为无人机起落架23,用于支撑无人机整机的起飞和着陆。
驱动系统3包括若干个驱动单元33,驱动单元33和机臂22固定连接,用于为所述无人机提供上升力。驱动单元33包括若干驱动电机30、电调31、旋翼32,驱动电机30的输出轴和旋翼32连接,电调31和驱动电机30电性连接,各部件间相互配合实现无人机动力形式的转换,为无人机提供升力,进而实现无人机的飞行和姿态控制。
如图3所示,电压输出接口4包括若干个不同类型不同电压的插孔43,插孔43均和用电设备7电性连接。电压输出接口4包括220V交流插孔40、12V直流插孔41和5V直流USB插孔42,所述220V交流插孔40、12V直流插孔41和5V直流USB插孔42均和用电设备7电性连接。
如图2所示,动力切换装置5包括状态切换开关50和若干个按钮54,按钮54包括220V交流按钮51、12V直流按钮52和5V直流按钮53,所述状态切换开关50用于切换无人机状态,所述220V交流按钮51、12V直流按钮52和5V直流按钮53用于给所述控制系统6输入电压信号。通过切换无人机状态切换开关50可以向控制系统6发送无人机工作状态的信号,进而实现发电机组10工况的切换,通过不同的输出电压按钮54可以向控制系统6发送需求电压大小信号,进一步控制发电机组10的工况以及输出电压。动力切换装置5采用微小型控制器的形式,控制器能够判断无人机的工作状态,进而判断是否为无人机供电,当无人机正常运行时,控制器能够控制发电机组10为无人机稳定供给48V恒定电压,当无人机停飞状态时,控制器能够切断为无人机供电的线路并根据用电设备7所需电压调节发电机组10输出电压,进而满足用电设备7的用电需求。
控制系统6主要包括自驾仪(图中未示)、接收机(图中未示)以及在地面与之配合使用的遥控器(图中未示),其中自驾仪是用于控制旋翼32姿态、位置、轨迹的飞行控制系统;接收机和遥控器配合使用,遥控器用于发送飞控手的遥控指令到接收机,接收机解码后传给自驾仪,从而控制旋翼32的飞行姿态。
如图4所示,首先,通过发电机组10的动力切换装置5给控制系统6发送旋翼无人机工作状态的信号,当旋翼无人机处于工作状态时发电机组处于额定工况,此时发电机组10稳定输出48V交流电压,电压经AC/DC整流器整流,输出48V直流电压,并与储备电池11并联,用于为无人机驱动系统3供电。当多旋翼无人机处于停飞状态时,此时通过发电机组10的动力切换装置5给控制系统6发出需求电压数值信号。当需求电压为220V时,发电机组10处于额定工况,此时发电机组10稳定输出48V交流电压,电压经AC/AC变压器升压,输出220V交流电压到220V交流插孔40,实现220V交流电压的供给;当需求电压为12V时,发电机组10处于低速、低功率工况,此时发电机组10稳定输出24V交流电压,电压经AC/DC转化器转化为24V直流电压,再经DC/DC变压器转化输出12V直流电压到12V直流插孔41,实现12V直流电压(车充电压)的供给;当需求电压为5V时,发电机组10同样处于低速、低功率工况,此时发电机组10稳定输出24V交流电压,电压经AC/DC转化器转化为24V直流电压,再经DC/DC变压器转化输出5V直流电压到5V直流USB插孔42,实现5V直流电压(USB电压)的供给。
使用时,如图5所示,动力切换装置5向控制系统6发出多旋翼无人机工作/停飞的状态信号,信号经控制系统6判断处理后按不同工况控制发电机组10的运行状态,若此时多旋翼无人机处于工作工况,则控制系统6通过负反馈调节控制发电机组10中的发动机100转速进而控制发电机101发电电压,使发电电压稳定在48V左右,此时发电机组10发出是48V交流电,再次经控制系统6判断多旋翼无人机的工作状态,若多旋翼无人机处于工作工况,则发电机组发出的交流电经AC/DC整流器整流后为多旋翼无人机的驱动系统3提供48V直流电压。若第一次判断多旋翼无人机工作状态的结果是多旋翼无人机处于停飞状态,则此时需要动力切换装置5为发电机组10提供初始电压信号(需求电压)。该发电机组10能够提供三种电压,分别为220V家用交流电、12V车用直流电、5VUSB用直流电。当动力切换装置5为发电机组提供220V需求电压信号时,控制系统6同样通过负反馈调节控制发电机组10中的发动机100转速进而控制发电机101发电,使发电电压稳定在48V左右,此时发电机组10发出是48V交流电,经AC/AC变压器升压为220V交流电后接220V交流插孔40即可实现220V家用交流电的供给。当动力切换装置5为发电机组10提供12V需求电压信号时,控制系统6通过负反馈调节控制发电机组10中的发动机100转速进而控制发电机101发电电压,使其稳定在24V左右,此时发电机组发出是24V交流电,经AC/DC整流器整流后输出24V直流电,再经DC/DC变压器降压为12V直流电后连接12V直流插孔41即可实现12V车用直流电的供给。当动力切换装置5为发电机组10提供5V需求电压信号时,控制系统6以相同的方式控制发电机组10发电电压,并使其稳定在24V左右,此时发电机组10发出是24V交流电,经AC/DC整流器整流后输出24V直流电,再经DC/DC变压器降压为5V直流电后连接5V直流USB插孔即可实现5VUSB用直流电的供给。无人机的发电机组在多旋翼无人机停飞状态时所提供的电压仅为户外常用电压,本发明的保护范围不应局限与此。本发明采用由高速二冲程汽油发动机和高功率密度发电机组成的串联油电混动系统,该混动系统不仅能够满足无人机的长续航需求还能留有较多的后备能量,于是,我们将这些后备能量做适当转化,实现发电机组10的不同电压输出,并将这些电压用于不同场合,进而实现多旋翼无人机发电机组的用途多样化。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种高续航高承重式旋翼无人机
- 一种高续航的可折叠式四旋翼无人机