一种教学教育机器人
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及智能机器人技术领域,尤其涉及一种教学教育机器人。
背景技术
机器人随着科技的进步和时代的发展,逐渐由工业生产走向了人们的生活,由此适用于教学的教育机器人应运而生。
但是现在的教育机器人不便于对显示屏的高度进行调整,并且不便于对显示屏进行保护,基于此,本发明提出一种教学教育机器人。
发明内容
本发明的目的是为了解决现有技术中机器人不便于对显示屏进行保护的问题,而提出的一种教学教育机器人。
为了实现上述目的,本发明采用了如下技术方案:
一种教学教育机器人,包括机体,所述机体的底壁设置有四个相互对称的万向轮,所述机体的顶侧壁焊接有固定板,所述固定板的底壁固定设置有风扇本体,所述机体的侧壁开设有放置腔,所述机体的内部对称开设有两个空腔,所述机体的侧壁对称焊接有两个支撑板,两个所述支撑板与空腔一一对应,所述放置腔远离开口的一端开设有凹槽,所述凹槽连接有调整装置,所述支撑板连接有保护装置。
在上述的一种教学教育机器人中,所述调整装置包括弹簧,所述弹簧与凹槽远离出口的一端焊接固定,所述弹簧的另一端焊接有齿条,所述齿条与凹槽的顶壁滑动连接,所述齿条啮合有齿轮,所述齿轮的转动中心处焊接有转动轴,所述齿条焊接有滑轨,所述放置腔对称开设有两个滑动槽,其中一个所述滑动槽滑动连接有支撑箱,另一个所述滑动槽滑动连接有滑动块,所述支撑箱内固定设置有电机,所述电机的输出轴贯穿支撑箱的底壁并焊接有第一螺纹杆,所述第一螺纹杆的另一端与滑动块的顶壁转动连接,所述第一螺纹杆螺纹连接有螺纹块,所述螺纹块的侧壁分别固定设置有固定杆与电动伸缩杆,所述固定杆的另一端转动连接有显示屏,所述电动伸缩杆的自由端与显示屏的侧壁转动连接,所述转动轴连接有限位机构。
在上述的一种教学教育机器人中,所述限位机构包括第一转动盘,所述转动轴贯穿放置腔的侧壁与第一转动盘焊接固定,所述第一转动盘焊接有第一把手,所述第一转动盘周向阵列开设有多个限位槽,所述机体的侧壁固定设置有固定架,所述固定架转动连接有限位板,所述限位板位于转动轴的上方并且底端形状与限位槽的形状相配合。
在上述的一种教学教育机器人中,所述保护装置包括两个第二螺纹杆,两个所述第二螺纹杆分别与两个所述支撑板转动连接,所述第二螺纹杆螺纹连接有遮挡块,两个所述第二螺纹杆均焊接有第一同步轮,两个所述第一同步轮均套设有同步带,两个所述同步带均套设有第二同步轮,两个所述第二同步轮共同焊接有同步轴,所述机体开设有机械腔,所述同步轴贯穿机械腔并焊接有第一锥齿轮,所述第一锥齿轮啮合连接有第二锥齿轮,所述第二锥齿轮的转动中心处焊接有作用轴,所述作用轴贯穿机械腔的侧壁并焊接有第二转动盘,所述第二转动盘焊接有第二把手。
在上述的一种教学教育机器人中,所述同步轴的底端与机械腔的底壁转动连接,两个所述第二同步轮分别位于两个所述空腔内部,两个所述遮挡块相对应设置,两个所述遮挡块的尺寸之和与放置腔的尺寸相匹配。
在上述的一种教学教育机器人中,所述遮挡块与机体的侧壁滑动连接,所述遮挡块内部开设有螺纹槽,所述遮挡块通过螺纹槽与第二螺纹杆螺纹连接,所述转动轴与放置腔的侧壁转动连接。
在上述的一种教学教育机器人中,所述滑轨与螺纹块的侧壁滑动连接,所述显示屏的尺寸小于放置腔的尺寸,所述电动伸缩杆位于固定杆的正上方,所述机械腔位于两个所述空腔的下方。
与现有的技术相比,本发明优点在于:
1:通过设置电机、螺纹杆与电动伸缩杆等结构,使得通过启动电机带动第一螺纹杆进行转动,从而使得第一螺纹杆带动螺纹块进行移动,从而带动显示屏上移,并且通过启动电动伸缩杆使得电动伸缩杆带动显示屏进行转动,从而使得显示屏可以根据学习者的需要进行高度与角度的调整,可以更好的满足使用者的需求。
2:通过设置限位板、第一转动盘与第一把手等结构,通过转动第一把手带动显示屏移动至合适的位置,当移动至合适的位置后,通过将限位板与其相对应的限位槽进行匹配,从而限制了转动轴的转动,使得显示屏在较为工作时可以保持稳定。
3:通过设置第二把手、第一锥齿轮与第二锥齿轮等结构,使得当显示屏在使用完毕后,通过转动第二把手,使得在第一锥齿轮与第二锥齿轮啮合的作用下,同步轴进行转动,从而在同步带的作用下,使得第二螺纹杆转动带动遮挡块相互靠近进行移动,从而将放置腔进行封堵,从而对显示屏进行保护。
4:通过设置风扇本体,使得夏季学习者在学习时,风扇本体可对学习者进行降温,使得学习者感到舒适,通过设置万向轮,使得装置便于进行移动,便于学习者使用。
附图说明
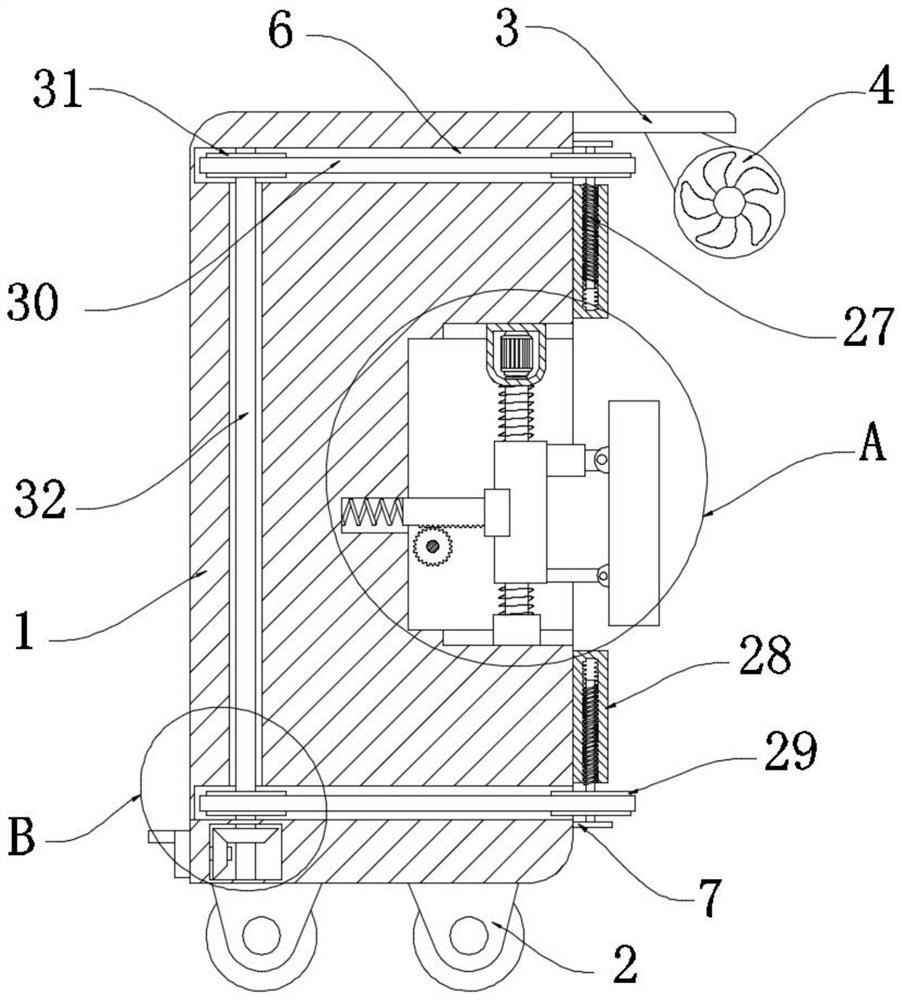
图1为本发明提出的一种教学教育机器人的结构示意图;
图2为本发明提出的一种教学教育机器人中A部分的放大示意图;
图3为本发明提出的一种教学教育机器人中B部分的放大示意图;
图4为本发明提出的一种教学教育机器人中的正视图。
图中:1机体、2万向轮、3固定板、4风扇本体、5放置腔、6空腔、7支撑板、8凹槽、9滑动槽、10弹簧、11齿条、12齿轮、13转动轴、14滑轨、15支撑箱、16滑动块、17电机、18第一螺纹杆、19螺纹块、20固定杆、21电动伸缩杆、22显示屏、23第一转动盘、24第一把手、25限位槽、26限位板、27第二螺纹杆、28遮挡块、29第一同步轮、30同步带、31第二同步轮、32同步轴、33机械腔、34第一锥齿轮、35第二锥齿轮、36作用轴、37第二转动盘、38第二把手。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1-4,一种教学教育机器人,包括机体1,机体1的底壁设置有四个相互对称的万向轮2,机体1的顶侧壁焊接有固定板3,固定板3的底壁固定设置有风扇本体4,使得夏季学习者在学习时,风扇本体4可对学习者进行降温,使得学习者感到舒适,机体1的侧壁开设有放置腔5,机体1的内部对称开设有两个空腔6,机体1的侧壁对称焊接有两个支撑板7,两个支撑板7与空腔6一一对应,放置腔5远离开口的一端开设有凹槽8,凹槽8连接有调整装置,支撑板7连接有保护装置。
调整装置包括弹簧10,弹簧10与凹槽8远离出口的一端焊接固定,弹簧10的另一端焊接有齿条11,齿条11与凹槽8的顶壁滑动连接,齿条11啮合有齿轮12,齿轮12的转动中心处焊接有转动轴13,齿条11焊接有滑轨14,放置腔5对称开设有两个滑动槽9,其中一个滑动槽9滑动连接有支撑箱15,另一个滑动槽9滑动连接有滑动块16,支撑箱15内固定设置有电机17,电机17的输出轴贯穿支撑箱15的底壁并焊接有第一螺纹杆18,第一螺纹杆18的另一端与滑动块16的顶壁转动连接,第一螺纹杆18螺纹连接有螺纹块19,螺纹块19的侧壁分别固定设置有固定杆20与电动伸缩杆21,固定杆20的另一端转动连接有显示屏22,电动伸缩杆21的自由端与显示屏22的侧壁转动连接,转动轴13连接有限位机构,通过启动电机17带动第一螺纹杆18进行转动,从而使得第一螺纹杆18带动螺纹块19进行移动,从而带动显示屏22上移,并且通过启动电动伸缩杆21使得电动伸缩杆21带动显示屏22进行转动,从而使得显示屏22可以根据学习者的需要进行高度与角度的调整,可以更好的满足使用者的需求。
限位机构包括第一转动盘23,转动轴13贯穿放置腔5的侧壁与第一转动盘23焊接固定,第一转动盘23焊接有第一把手24,第一转动盘23周向阵列开设有多个限位槽25,机体1的侧壁固定设置有固定架,固定架转动连接有限位板26,限位板26位于转动轴13的上方并且底端形状与限位槽25的形状相配合,转动第一把手24带动显示屏22移动至合适的位置,当移动至合适的位置后,通过将限位板26与其相对应的限位槽25进行匹配,从而限制了转动轴13的转动,使得显示屏22在工作时可以保持稳定。
保护装置包括两个第二螺纹杆27,两个第二螺纹杆27分别与两个支撑板7转动连接,第二螺纹杆27螺纹连接有遮挡块28,两个第二螺纹杆27均焊接有第一同步轮29,两个第一同步轮29均套设有同步带30,两个同步带30均套设有第二同步轮31,两个第二同步轮31共同焊接有同步轴32,机体1开设有机械腔33,同步轴32贯穿机械腔33并焊接有第一锥齿轮34,第一锥齿轮34啮合连接有第二锥齿轮35,第二锥齿轮35的转动中心处焊接有作用轴36,作用轴36贯穿机械腔33的侧壁并焊接有第二转动盘37,第二转动盘37焊接有第二把手38,当显示屏22在使用完毕后,通过转动第二把手38,使得在第一锥齿轮34与第二锥齿轮35啮合的作用下,同步轴32进行转动,从而在同步带30的作用下,使得第二螺纹杆27转动带动遮挡块28相互靠近进行移动,从而将放置腔5进行封堵,从而对显示屏22进行保护。
同步轴32的底端与机械腔33的底壁转动连接,两个第二同步轮31分别位于两个空腔6内部,两个遮挡块28相对应设置,两个遮挡块28的尺寸之和与放置腔5的尺寸相匹配,遮挡块28与机体1的侧壁滑动连接,遮挡块28内部开设有螺纹槽,遮挡块28通过螺纹槽与第二螺纹杆27螺纹连接,转动轴13与放置腔5的侧壁转动连接,滑轨14与螺纹块19的侧壁滑动连接,显示屏22的尺寸小于放置腔5的尺寸,电动伸缩杆21位于固定杆20的正上方,机械腔33位于两个空腔6的下方。
本发明中,当需要使用该装置时,首先通过转动第二把手38,使得第二转动盘37通过作用轴36带动第一锥齿轮34进行转动,在与第二锥齿轮35啮合的作用下,同步轴32带动第二同步轮31进行转动,在同步带30的作用下,使得第一同步轮29带动第二螺纹杆27进行转动,从而使两个遮挡块28相互远离将放置腔5的腔口打开,通过转动第一把手24,使得第一转动盘23带动转动轴13转动,从而使得齿轮12啮合齿条11进行移动,当齿条11带动显示屏22移动至合适的位置后,将限位板26与其相对应的限位槽25进行匹配,从而使得显示屏22的位置保持稳定。
学习者根据需要可根据自身需要对显示屏22的高度与转动角度进行调整,具体操作如下,通过启动电机17,使得电机17带动第一螺纹杆18进行转动,第一螺纹杆18在转动时将会带动螺纹块19进行移动,从而调整显示屏22的高度,通过启动电动伸缩杆21,从而将显示屏22的角度进行调整,便于工作人员进行使用。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种教学教育机器人
- 一种大学多媒体教学教育用外放装置