一种智能手铐
文献发布时间:2023-06-19 09:24:30
技术领域:
本发明属于警用器具技术领域,特指一种智能手铐。
背景技术:
执行法院对被执行人进行网上布控时,公安机关控制被执行人后,需要执行法院将被执行人带回当地,这不仅增加在途风险,还浪费大量的人力、物力。据不完全统计,2019年浙江省的执行案件有70多万件,个别法院人均办案500多件,案多人少矛盾十分突出。如何利用科技手段,减少人力支出,提高执行效率,是人民法院当前迫切需要解决的问题。
早在2004年7月21日,有人便提出了智能遥控电机手铐(公告号CN2890266Y)的专利申请。该专利在原有手铐的基础上增加无线电发射装置和无线电接收装置,无线电发射装置包括电源、开关、无线脉冲信号依次经编码器,调制器至发射器发出。无线电发射装置由使用人,如公安人员,随身携带,可通过编码技术遥控一个或一组接收装置。在铐体内设置无线电接收装置,接收后的无线脉冲信号依次经调解器、放大整形器、解码器、开关发出高压电。当受控人员,如犯罪嫌疑人,不易制服时,操控人员可通过无线电发射装置主动控制高压放电电极发出高压电。当受控人员带铐后想逃逸,超越设定的距离,则手铐铐体内的电子感应装置自动启动,发出高压电。
上述专利的监控范围比较小,不能实现远距离控制。此外,发出高压电,对于一些自身带有身体疾病(如心脏病等)的犯人而言,高压电容易诱发病人犯病,存在着安全隐患。
发明内容:
本发明的目的是提供一种使用安全可靠的、可以进行远距离控制、执行效果好的智能手铐。
本发明是这样实现的:
一种智能手铐,包括定铐环及动铐环,所述定铐环的一端与动铐环的一端通过铰接轴铰接,在定铐环上设置有锁壳,所述锁壳内设置有带动动铐环绕铰接轴转动进而缩小定铐环与动铐环围成的铐圈尺寸的缩紧机构,所述缩紧机构由控制单元驱动,所述控制单元设置在锁壳内。
在上述的一种智能手铐中,所述缩紧机构包括位于所述动铐环上伸入锁壳内一端的棘齿部、摇杆、驱动电机、棘爪、棘爪电机,所述摇杆的下端转动连接在驱动电机的转轴上、上端设置有棘爪,所述棘爪通过棘爪电机与摇杆连接,所述驱动电机带动摇杆、棘爪电机及棘爪绕转轴的轴线摆动,所述棘爪电机带动棘爪在摇杆上绕第棘爪电机的转轴转动,所述棘爪插入棘齿部对应的齿槽内。
在上述的一种智能手铐中,所述缩紧机构包括位于所述动铐环上伸入锁壳内一端的凸齿部、与凸齿部啮合传动的齿轮及驱动齿轮转动的驱动电机,所述齿轮与凸齿部啮合传动。
在上述的一种智能手铐中,所述控制单元包括控制器、电机驱动电路、无线通信模块、GPS模块,所述电机驱动电路、无线通信模块、GPS模块均与控制器连接,所述电机驱动电路与驱动电机连接。
在上述的一种智能手铐中,所述电机驱动电路与控制器之间设置有干簧管,所述干簧管控制电机驱动电路的通断。
在上述的一种智能手铐中,所述控制器上连接有重力传感器,控制器根据重力传感器传送的信号控制电机驱动电路实现对驱动电机动作的控制。
在上述的一种智能手铐中,所述锁壳上设置有太阳能电池板,所述太阳能电池板与锁壳内的蓄电池连接,所述蓄电池与控制器连接并对控制器进行供电。
在上述的一种智能手铐中,所述控制器上连接有语音播报器。
在上述的一种智能手铐中,所述锁壳内还设置有压力传感器,压力传感器与控制器连接。
在上述的一种智能手铐中,所述控制器上连接有定时模块,所述定时模块内预设有定时周期,控制器根据定时模块设定的定时周期控制电机驱动电路实现对驱动电机动作的控制。
本发明相比现有技术突出的优点是:
1、本发明通过各种方式驱动缩径机构自动工作,对手铐佩戴者进行惩戒,使其产生一定的不适感,及时地回当地法院报到,给法院的执法工作带来了极大的便利,同时也提高了执法效率,节约人力物力财力。
2、本发明不会对人体造成伤害,安全可靠。
附图说明:
图1是本发明的示意简图;
图2是本发明的实施例一的示意图;
图3是本发明的实施例二的示意图;
图4是图3的局部放大示意图;
图5是本发明的电路连接框图。
图中:1、定铐环;2、动铐环;3、铰接轴;4、锁壳;5、棘齿部;6、摇杆;7、驱动电机;8、棘爪;9、棘爪电机;10、转轴;11、凸齿部;12、齿轮;13、控制器;14、电机驱动电路;15、无线通信模块;16、GPS模块;17、红外传感器;18、重力传感器;19、定时模块;20、语音播报器;21、压力传感器。
具体实施方式:
下面以具体实施例对本发明作进一步描述:
实施例一:如图1、图2和图5所示:
一种智能手铐,包括定铐环1及动铐环2,所述定铐环1的一端与动铐环2的一端通过铰接轴3铰接,在定铐环1上设置有锁壳4,所述锁壳4内设置有带动动铐环2绕铰接轴3转动进而缩小定铐环1与动铐环2围成的铐圈尺寸的缩紧机构,所述缩紧机构由控制单元驱动,所述控制单元设置在锁壳4内。
本发明通过锁紧机构缩小铐圈尺寸,被佩戴者的身体产生一定的不适感,使其主动及时地回法院报到。
本发明所述控制单元包括控制器13、电机驱动电路14、无线通信模块15、GPS模块16,所述电机驱动电路14、无线通信模块15、GPS模块16均与控制器13连接,所述电机驱动电路14与还与驱动电机7连接。通过无线通信模块15可以实时地将信息传送至监控平台,便于监控平台的工作人员进行监控管理。GPS模块16可以对佩戴者的位置进行实施监控,在拒不回法院报到的,通过GPS模块16的定位进行抓捕。
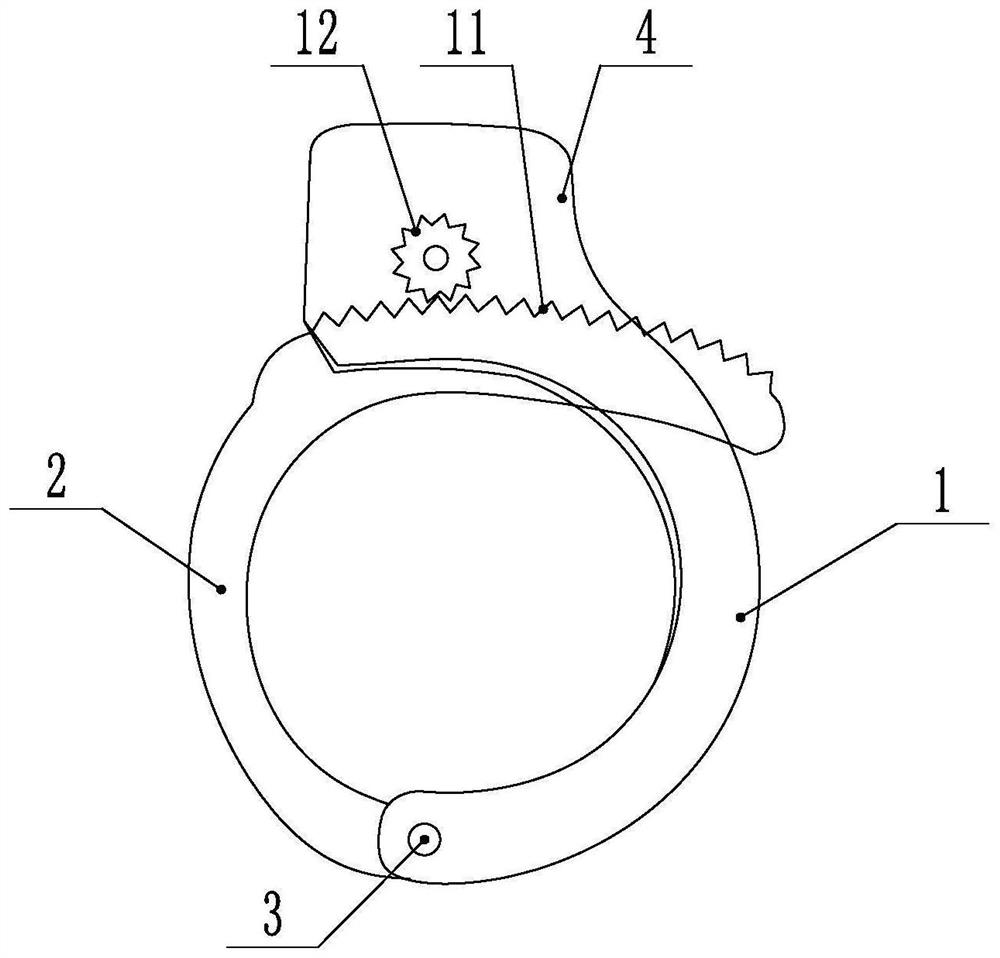
本实施例所述缩紧机构包括位于所述动铐环2上伸入锁壳4内一端的凸齿部11、能与凸齿部11啮合传动的齿轮12及驱动齿轮12转动的驱动电机7,所述齿轮12与凸齿部11啮合传动。
本实施例的智能手铐在组装时,可以使动铐环2的凸齿部11与齿轮12处于啮合状态,即定铐环1及动铐环2本身就围成了铐圈,该铐圈的尺寸便于佩戴者的手穿过。佩戴好后,可以通过锁壳4上的手动按钮或者遥控器驱动驱动电机7转动一定的圈数,使得动铐环2锁紧至不能从佩戴者手上脱离的尺寸。
本实施例的动铐环2与定铐环1也可以处于分离状态。佩戴时,将定铐环1插入锁壳4后,在锁壳4内设置有对射的红外传感器17,当红外传感器17对射的红外线被遮挡,红外传感器17发送信号至控制器13,驱动驱动电机7的转轴10转动设定的圈数,使得定铐环1与动铐环2不能分离。
为了达到对动铐环2的自动锁紧,本发明具有如下实现方案:
1、在所述电机驱动电路14与控制器13之间设置有干簧管,所述干簧管控制电机驱动电路14的通断。当佩戴者带上手铐后,需要保持一定的姿势,以防止干簧管接通。当干簧管接通,电机控制电路14变会驱动驱动电机7转动,进而带动动铐环2绕铰接轴3转动进而缩小铐圈尺寸。这种结构给佩戴者带的生活来了一定的不便,驱使其自动去法院报到。
2、在所述控制器13上连接有重力传感器18,控制器13根据重力传感器18传送的信号控制电机驱动电路14实现对驱动电机7动作的控制,这种结构同样也给佩戴者带的生活来了一定的不便,驱使其自动去法院报到。
3、在控制器13上连接有定时模块19,所述定时模块19内预设有定时周期,控制器13根据定时模块19设定的定时周期控制电机驱动电路14实现对驱动电机7动作的控制。定时模块19每间隔一定的时间,便向控制器发送信号,由控制器通过电机控制电路驱动驱动电机7转动,缩小铐圈尺寸。
由于本发明采用电动的方式控制动铐环2的动作,为了实现持续供电,本发明在所述锁壳4上设置有太阳能电池板,在锁壳4设置有蓄电池,所述太阳能电池板给蓄电池供电,所述蓄电池与控制器13连接并对控制器13进行供电。
本发明在所述控制器13上连接有语音播报器20。控制器13内预设有手铐佩戴者的裁判文书,控制器13通过语音播报器20循环播放。进一步配合缩紧机构,使得被执行人员能够自行回法院报到,提高法院的办案能力,节省了人力和物力。
为了防止佩戴者破坏手铐,所述锁壳4内还设置有压力传感器21,压力传感器21与控制器13连接当压力传感器21因破坏导致压力发生变化,压力传感器21将信号发送至控制器13,控制器通过电机驱动电路14实现对驱动电机7动作的控制进一步缩小铐圈,同时,控制器13通过无线通信模块15向监控平台发送信息。
本实施例需要解除惩戒功能时,需要配备遥控器,遥控器上设置有发射端,控制器上设置有接收端,遥控器向控制器发送信号,使得驱动电机7的转轴10反向转动,达到扩大铐圈尺寸直至取下手铐。
也可以在锁壳4内设置驱动驱动电机7的转轴10反向转动的拨杆,该拨杆需要由特定的钥匙来驱动。
实施例二:如图3、图4和图5所示:
本实施例与实施例一的主要区别在于:
本实施例的缩紧机构与实施例一不同。
本实施例的缩紧机构包括位于所述动铐环2上伸入锁壳4内一端的棘齿部5、摇杆6、驱动电机7、棘爪8、棘爪电机9,所述摇杆6的下端设置在驱动电机7的转轴10上,并随转轴10同步转动,所述棘爪电机9带动棘爪8在摇杆6上绕棘爪电机9的转轴转动,所述棘爪8插入棘齿部5对应的齿槽内。
当需要缩紧时,控制器13控制棘爪电机9驱动棘爪8转向缩紧方向,且控制器控制驱动电机7的转轴10转动,带动摇杆6绕转轴10的轴线摆动,逐渐将动铐环2往缩紧的方向推。
当需要放松时,控制器控制棘爪电机9驱动棘爪8转向放松放线,且控制器控制驱动电机7的转轴10反向转动,带动摇杆6绕转轴10的轴线摆动,逐渐将动铐环2往放松的方向推。
上述实施例仅为本发明的较佳实施例之一,并非以此限制本发明的实施范围,故:凡依本发明的形状、结构、原理所做的等效变化,均应涵盖于本发明的保护范围之内。