一种垂直起降固定翼飞行器
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及一种飞行器,具体涉及一种垂直起降固定翼飞行器。
背景技术
飞行器通常为两类,固定翼式和旋翼式,其中固定翼式飞行器通过气流流过机翼时在机翼上下两侧的压力差提供升力,具有载重量大、航程远、巡航速度快等优点,对应的缺点是需要较长的跑到进行滑跑起降。旋翼式飞机通过多片桨叶的高速转动来提供升力,通常可以垂直起降,使用灵活,但在载重、航程、巡航速度上有一定限制。
本发明的目的即是针对现有飞行器的上述问题,提供一种可以兼顾固定翼式飞行器和旋翼式飞行器的优点的垂直起降固定翼飞行器。
发明内容
本发明要解决的技术问题是提供一种垂直起降固定翼飞行器,通过调整板改变主动力模块的推力方向,实现飞行器的垂直起降,并同时兼顾固定翼飞行器的高航速优点。
为了解决上述技术问题,本发明提供的技术方案如下:一种垂直起降固定翼飞行器,包括机身、机翼和动力系统,所述的动力系统包括主动力模块和辅助动力模块,所述的辅助动力模块包括提供竖直推力的第一动力单元;所述的主动力模块包括调整板和至少一个第二动力单元,所述的第二动力单元设置在调整板上;所述的调整板与机身和/或机翼旋转活动连接,且所述的调整板相对于机身至少具有两个位置状态,第一位置状态下,所述的第二动力单元提供水平推力,第二位置状态下,所述的第二动力单元提供竖直推力。
起飞和降落状态下,第一动力单元工作并提供竖直向下的推力,调整板处于第二位置状态,对应的第二动力单元也提供竖直向下的推力。在第一动力单元与第二动力单元的配合下,飞行器起飞或降落。
在飞行器提升至一定高度好,调整板逐步从第二位置状态向第一位置状态转换,第二动力单元开始提供部分水平推力并推动飞行器水平运动。飞行器获得水平速度后,机翼相对于空气移动,产生向上推力,直至进入巡航状态。
巡航状态下,第一动力单元停止工作,调整板处于第一位置状态,提供飞行器巡航的动力。
本申请的飞行器,可以通过调整板在第一位置状态与第二位置状态之间的转换,实现飞行器的巡航和垂直起降,并同时兼顾固定翼飞行器的高航速优点。
作为优选,所述的机身上设有沿竖直方向延伸的升力通道,所述的第一动力单元设置在升力通道内。
作为优选,所述的升力通道靠近机身头部设置。
作为优选,所述升力通道的开口处设有可开启的盖板。
可以对第一动力单元起到保护作用,同时气动布局更合理,在巡航状态下,阻力更小,有利于高速巡航和提高续航。
作为优选,所述的第一动力单元为升力风扇。
作为优选,所述第二动力单元的数量至少为两个,所述的第二动力单元在调整板上依次并行分布。
作为优选,还包括驱动调整板相对于机身旋转的调整动力单元。
作为优选,所述的调整板设置在机身尾部;所述的第二动力单元包括壳体和旋转体,所述的壳体独自围合成气流通道,或所述的壳体与调整板共同围合成气流通道;所述的气流通道包括进气口,所述的旋转体部分或全部置于气流通道内;当调整板处于第一位置状态时,在沿气流方向上,至少其中一个第二动力单元的进气口下边缘不高于机身上表面。
飞行器巡航时,机身表面形成附面层,附面层会增大飞行器的飞行阻力。将第二动力单元的进气口下边缘设置成不高于机身上表面,即第二动力单元的进去区域覆盖附面层区域,部分附面层内的流体被第二动力单元吸附流动,可以有效的减小附面层厚度,从而减小飞行器的飞行阻力。另外,在沿飞机飞行方向上,附面层厚度从前向后会逐渐增大,将第二动力单元设置在机身尾部,可以从尾部打破附面层的发展,减少了由于附面层产生的尾迹阻力。
作为优选,所述的机翼包括主翼和副翼,其中所述的副翼为鸭翼。
作为优选,还包括控制模块,所述的控制模块包括控制器、高度传感器和速度传感器;起飞模式下,调整板首先调整至第二位置状态,第一动力单元和第二动力单元工作,飞行器的高度增大;高度传感器用于监控飞行器的高度,并反馈给控制器,当飞行器的高度增大到预设值时,控制器控制调整板开始逐步从第二位置状态向第一位置状态调整,此时飞行器的水平速度开始增大;速度传感器用于监控飞行器的水平速度,当飞行器的水平速度增大至预设值,控制器控制调整板调整至第一位置状态,第一动力单元停止工作。
附图说明
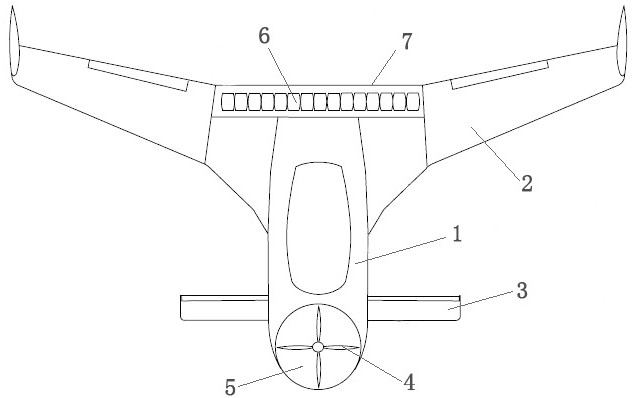
图1为本实施例垂直起降固定翼飞行器的结构示意图;
图2为本实施例垂直起降固定翼飞行器中第二动力单元处于第一位置状态下的局部示意图;
图3为本实施例垂直起降固定翼飞行器中第二动力单元下的局部示意图;
图4为本实施例垂直起降固定翼飞行器中第二动力单元处于位置变换状态下的局部示意图;
图5为本实施例垂直起降固定翼飞行器中第二动力单元附面层进气的局部示意图;。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例
如图1所示,一种垂直起降固定翼飞行器,包括机身1、机翼和动力系统,所述的机翼包括主翼2和副翼3,其中所述的副翼3为鸭翼。
如图1-图5所示,所述的动力系统包括主动力模块和辅助动力模块,所述的主动力模块包括调整板7和至少一个第二动力单元6,所述的第二动力单元6设置在调整板7上。
如图2-图4所示,所述的调整板7与机身1和/或机翼旋转活动连接,还包括驱动调整板7相对于机身1旋转的调整动力单元。所述的调整板7相对于机身1至少具有两个位置状态,如图2所示,第一位置状态下,所述的第二动力单元6提供水平推力;如图4所示,第二位置状态下,所述的第二动力单元6提供竖直推力。所述第二动力单元6的数量至少为两个,所述的第二动力单元6在调整板7上依次并行分布。
如图1所示,所述的机身1上靠近机身1头部设有沿竖直方向延伸的升力通道5,所述的辅助动力模块包括提供竖直推力的第一动力单元4,所述的第一动力单元4设置在升力通道5内。所述升力通道5的开口处设有可开启的盖板。可以对第一动力单元4起到保护作用,同时气动布局更合理,在巡航状态下,阻力更小,有利于高速巡航和提高续航。所述的第一动力单元4优选为升力风扇。
还包括控制模块,所述的控制模块包括控制器、高度传感器和速度传感器;起飞模式下,调整板7首先调整至第二位置状态,第一动力单元4和第二动力单元6工作,飞行器的高度增大;高度传感器用于监控飞行器的高度,并反馈给控制器,当飞行器的高度增大到预设值时,控制器控制调整板7开始逐步从第二位置状态向第一位置状态调整,此时飞行器的水平速度开始增大;速度传感器用于监控飞行器的水平速度,当飞行器的水平速度增大至预设值,控制器控制调整板7调整至第一位置状态,第一动力单元4停止工作。
起飞和降落状态下,第一动力单元4工作并提供竖直向下的推力,调整板7处于第二位置状态,对应的第二动力单元6也提供竖直向下的推力。在第一动力单元4与第二动力单元6的配合下,飞行器起飞或降落。
在飞行器提升至一定高度好,调整板7逐步从第二位置状态向第一位置状态转换,第二动力单元6开始提供部分水平推力并推动飞行器水平运动。飞行器获得水平速度后,机翼相对于空气移动,产生向上推力,直至进入巡航状态。
巡航状态下,第一动力单元4停止工作,调整板7处于第一位置状态,提供飞行器巡航的动力。
本申请的飞行器,可以通过调整板7在第一位置状态与第二位置状态之间的转换,实现飞行器的巡航和垂直起降,并同时兼顾固定翼飞行器的高航速优点。
进一步的,如图1-图5所示,所述的调整板7设置在机身1尾部;所述的第二动力单元6包括壳体和旋转体,所述的壳体独自围合成气流通道,或所述的壳体与调整板7共同围合成气流通道;所述的气流通道包括进气口,所述的旋转体部分或全部置于气流通道内;当调整板7处于第一位置状态时,在沿气流方向上,至少其中一个第二动力单元6的进气口下边缘不高于机身1上表面。
如图5所示,飞行器巡航时,机身1表面形成附面层8,附面层8会增大飞行器的飞行阻力。将第二动力单元6的进气口下边缘设置成不高于机身1上表面,即第二动力单元6的进去区域覆盖附面层区域,部分附面层内的流体被第二动力单元6吸附流动,可以有效的减小附面层厚度,从而减小飞行器的飞行阻力。另外,在沿飞机飞行方向上,附面层厚度从前向后会逐渐增大,将第二动力单元6设置在机身1尾部,可以从尾部打破附面层的发展,减少了由于附面层产生的尾迹阻力。
众所周知,飞行器表面形成的附面层内气体流速基本为零,附面层内的气体一旦被吸入常规航空发动机有导致发动机停车的风险,这是贯穿航空动力学的一大难题。因此,在此特别说明,本申请飞行器所采用的第二动力单元6采用外部动力,例如外部供电的风扇等。从第二动力单元6进气口进入的附面层气体不会进入燃烧室内,避免因附面层吸气造成发动机停车。
总之,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种可驮载固定翼飞机垂直起降的飞行器、驮载方法、垂直起飞的方法及垂直降落的方法
- 一种垂直起降固定翼飞行器