一种机械制冷机的多方位高阶自适应振动控制系统
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及了一种机械制冷机的多方位高阶自适应振动控制系统,属于机械制冷机控制系统领域下的振动控制系统领域。可应用于对于对机械制冷机工作产生的振动有多方位的高阶次抑制需求的场合。
背景技术
机械制冷机制冷量大、制冷温度低、效率高、体积小、质量轻,满足了红外探测器、超导滤波等正常工作需要的温度。随着上世纪80年代末牛津型斯特林制冷机的研制成功,机械制冷机的寿命和可靠性得到极大的提高,从而被广泛的应用于红外光电系统、超导量子干涉、低温超导滤波等领域。
然而机械制冷机产生的振动是影响其应用的一个关键因素。用于光电探侧、超导滤波、超导量子干涉的制冷机多为分置式双驱动结构,由压缩机、膨胀机(冷端)组成,运动部件以一定的频率沿轴向做往复运动,外壳、支架产生相应的反作用力,从而引起制冷机的振动。大量实验分析发现,制冷机的振动主要由基频和一系列谐波成分组成,在不同的方位具有不同的复杂特性。机械制冷机的振动对仪器产生极大的危害;振动会带动与冷指相连的探测器件产生往复运动,偏离仪器光学系统的正常“焦深”范围,导致成像模糊,对探测目标的分辨率和定位精度下降。
振动控制系统的最终目的,是降低制冷机所产生的各个方向的多阶次振动,以降低对相连接的载荷的影响。但以往的制冷机主动振动控制系统,多数仅能实现制冷机活塞工作方向的单阶次振动抑制,并且通常仅能有效抑制压缩机部件自身所产生的振动。对于由于其他部件如气库等所产生的各向振动和压缩机自身所产生的非活塞工作方向振动,无法形成有效的抑制,从而导致最终在负载处实现的振动抑制效果有限。
发明内容
1.发明目的
本发明的目的在于,针对现有的机械制冷机振动控制系统存在的问题,结合主动振动控制原理与制冷机系统的具体工作情况,设计一套多方位机械制冷机高阶自适应振动控制系统,能够有效地实现机械制冷机系统多个方位高阶振动的自适应抑制。
2.技术方案
(1)一种机械制冷机的多方位高阶自适应振动控制系统,其特征在于:
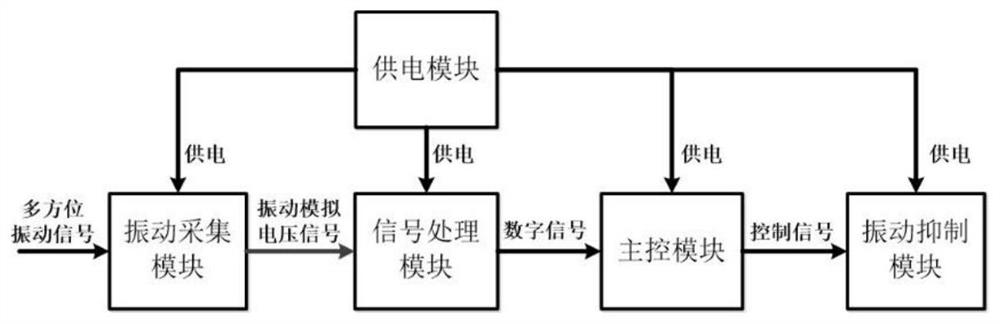
该系统由多向振动采集模块、信号处理模块、主控模块、振动抑制模块和供电模块五个模块组成。多向振动采集模块将采集到的多个方位的振动信号转换为模拟电压信号,传输给信号处理模块,模拟电信号经信号处理模块进行幅值相位调理及滤波后,转换为数字信号传输给主控模块,主控模块通过运行内部的多方位高阶自适应振动控制算法,针对获取到的不同方向的振动信号特性生成对应的控制信号,最终控制振动抑制模块实现各个方位的振动抑制。供电模块将外部供电转化为特定的电压,并供给多向振动采集模块、信号处理模块、主控模块、振动抑制模块这四个模块。
(2)系统(1)中所述的多向振动采集模块。
该多向振动采集模块由多个加速度传感器和相匹配的传感器使能电路组成,多个加速度传感安装于所需要进行振动控制的位置与方向,以用于采集不同方位的振动加速度力信号。传感器使能电路为每个加速度传感器进行使能,提供符合加速度传感器正常工作所需要电压范围的恒流源供电,加速度传感器将所采集到的加速度力学信号转换为电学的振动模拟电压信号后,承载于恒流源直流供电电压上,传输给下一级。
(3)系统(1)中所述的信号处理模块。
该信号处理模块由多个并行的信号处理单元、一个多路选通单元和一个模数转换单元组成。信号处理模块的主要作用是将多向振动采集模块传输来的多路振动模拟电压信号,最终转换为一路数据信息传输给主控单元。
前级多向振动采集模块传来的每路加速度电压模拟信号,会通过一路信号处理单元后,实现直流分量的消除与干扰的抑制,并通过幅值调整电路实现幅值的放大和直流偏置的调整,从而将振动模拟电压信号的电平范围转换为符合后续模数转换电路所允许的电压采集范围。将每一路信号处理单元输出的信号传输给一路多路选通单元,多路选通单元通过轮询的方式依次顺序选通各路信号处理单元传输来的信号,实现多路振动模拟电压信号的合并转换,生成一路合并振动模拟电压信号传输给模数转换单元,模数转换单元通过轮询采样,将合并振动模拟电压信号转换为可以被主控模块的接受的数字信号,从而实现主控模块对于多路振动信号的信息采集。
(4)系统(1)中所述的主控模块。
所述的主控模块的主要作用是对传输而来的各路振动信息进行分析计算,然后结合算法,自适应的生成对应的多向减振控制信号,从而能够控制后一级的振动抑制模块有效的抑制各个方位的振动。
该模块以处理器为核心,配合各类外围电路,对从模数转换器得到的各路振动信息进行综合处理,使用自适应高阶机械制冷机振动控制算法对于每个方位的振动进行多个阶次频率的自适应迭代计算,从而生成对应方位的控制信号,用以控制后续的振动抑制模块,实现振动的自适应高阶抑制。
(5)系统(1)中所述的振动抑制模块。
所述的振动抑制模块,由多路并列的驱动电路连接减振器构成。各个减振器多为小型电机,每个减震器与相对应的振动传感器安于同一方位,以生成反向作用力来抵消该方位的振动力。来自于主控模块的控制信号,控制逆变电路驱动器,生成可以驱动减振器功率驱动信号,驱动对应的减振器产生振动力以抑制振动,抑制后的振动信号会重新被振动传感器所采集,形成一个反馈。
(6)系统(1)中所述的供电模块。
所述的模块的主要作用是,用于将外部给予的同一供电进行转化,转化为符合其他四个模块需求的供电电压,同时供电模块还会提供稳压与噪声抑制的功能,以保证干扰不会影响到各个模块的正常工作。
(7)信号处理模块(3)中所述的信号处理单元。
所述的信号处理单元包括直流分量隔离电路、仪表放大电路、低通滤波电路、高通滤波电路、幅值调整电路五个部分组成。这五个电路按照直流分量隔离电路、仪表放大电路、低通滤波电路、高通滤波电路、幅值调整电路的顺序串行级联,信号从直流分量隔离电路进入,从幅值调整电路输出,生成调整好的模拟信号。
直流分量隔离电路,通常采用电容隔直的方法,因最终所需要的振动信号仅为高频次交流信号,所以会将传感器返回的直流分量给去除掉。仪表放大电路,为采用仪表放大器构建的放大电路,可以将振动传感器的产生的mV级别的微小信号,精确地放大到至所需的电压范围。低通滤波器和高通滤波器,通常采用二阶及以上的有源滤波方式,从而去除掉振动模拟电压信号中的不需要的频段,仅保留需要抑制的振动频段的频率范围。幅值调整电路,通过对经过高通滤波与低通滤波之后的模拟信号,进行幅值放大,与偏置调整,使得最终整个工作过程中振动电压信号的幅值范围处于模数转换电路的可采集的范围之内,并尽可能的接近这个范围。
3.有益效果
(1)本发明提出了一种多方位高阶自适应机械制冷机振动控制系统。相比于传统的机械制冷机振动控制系统,摆脱了减振方位与路数的制约,能够有效的同时对于机械制冷机平台的多个方位实现有效的自适应高阶振动抑制。系统的减振性能达到国际先进水平,符合空间应用的标准。
(2)本文提出多方位高阶自适应振动控制系统具有广泛的应用空间。不仅可应用于斯特林、脉管等机械制冷机压缩机的多方位高阶自适应主动减振,还能够有类似振动和噪声特征的电机、车辆、空调、管道等减振消噪问题。
附图说明
图1为本发明一个实施例的多方位高阶自适应机械制冷机振动控制系统。
图2为本发明一个实施例的系统中的振动采集模块示意图。
图3为本发明一个实施例的系统中的信号处理模块示意图。
图4为本发明一个实施例的系统中的信号处理模块的信号处理单元示意图。
图5为本发明一个实施例的系统中的振动抑制模块示意图。
图6为本发明一个实施例的减振效果示意图。其中图(a)为方向1减振前的5阶振动加速度信号;其中图(b)为方向2减振前的5阶振动加速度信号;其中图(c)为方向3减振前的5阶振动加速度信号;其中图(d)为方向1减振后的5阶振动加速度信号;其中图(e)为方向2减振后的5阶振动加速度信号;其中图(f)为方向3减振后的5阶振动加速度信号。
具体实施方式
以下结合附图对本发明的具体内容作进一步说明,但本发明的具体实施方式不限于此。凡依本发明的创造精神及特征、模式和实现本发明功能的都在本发明的保护范围之内。
参照图1所示,本发明通过以下技术方案实现:一种机械制冷机的多方位高阶自适应振动控制系统,该系统由五个模块构成:
包括多向振动采集模块、信号处理模块、主控模块、振动抑制模块和供电模块五个模块组成。
(1)参照图2所示,多向振动采集模块的振动传感器使用M352C65ICP,分别安装于机械制冷机安装平台的三个方位,从而实现这三个方位振动信息的采集。传感器使能电路采用恒流源器件LM334,提供符合振动传感器 M352C65ICP使能所需要的恒流源。
(2)参照图3所示,信号处理模块其中包括三路信号处理单元,分别对应传感器传来的三个方位振动模拟信号进行处理,将处理后的各路调理振动信号传递给多路选通单元。多路选通单元采用ADG526为核心芯片,通过控制器控制有序对三路振动信号进行轮询选通,生成一路信号传输给模数转换模块。模数转换模块采用AD976对信号进行采集,转化为数字信息传输给后续的主控模块。参照图4所示,每路信号处理单元,采用电容来搭建直流隔离电路,去除信号中的直流分量;采用AD620仪表放大器搭建仪表放大电路,对微弱信号进行放大;采用精密运算放大器分别搭建二阶低通有源滤波器电路和二阶高通有源滤波电路,对信号进行高通和低通滤波;最后通过运放电路将信号幅值调整至-10V~10V,传输给多路选通单元。
(3)主控模块,主要采用DSP作为控制核心,辅助以相对应的外围电路,DSP接收信号处理模块最终传来的数据信息,使用高阶自适应振动控制算法,对各路振动信号进行分析运算,并迭代生成相应的控制信号,该控制信号为 PWM信号形式。
(4)振动抑制模块,其驱动电路采用以DRV8837为核心的驱动全桥,在接收到主控模块传输来的控制信号后,生成驱动信号以驱动相对应连接的减振器。每个减振器都安装于与之相对应的振动传感器旁边,对该方位的振动进行特征化抑制
(5)供电模块,通过采用多个隔离型DCDC,将外部提供的42V直流供电分别转化为两路±12V,一路+28V,以及一路+5V,进行滤波后,传输给其余各个所需模块。
最终如图6所示,实测证明,本系统在针对机械制冷机安装面的多方位振动进行主动控制时,能实现各个方位点的各阶次振动有效地收敛抑制。
- 一种机械制冷机的多方位高阶自适应振动控制系统
- 一种机械制冷机自适应高阶振动主动控制方法