一种铝模板加固系统及施工方法
文献发布时间:2023-06-19 18:25:54
技术领域
本申请涉及建筑施工的领域,尤其是涉及一种铝模板加固系统及施工方法。
背景技术
在房屋建筑领域中,钢筋混凝土结构是一种使用较为广泛的建筑结构类型,在建造过程中,通常采用浇筑成型的方式形成主体部分,而建筑模板在此过程中起到提供施工效率以及减少施工成本的作用,如今,模板系统通常采用铝模板结构,其相较于传统模板而言,具有稳定性好、拼缝好以及可循环利用等优点。
目前,铝模板在搭建过程中,大致经过以下流程,首先要进行放线操作,随后绑扎竖向墙体钢筋并将定位筋焊接,紧接着将模板本体进行拼接,通过销钉将不同的模板进行固定,最后将支撑安装至模板处,检查模板安装误差,模板安装后,可在模板围设形成的空间内浇筑混凝土,实现对建筑成型。
针对上述中的相关技术,目前,铝模板系统在实际使用过程中仍然会存在部分问题,比如部分铝模板在设计过程中或实际使用过程中出现错误,导致模板的支撑力不足,进而产生失稳爆模的情形,而此时难以再进行临时支护或补救,铝模板在实际使用过程中的稳固性还具有改进提升空间。
发明内容
为了对增强铝模板的装配稳定性,进而可对失稳的铝模板进行加固及补强,本申请提供一种铝模板加固系统及施工方法。
第一方面,本申请提供的一种铝模板加固系统采用如下的技术方案:
一种铝模板加固系统,包括架体,固定安装于地板上;夹持机构,至少为两组,分别活动设于架体上,可对相邻两块铝模板的边缘进行夹持固定,多组所述夹持机构沿着两块相邻铝模板的边缘依次间隔设置;动力输入机构,设于所述架体上,用于输入动力;以及设于所述架体上的传动机构,所述传动机构分别与所述动力输入机构以及多组所述夹持机构相连接,用于将动力自所述动力输入机构处分流并传输至多组所述夹持机构中,以使多组所述夹持机构同步启动夹持动作。
通过采用上述技术方案,在铝模板失稳的情景下,可将架体固定在地板上,此时启动动力输入机构,动力输入机构可通过传动机构将动力传输至若干组夹持机构中,若干组夹持机构通过夹持的方式沿着两块相邻铝模板的边缘位置进行多点夹持,对铝模板的连接处进行加固,铝模板的装配稳定性得到提升。
优选的,所述夹持机构包括驱动盘,转动安装于架体上,一侧表面具有第一螺旋齿,所述驱动盘与所述传动机构相连,所述传动机构用于驱动所述驱动盘转动;至少两块主夹臂,所述主夹臂分别滑动安装于所述架体上,通过所述第一螺旋齿啮合于所述驱动盘,并分别靠近所述驱动盘周缘的相背两侧,两块所述主夹臂用于夹持两块相邻铝模板的边缘。
通过采用上述技术方案,驱动盘在转动的过程中,可带动主夹臂在架体滑移,在此过程中,随着驱动盘转动方向的改变,两个主夹臂可相互靠近或远离,在两个主夹臂相互靠近的过程中,可将两块相邻铝模板的边缘进行夹持,从而起到加固铝模板的作用。
优选的,所述夹持机构还包括至少两个副夹臂,所述驱动盘背对所述第一螺旋齿的一侧表面具有第二螺旋齿,所述副夹臂分别滑动安装于所述架体,所述副夹臂通过所述第二螺旋齿啮合与所述驱动盘,多组所述副夹臂分别靠近所述驱动盘周缘的相背两侧,多组所述副夹臂用于分别扣合在位于两块相邻铝模板相背两侧的另外两块铝模板的边缘处。
通过采用上述技术方案,副夹臂扣合在另外两块铝模板处,一方面可以将两块位于外侧的铝模板朝向主夹臂所夹持的两块铝模板处夹紧,铝模板系统的整体夹持稳定性得以提升,此外,副夹臂可进一步利用其余铝模板将加固系统自身加固,支护效果得到进一步提升。
优选的,所述传动机构包括主传动部,与所述动力输入机构相连;子传动部,与所述夹持机构的设置数量相适配,分别与所述主传动部以及所述夹持机构连接,用于将主传动部内的扭矩传递至所述夹持机构处。
通过采用上述技术方案,动力首先传输至主传动部处,随后通过多组子传动部实现动力分流,结构合理且实用。
优选的,主传动部包括主传动轴、第一主锥齿轮以及第二主锥齿轮,所述主传动轴转动安装于所述架体并与所述动力输入机构连接,动力输入机构用于驱动所述主传动轴转动,所述第一主锥齿轮固定安装于所述主传动轴,所述第二主锥齿轮固定安装于所述子传动部,所述子传动部转动安装于所述架体。
通过采用上述技术方案,动力输入机构驱动主传动轴转动,主传动轴转动的过程中带动第一主锥齿轮转动进而带动第二主锥齿轮转动,第二主锥齿轮将动力分流至夹持机构处,动力传输快捷稳定。
优选的,所述子传动部包括子传动轴以及直齿轮,所述子传动轴与所述第二主锥齿轮固定连接,所述直齿轮固定连接于所述子传动轴,所述夹持机构处具有齿圈,所述直齿轮与所述齿圈相啮合。
通过采用上述技术方案,第二主锥齿轮处的动力可通过子传动轴传递至直齿轮处,直齿轮则驱动齿圈转动,实现将动力分流至夹持机构中,动力传输快捷稳定。
优选的,所述动力输入机构包括电机、蜗杆以及蜗轮,所述电机固定安装于架体,所述蜗杆转动安装于架体,并且所述蜗杆的一端与所述电机的输出轴连接,所述蜗轮固定安装于所述传动机构上蜗杆与所述蜗轮相啮合。
通过采用上述技术方案,蜗轮与蜗杆可增大扭矩,加以夹持机构的夹持力得以提升,同时,蜗轮与蜗杆还可对传动机构以及夹持机构提供自锁功能,以减少传动机构松动而导致对夹持机构夹持稳定性的影响,夹持机构的夹持稳定性得到进一步提升。
优选的,所述架体包括锚钉、底座、安装座以及斜撑,所述锚钉贯穿所述底座,所述底座经由所述锚钉固定于地板处,所述安装座固定安装于底座顶部,所述夹持机构、所述动力输入机构以及所述传动机构分别设置于所述安装座处,所述斜撑分别与所述锚钉以及所述安装座固定连接。
通过采用上述技术方案,底座、安装座以及斜撑三者形成三角支撑结构,结构受力强度高,同时,锚钉将底座固定安装于地板处,实现对加固系统进行进一步锚固,加固效果得到进一步提升。
优选的,还包括扣合件,所述扣合件用于固定安装于铝模板,所述扣合件上具有供所述主夹臂或所述副夹臂插接配合的扣合槽。
通过采用上述技术方案,扣合件可为主夹臂或副夹臂提供夹持时的施力点,如此有利于将铝模板进行夹持固定,加固系统加固时的稳定性得到进一步提升。
第二方面,本申请提供的一种铝模板加固施工方法采用如下的技术方案:
一种铝模板加固施工方法,包括以下步骤:
S1:检查铝模板,记录易爆模处;
S2:将扣合件固定安装于模板上;
S3:将架体放置于地板上,并将主夹臂或副夹臂对准;
S4:启动动力输入机构,直至主夹臂以及副夹臂插接至扣合件内,此时停止启动动力输入机构;
S5:将锚钉穿过底座并固定安装于地板上。
通过采用上述技术方案,安装方便快捷,可有效对铝模板进行加固,操作简易。
综上所述,本申请包括以下至少一种有益技术效果:
1、通过启动动力输入机构,动力输入机构输出动力,并通过传动机构将动力传输至若干组夹持机构中,若干组夹持机构通过夹持的方式沿着两块相邻铝模板的边缘位置进行多点夹持,对铝模板的连接处进行加固,铝模板的装配稳定性最终得到提升;
2、主夹臂起到将相邻两块铝模板进行夹持固定的作用,与此同时,副夹臂可将其余模板朝向主夹臂所夹持固定的两块铝模板进行夹持加固,同时还利用副夹臂将铝模板进行整体受力关联,加固系统安装时的稳定性得到进一步提升;
3、主夹臂与副夹臂两者在转盘的驱动下,可同步将铝模板进行夹持,高效且快捷。
附图说明
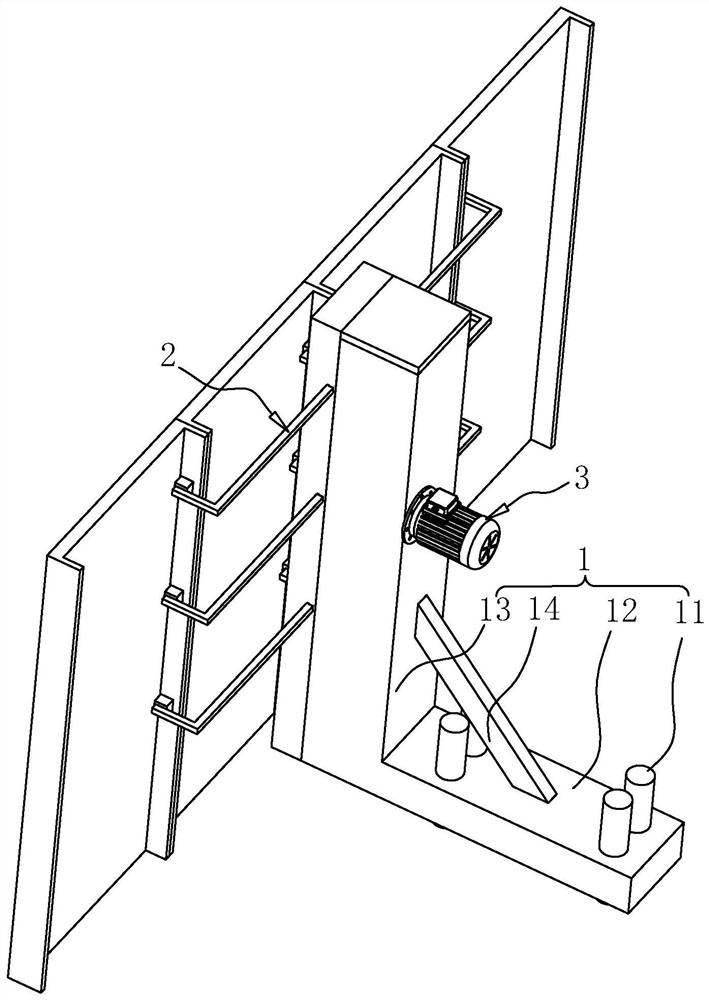
图1是本申请一较佳实施例中铝模板加固系统的结构示意图。
图2是本申请一较佳实施例中夹持机构、动力输入机构以及传动机构的结构示意图。
图3是本申请一较佳实施例中夹持机构的结构示意图。
图4是本申请一较佳实施例中夹持机构的装配关系示意图。
图5是本申请一较佳实施例中副夹臂与扣合件的结构示意图。
附图标记说明:
1、架体;11、锚钉;12、底座;13、安装座;14、斜撑;2、夹持机构;21、驱动盘;211、第一螺旋齿;212、第二螺旋齿;22、主夹臂;221、第一咬合齿;23、副夹臂;231、第二咬合齿;24、齿圈;3、动力输入机构;31、电机;32、蜗杆;33、蜗轮;4、传动机构;41、主传动部;411、主传动轴;412、第一主锥齿轮;413、第二主锥齿轮;42、子传动部;421、子传动轴;422、直齿轮;5、扣合件;51、扣合槽。
具体实施方式
以下结合附图1-5对本申请作进一步详细说明。
本申请实施例公开一种铝模板加固系统,用于在铝模板存在破裂可能性时进行加固作业,在本实施例中,铝模板选用为常规结构铝模板,其主要包括板状的本体,本体在水平方向上的相背两侧分别具有朝向一侧翻折的翻边结构,在铝模板的常规安装过程中,首先可将两块相邻铝模板的翻边叠合,随后将销钉打入两块铝模板的翻边位置处,实现将铝模板进行固定,然后在实际施工过程中,因实际施工过程中的装配情景以及使用需求存在不同,当模内的混凝土压力过大时,容易导致浇筑压力过大,混凝土所带来的压力会导致混凝土从两块铝模板的边缘位置处撑开,基于此,通过采用铝模板加固系统对铝模板的接缝处进行加固,在此,铝模板的具体安装方式在此不再赘述。
参照图1和图2,为实现对铝模板进行加固作业,该系统主要包括架体1、夹持机构2、动力输入机构3以及传动机构4。
其中,架体1固定安装于地板上,夹持机构2、动力输入机构3以及传动机构4安装于架体1处,架体1为各机构起到支撑作用,动力输入机构3与传动机构4连接,传动机构4则与夹持机构2连接,动力输入机构3通过传动机构4传递至夹持机构2处,夹持机构2则用于将相邻两块铝模板之间相互抵接的边缘处进行夹持,以提升铝模板之间的连接强度,起到加固的作用。
为实现对各机构提供稳固的支撑,具体的,架体1包括锚钉11、底座12、安装座13以及斜撑14,其中,底座12在本实施例中呈矩形板状,底座12沿水平方向放置于地板处,底座12上贯穿设置有若干安装孔,安装孔的具体设置数量可依据实际情况作对应调整,在此不作限制;锚钉11用于将底座12固定安装于地板处,具体的,将锚钉11通过安装孔贯穿底座12,并固定于地板处,实现底座12的固定安装。
安装座13固定安装于底座12顶部,在本实施例中,安装座13呈立柱状,安装座13的内部中空设置,如此有利于将夹持机构2、动力输入机构3以及传动机构4设置于安装座13处,同时,斜撑14的两端分别与锚钉11以及安装座13固定连接;此时,安装座13、底座12以及斜撑14形成受力强度较好的三角结构,并且安装座13、底座12以及斜撑14三者可一体连接,以满足结构的受力强度。
参照图2,动力输入机构3主要用于在传动机构4处输入扭矩,通过扭矩驱动夹持机构2运动。
具体的,动力输入机构3包括电机31、蜗杆32以及蜗轮33,电机31固定安装于架体1的安装座13处,并位于安装座13背对铝模板的一侧,电机31的输出轴水平设置,电机31的输出轴伸入至安装座13内;蜗杆32转动安装于架体1处,其中,蜗杆32沿水平方向设置,蜗杆32的一端通过轴承转动安装于安装座13处,蜗杆32的另一端则与电机31的输出轴通过联轴器实现连接,此时,启动电机31,电机31可驱动蜗杆32实现转动;蜗轮33固定安装于传动机构4上,蜗杆32与蜗轮33相啮合,此时,在蜗杆32转动的过程中,通过蜗轮33蜗杆32啮合,可增大扭矩输出时的扭矩,满足夹持过程中的力度需求,并且,蜗轮33与蜗杆32还可对传动机构4以及夹持机构2提供自锁功能,动力传输的稳定得到进一步提升。
进一步地,为提升对铝模板的加固稳定性,夹持机构2的设置数量至少为两组,比如可以为三组、四组或者五组等,在本实施例中选用三组以作示例,多组夹持机构2分别活动设于架体1上,并且沿着两块相邻铝模板的边缘依次间隔设置,传动机构4的目的主要是为了将动力输入机构3所输出的动力分配到每一个夹持机构2中,以使得多组夹持机构2可对相邻两块铝模板的边缘进行多点夹持,提升夹持效果。
参照图2,传动机构4包括与动力输入机构3相连的主传动部41以及分别与主传动部41以及夹持机构2连接的子传动部42,其中,子传动部42与夹持机构2的具体设置数量相适配,在本实施例中,子传动部42的设置数量为三组,三组子传动部42分别与三组夹持机构2相连接,此时,传动机构4分别与动力输入机构3以及多组夹持机构2相连接,可将动力自动力输入机构3处分流并传输至多组夹持机构2中,以使多组夹持机构2同步启动夹持动作。
具体的,主传动部41包括主传动轴411、第一主锥齿轮412以及第二主锥齿轮413,主传动轴411转动安装于架体1的安装座13内,其中,主传动轴411竖向设置,并且主传动轴411的两端分别通过轴承转动安装于安装座13内;主传动轴411与动力输入机构3相连接,其中,蜗轮33固定安装于主传动轴411处,此时,蜗轮33在转动的过程中可带动主传动轴411转动,进而实现动力的输入。
另外,第一主锥齿轮412固定安装于主传动轴411处,同时,子传动部42转动安装于架体1,第二主锥齿轮413安装于子传动部42,并且第一主锥齿轮412与第二主锥齿轮413相啮合,此时,在第一主锥齿轮412转动的过程中,带动第二主锥齿轮413实现转动,第二主锥齿轮413将动力传输至子传动部42中。
继续参照图2,子传动部42包括子传动轴421以及直齿轮422,其中子传动轴421水平设置,子传动轴421通过轴承转动安装于架体1的安装座13处,第二主锥齿轮413固定安装于传动轴处,在第二主锥齿轮413转动的过程中,带动子传动轴421转动。同时,直齿轮422固定安装于子传动轴421处,直齿轮422与夹持机构2连接,实现将主传动部41内的扭矩动力传递至夹持机构2处,动力实现分流。
参照图3,进一步地,为实现对铝模板进行夹持加固,夹持机构2包括驱动盘21、主夹臂22以及副夹臂23。
其中,驱动盘21在本实施例中呈圆盘结构,驱动盘21转动安装于安装座13处,通常,驱动盘21处可固定安装一转轴,通过将转轴转动安装于安装座13处,实现驱动盘21的转动安装。驱动盘21的周缘位置处一体成型有驱动齿,驱动齿首尾相连,形成齿圈24结构,齿圈24与直齿轮422相啮合,此时,驱动盘21与传动机构4相连,传动机构4可驱使驱动盘21转动。
进一步地,驱动盘21的一侧表面具有第一螺旋齿211,具体的,第一螺旋齿211位于驱动盘21靠近铝模板的一侧表面处,主夹臂22的数量至少设置两块,在本实施例中,主夹臂22的数量设为两块,以用作示例;
主夹臂22在本实施例中包括依次连接的第一段、第二段以及第三段,相邻两段相互垂直,并同时沿水平放置,主夹臂22此时呈类U字形状结构,主夹臂22的第一段的上下两侧分别一体链接有滑移凸台,滑移凸台沿着主夹臂22的长度方向延伸至两端,此时主夹臂22的纵截面呈T字形状,同时,在安装座13上沿水平方向开设有供主夹臂22滑移的滑槽,滑槽的开口轮廓与主夹臂22相一致,同样为T字形结构,此时将主夹臂22的第一段滑动配至于滑槽内,实现主夹臂22在架体1上的滑动安装,主夹臂22可沿着水平方向滑动,在滑动过程中可相对于铝模板的翻边靠近或远离。
与此同时,两块主夹臂22在设置时分别靠近驱动盘21在水平方向上周缘的相背两侧,在两块铝模板对接的位置假设一竖向设置的参考平面,两块主夹臂22沿着参考平面对称设置;主夹臂22上一体连接有可与第一螺旋齿211啮合的第一咬合齿221,此时主夹臂22通过第一螺旋齿211啮合于驱动盘21,在驱动盘21转动的过程中,可驱使两块主夹臂22相互靠近或远离,在主夹臂22相互靠近的过程中可夹持两块相邻铝模板的边缘。
参照图4,副夹臂23则用于增强加固系统的锚固性,同时还能起到将铝模板进行加固的作用,具体的,副夹臂23的设置数量同样可最少设置两个,在本实施例中,副夹臂23的具体设置数量为两个以作示例;副夹臂23的结构与主夹臂22的结构类似,同样包括依次垂直相连的第一段、第二段和第三段;其中,副夹臂23同样沿水平方向放置,在安装座13上可继续开设T形滑槽,在副夹臂23的第一段处设置有滑移凸台,副夹臂23滑动配至于另一滑槽处,副夹臂23实现滑动安装于架体1。
与此同时,多组副夹臂23同样分别靠近驱动盘21周缘的相背两侧,多组副夹臂23同样沿着参考平面对称设置;并且驱动盘21背对第一螺旋齿211的一侧表面具有第二螺旋齿212,副夹臂23的第一段处一体成型有与第二螺旋齿212啮合的第二咬合齿231,此时,副夹臂23通过第二螺旋齿212啮合与驱动盘21,在驱动盘21转动的过程中,可驱使两块副夹臂23相互靠近或远离,实现夹持动作。
回看图1,副夹臂23与主夹臂22的不同之处在于,副夹臂23的第一段的长度长于主夹臂22的第一段的长度,并且副夹臂23的端部并不是对主夹臂22所夹持的两块铝模板的翻边部分进行夹持加固;此时,副夹持的端部朝向主夹臂22所夹持的两块铝模板相背的两侧边缘处延伸,并且分别扣合于其余两块铝模板的翻边位置处,需要说明的是,此处指的其余两块铝模板,其含义是分别位于主夹臂22所夹持的两块铝模板相背两侧的两块铝模板;即表明多组副夹臂23用于分别扣合在位于两块相邻铝模板相背两侧的另外两块铝模板的边缘处,此时,将副夹臂23扣合在另外两块铝模板处,一方面可以将两块位于外侧的铝模板朝向主夹臂22所夹持的两块铝模板处夹紧,铝模板系统的整体夹持稳定性得以提升,另一方面,副夹臂23可进一步利用其余铝模板将加固系统自身锚固,支护效果得到进一步提升。
进一步地,为提升主夹臂22与副夹臂23夹持时的稳定性,该加固系统还包括扣合件5,扣合件5在本实施例中呈方块状设置,扣合件5可固定安装于铝模板的翻边处,通常,可通过焊接或螺钉固定的方式装配至铝模板处;与此同时,扣合件5背对翻边的一侧自外向内凹陷设置有扣合槽51,扣合槽51用于供主夹臂22或副夹臂23插接配合,当主夹臂22或副夹臂23插入扣合槽51内时,实现扣合动作,如此有利于将铝模板进行夹持固定,加固系统加固时的稳定性得到进一步提升。
本申请实施例一种铝模板加固系统的实施原理为:在铝模板失稳的情景下,可将架体1固定在地板上,并通过启动动力输入机构3,动力输入机构3可通过传动机构4将动力传输至若干组夹持机构2中,若干组夹持机构2中的主夹臂22以及副夹臂23通过夹持的方式沿着两块相邻铝模板的边缘位置进行多点夹持,对铝模板的连接处进行加固,铝模板的装配稳定性得到提升。
本实施例还公开了一种铝模板加固施工方法,包括以下步骤:
S1:预装铝模板,将铝模板先进行整体装配,随后检查铝模板,分析并记录易爆模处。
S2:将扣合件5固定安装于铝模板,在安装过程中,可首先将架体1靠近铝模板的相应位置处,记录安装高度,以便于扣合槽51与主夹臂22与子夹持臂可对齐,在具体安装时,可通过焊接或螺钉固定的方式固定于铝模板的翻边位置处。
S3:将架体1放置于地板上,并将主夹臂22或副夹臂23对准,此时可调试动力输入机构3,以主夹臂22、副夹臂23可伸入扣合槽51内为准。
S4:启动动力输入机构3,直至全部的主夹臂22以及副夹臂23插接至扣合件5内,此时停止启动动力输入机构3。
S5:将锚钉11穿过底座12并固定安装于地板上,完成整体加固,安装方便快捷。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种便捷可调式现浇墙柱模板加固支撑结构及其施工方法
- 一种圆柱与剪力墙连接模板加固结构及其加固方法
- 一种铝模板施工支撑加固结构及其使用方法
- 一体化免开口F型卡铝模板整体加固结构施工方法