一种数学练习器组装设备
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及数学练习器组装技术领域,尤其涉及一种数学练习器组装设备。
背景技术
数学练习器为初学儿童使用的一种学具。如图1所示,该数学数学训练器一般由底座、滑杆、算珠组成;算珠穿在滑杆上,滑杆固定在底座上,一个数学练习器包括多个滑杆,每个滑杆上串有多个算珠。这种类似与算盘的练习器可增加儿童交互体验,增添儿童的学习乐趣。家长而会在学前阶段或幼儿园时期为孩子购买该类学具。
深入教育领域调查了解,数学练习器等学习用于深受家长的关注也喜爱,具有广泛的市场。数学练习器结构简单但是自动安装设备较为匮乏,组装时需要在滑杆串好算珠后与底座固定,且滑杆之间需要预设好间距。在自动组装时需要采用夹持机构抓取滑杆后串上算珠,再与底座对接固定。一般会采用多个夹爪分别进行无锁死夹持滑杆,以便于组装后的取下。但是滑杆与底座需要有过盈的插接配合以及焊接固定,夹爪对滑杆的固定力不够,容易导致其脱落。
发明内容
本发明针对现有技术中的不足,提供一种数学练习器组装设备,用于一次抓取多个滑杆并控制其间距均匀,且在调距时对滑杆加固,确保其与底座对接时的稳定。
为了解决上述技术问题,本发明通过下述技术方案得以解决滑杆与底座对接固定时,夹爪对滑杆的固定力不够,容易导致其脱落的问题
为了实现上述目的,本发明采用了如下技术方案:
一种数学练习器组装设备,包括:卡爪、滑座、机械臂;
所述卡爪用于抓取均匀分布的滑杆;
所述滑座用于和多个所述卡爪连接,控制夹紧滑杆并等距分布;
所述机械臂和所述滑座连接控制移动反正,用于安装算珠及和底座连接;
所述卡爪内部安装有固定件,用于相邻卡爪分离时对滑杆夹紧。
优选的,所述卡爪由侧壁、顶梁、腹块组成,
所述侧壁设于顶梁两侧,所述侧壁上开设卡槽,
所述腹块位于两个侧壁之间,所述腹块上设有弧槽;
所述滑杆呈U型结构,其弯折端分别卡在卡槽与弧槽与其过盈配合。
优选的,所述腹块中垂直与弧槽设有通孔,所述通孔中滑动安装限位块。
优选的,所述侧壁端面设有凹槽,所述固定件安装于凹槽内部,所述固定件可穿入通孔中与限位块连接。
优选的,所述滑座上平行设有与其转动配合的导杆和双向丝杆,
所述导杆上均匀设有多个滑块并与其滑动配合,
所述双向丝杆被多个滑块穿过,所述双向丝杆的中部光滑并套设一个滑块,其余所述滑块与双向丝杆螺纹配合。
优选的,所述滑块与卡爪连接并遮住凹槽,所述滑块中部贯穿设有转轴,所述转轴一端穿凹槽并与固定件连接,多个所述转轴通过剪式伸缩臂连接。
优选的,所述固定件包括圆柱、套杆、限位杆,所述圆柱转动凹槽中部,所述套杆套设于圆柱上,所述限位杆设于套杆的耳座上并穿入通孔内与限位块接触。
优选的,所述圆柱外侧倾斜设有环形槽,所述套杆内侧固定有穿入环形槽的凸杆。
优选的,所述转轴一端穿入圆柱内部并与其过盈配合。
优选的,所述限位杆底端呈锥形结构,所述限位块端面设有斜槽。
优选的,剪式伸缩臂由第一折叠臂和第二折叠臂组成,第一折叠臂和第二折叠臂端部转动连接,该连接端设有背向卡爪反向设有凸起,第一折叠臂一端与转轴连接固定,第二折叠臂一端与另一个转轴转动配合。第一折叠臂和第二折叠臂自身可进行伸缩,但是伸缩阻力较大,在不收外力作用时,其作为直杆正常使用。并能完成上述中剪式伸缩臂的收缩展开,并完成对转轴的旋转控制。
优选的,凸起上套接垂直于滑块移动方向的连接杆,多个连接杆的一端与推板连接,推板可通过连接杆推动凸起移动让第一折叠臂和第二折叠臂伸长。可在滑座不动情况下让转轴继续转动。
优选的,推板连接到无自锁的气推器上,在停止工作时不阻碍推板的移动。
需要说明的是,滑块和卡爪均匀分散并与底座连接后,滑杆被固定在底座上间距无法改变。导致滑块和卡爪无法回收,且滑杆无法从卡爪上取下。通过推板推动第一折叠臂和第二折叠臂让其自身伸长,此时会控制转轴持续旋转接触对限位块的锁定,可取下滑杆,并让卡爪与滑块复位。
与现有技术相比,本发明具有如下有益效果:
本发明提供一种数学练习器组装设备,用于抓取滑杆并控制其均匀分散便于和底座对接固定,并在控制滑杆分散时对其加固,提高与底座连接时的稳定性。
本发明中滑杆通过插拔的方式固定在弧槽中,利用固定件控制限位孔向弧槽中移动,完成对滑杆的加固;固定件受剪式伸缩臂控制在滑杆分散时自动对滑杆加固,让加固更加精准及时。
本发明中剪式伸缩臂不仅能能受双向丝杆和滑块的伸展控制,其自身也具备折叠功能,让实现对滑杆的解锁,让其可轻松取下。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的数学练习器整体结构示意图;
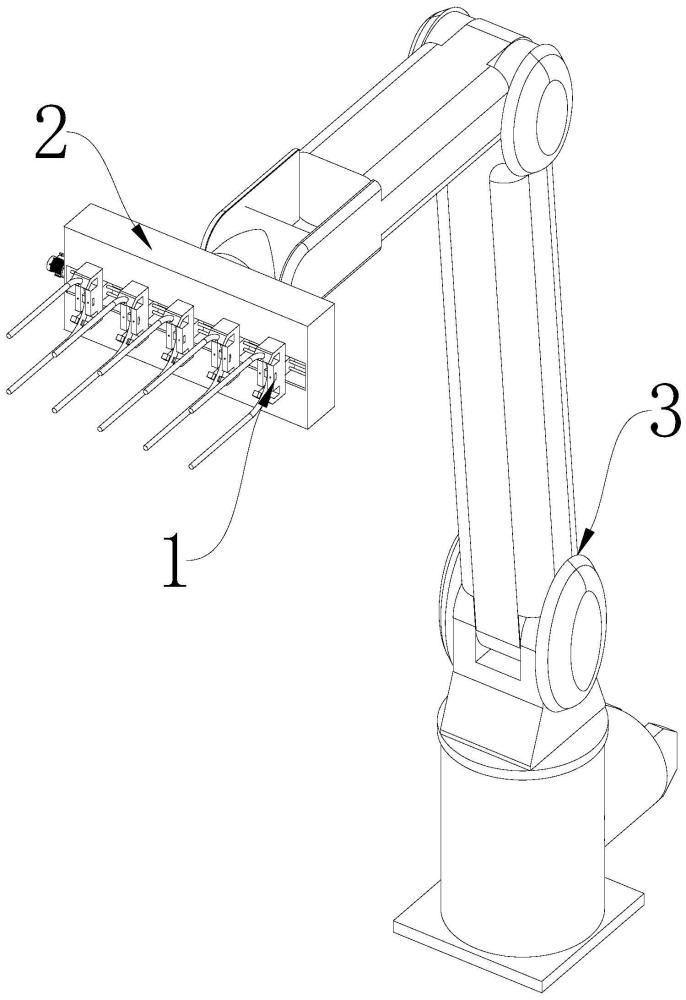
图2为本发明的卡爪聚拢组装设备整体结构示意图;
图3为本发明的卡爪散开组装设备整体结构示意图;
图4为本发明的卡爪结构示意图;
图5为本发明的剖面结构示意图;
图6为本发明的固定件结构示意图;
图7为本发明的滑座上的结构示意图;
图8为本发明的滑块聚拢时结构示意图;
图9为本发明的滑块分散剖面时结构示意图;
图10为本发明的剪式伸缩臂折叠结构示意图;
图11为本发明的剪式伸缩臂展开结构示意图。
图号说明:1、卡爪;11、侧壁;12、顶梁;13、腹块;14、卡槽;15、弧槽;16、通孔;17、限位块;18、凹槽;2、滑座;21、导杆;22、双向丝杆;23、滑块;24、转轴;3、机械臂;4、固定件;41、圆柱;42、套杆;43、限位杆;44、环形槽;45、凸杆;25、剪式伸缩臂;251、第一折叠臂;252、第二折叠臂;253、凸起。
具体实施方式
下面结合附图进一步详细描述本发明。
以下描述用于揭露本发明以本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变形。在以下描述中界定的本发明的基本原理可以用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置是基于附图所示的方位或位置关系,其仅是为了便于描述本发明的简化描述,而不是指示或者暗示所指的装置或原件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
实施例:
请参阅图1-11,本申请提供一种数学练习器组装设备,包括:卡爪1、滑座2、机械臂3;卡爪1用于抓取均匀分布的滑杆;滑座2用于和多个卡爪1连接,控制夹紧滑杆并等距分布;
机械臂3和滑座2连接控制移动反正,用于安装算珠及和底座连接;
卡爪1内部安装有固定件4,用于相邻卡爪1分离时对滑杆夹紧。
下面结合附图,对本申请的一些实施方式进行详细说明:
需要说明的是,本申请的数学练习器由T型的底座、U型的滑杆及算珠组成;每个滑杆上安装九个算珠。
在本实施例中,包括卡爪1;
采用五个卡爪1用于一次抓取五个滑杆,滑杆被挂在输送带上均匀硬,卡爪1抓取滑杆后导致让端部朝上,用于套上散珠,并在算珠安好后与底座对接固定。
卡爪1与滑杆之间采用插拔夹持的固定方式,通过过盈配合增大摩擦力,让滑杆在安装算珠是稳定。
在底座与滑杆对接固定时,会通过固定件4对滑杆加固,确保组装稳定。其中固定件4隐藏设置在卡爪1内部。
在本实施例中,包括滑座2;
五个卡爪1均安装在滑座2上,滑座2会控制多个卡爪1聚拢和分散。聚拢时卡爪1用于抓取滑杆,分散时卡爪1用于对接底座,卡爪1分散后滑杆的间距是其在底座上的间距。
在一些实施方式中,滑座2上可安装不限于五个的卡爪1,卡爪1分散的间距可调。
在本实施例中,包括机械臂3;
机械臂3采用多自由度设计,滑座2安装在机械臂3端部,机械臂3控制滑座2倒置去抓取滑杆,在控制滑座2翻转与散珠通道对接,安装算珠后调整较多与底座对接固定。
需要说明的是,数学练习器组装设备还包括了用于输送滑杆向机械臂3靠近的等距输送带、用于输送算珠的通道、携带底座的上工作台;算珠在通道内自由落体并落入滑杆中,滑杆上装好算珠后朝向上工作台与底座连接。
在本实施例中,卡爪1是由侧壁11、顶梁12、腹块13组成,侧壁11固定在顶梁12两侧并与其组成U型结构,腹块13安装在顶梁12底面中部其两侧是侧壁11。卡爪1用于抓取滑杆的弯折端,因此侧壁11为了更好的与滑杆接触呈弧形设置。
侧壁11上设置了卡槽14,腹块13上设置了弧槽15。抓取时,滑杆会陷入卡槽14及弧槽15中,由此卡爪1通过三点与滑杆连接。上述的连接固定方式中,滑杆在外力下可轻松取下,用于和底座连接时稳定性不够。
进一步的,腹块13上垂直设置通孔16,通孔16经过弧槽15并被其左右分隔,通孔16两端均安装了可穿入弧槽15内的限位块17,限位块17在通孔16内部滑动但无法从其中滑出。
进一步的,顶梁12顶面中部设置了凹槽18,固定件4被安装在凹槽18中,固定件4会与限位块17连接并对其控制。
固定件4包括了圆柱41、套杆42、限位杆43等;圆柱41被转动安装在凹槽18内部,圆柱41外侧倾斜设置环形槽44;套杆42套在圆柱41中,套杆42的内侧固定有凸杆45,凸杆45穿入环形槽44中;两个限位杆43对称设置在套杆42两端的耳座上。限位块17端面设有斜槽,限位杆43底端呈锥形结构并穿入斜槽中。
初始状态凸杆45位于环形槽44顶部,工作时圆柱41每次旋转90°,套杆42受限位杆43限制无法旋转,圆柱41旋转时套杆42沿其向下滑动,凸杆45移至环形槽44底端,限位杆43挤压斜槽让限位块17向弧槽15移动将滑杆卡死。增加滑杆的固定强度用于和底座连接。对接结束后,圆柱41持续或反向旋转90°,凸杆45重新移至环形槽44顶部,限位杆43脱离斜槽,解除对滑杆的锁定。
需要注意的是,圆柱41每次旋转的控制都来自于滑座2。
在本实施例中,滑座2上安装了双向丝杆22和导杆21以及五个滑块23,双向丝杆22与导杆21平行设置并与滑座2转动配合,滑块23同时被双向丝杆22和导杆21穿过。导杆21与滑块23滑动配合,双向丝杆22中部光滑设有一个滑块23,另个四个滑块23围绕中部对称设置并与双向丝杆22螺纹配合。
滑座2还安装驱动器用于控制双向丝杆22转动,双向丝杆22在旋转的过程中,位于中部的滑块23静止不动,两侧的滑块23分别向两端均匀移动展开。
需要注意的是,五个滑块23中,三个位于双向丝杆22中部的滑块23其中不与螺纹端接触,外侧的两个滑块23处于螺纹端。双向丝杆22在转动时,外侧的两个滑块23先移动,然后外侧的滑块23在拖动内侧的滑块23向螺纹端移动。
相邻两个滑块23之间通过剪式伸缩臂25,两个滑块23靠近时,剪式伸缩臂25折叠,外侧滑块23移动时,控制剪式伸缩臂25展开并在其展开后拖拽内侧的滑块23向外移动。展开过程后五个滑块23等距分布,其间距为滑杆安装在底座上的距离,该距离可通过调节剪式伸缩臂25的臂长来改变。
需要说明的是,双向丝杆22与导杆21分别从侧边穿过滑块23,在滑块23的中部贯穿设置转轴24,转轴24垂直与双向丝杆22与导杆21,滑块23用于和卡爪1连接并对凹槽18密封。转轴24的一端穿入凹槽18中不与圆柱41连接固定,转轴24的另一端与剪式伸缩臂25连接。
剪式伸缩臂25的收缩展开时其控制转轴24旋转小于等于90°。由此初始状态,剪式伸缩臂25为收缩状,滑块23相互贴近。此时用于抓取滑杆和安装算珠。剪式伸缩臂25展开时,滑杆分散开同时转轴24出现转动并控制限位块17将滑杆固定。
需要说明的是,剪式伸缩臂25由第一折叠臂251和第二折叠臂252组成,第一折叠臂251和第二折叠臂252端部转动连接,该连接端设有背向卡爪1反向设有凸起253,第一折叠臂251一端与转轴24连接固定,第二折叠臂252一端与另一个转轴24转动配合。第一折叠臂251和第二折叠臂252自身可进行伸缩,但是伸缩阻力较大,在不收外力作用时,其作为直杆正常使用。并能完成上述中剪式伸缩臂25的收缩展开,并完成对转轴24的旋转控制。
凸起253上套接垂直于滑块23移动方向的连接杆,多个连接杆的一端与推板连接,推板可通过连接杆推动凸起253移动让第一折叠臂251和第二折叠臂252伸长。可在滑座2不动情况下让转轴24继续转动。
推板连接到无自锁的气推器上,在停止工作时不阻碍推板的移动。
需要说明的是,滑块23和卡爪1均匀分散并与底座连接后,滑杆被固定在底座上间距无法改变。导致滑块23和卡爪1无法回收,且滑杆无法从卡爪1上取下。通过推板推动第一折叠臂251和第二折叠臂252让其自身伸长,此时会控制转轴24持续旋转接触对限位块17的锁定,可取下滑杆,并让卡爪1与滑块23复位。
本领域技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能以及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
- 一种用于陶瓷封装器件的组装夹具和组装设备
- 一种链条组装设备及销轴组装装置和方法
- 一种笛音烟花智能组装设备及组装方法
- T形截面的空心电梯导轨组装设备及基于其的自动组装生产线和组装打包方法
- 一种小学数学练习器
- 一种便携式数学公式练习器