一种通过视觉定位的缝纫送料机构
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及一种缝纫设备,具体地说是一种通过视觉定位的缝纫送料机构。
背景技术
现有缝纫机工作时,通常采用X向送料机构和Y向送料机构控制缝料在XY坐标系内移动,使缝纫点送至机针处。采用X向送料机构和Y向送料机构在直线缝纫线迹上具有优势,但对于缝纫物料轮廓等圆弧线迹,缝纫质量还有待改进。
发明内容
本发明针对上述现有技术现状,而提一种自动送料的包缝机,可以采用机械手极坐标系进行送料移动,有效提高圆弧轮廓线迹的缝纫质量。
本发明解决上述技术问题所采用的技术方案为:一种通过视觉定位的缝纫送料机构,包括机架,机架设有视觉识别机构和视觉取像区域,机架设有X向移动导轨,X向移动导轨上设有用于移动缝料装夹模板的机械手;机械手包括竖直布置的第一支臂第一支臂的下端连接有横向布置并能绕第一支臂转动的第二支臂,第二支臂的外端连接有横向布置并能转动的第三支臂;第三支臂的活动端设有升降和转动的花键轴,花键轴的下端连接有模板安装板;第三支臂内设有用于驱动花键轴转动的第一电机,以及用于驱动花键轴升降的气缸;第二支臂设有驱动其相对于第一支臂转动的第三电机;模板安装板与缝料装夹模板连接;视觉识别机构识别缝料装夹模板的缝料轮廓,并生成机械手的移动轨迹。
为优化上述技术方案,本发明还包括以下改进的技术方案。
上述第三支臂的转动连接端通过第一轴承与第二支臂连接,第三支臂内设有用于驱动第三支臂相对于第二支臂转动的第二电机。
上述的第三支臂的活动端设有第二轴承,花键轴与第二轴承的内圈轴向滑动配合,花键轴连接有驱动同步轮,驱动同步轮通过同步带与第一电机上的主动同步轮连接。
上述的第三支臂具有椭圆型壳体,第二电机和第二轴承分布于椭圆型壳体的两端;在椭圆型壳体的中部设有传动同步轮,传动同步轮具有外圈轮齿和内圈轮齿;第一电机位于传动同步轮和第二电机之间,主动同步轮通过第一传动带与传动同步轮的外圈轮齿连接;驱动同步轮通过第二传动带传动同步轮的内圈轮齿连接。
上述的气缸布置于第二轴承和传动同步轮之间;第二传动带的套设于气缸外侧,椭圆型壳体设有涨紧同步轮。
上述气缸的缸体与升降导轨连接,升降导轨上的升降滑块与气缸的活塞杆连接;升降滑块通过第三轴承与花键轴的上端连接。
上述的模板安装板设有锁紧开关,锁紧开关连接有锁紧连杆。
上述的机架设有Y向导轨,Y向导轨设有能滑动的包缝机头。
上述的缝料装夹模板设有中心坐标点、位于中心坐标点两侧的第一参考点和第二参考点;视觉识别机构根据中心坐标点计算机械手的抓取中心坐标,根据第一参考点和第二参考点计算缝料装夹模板的定位角度。
上述的视觉识别机构根据缝料轮廓计算缝纫线迹,并将缝纫线迹转换为机械手的移动轨迹。
与现有技术相比,本发明的一种通过视觉定位的缝纫送料机构,通过视觉定位机械手执行端的模板安装板与缝料装夹模板连接,识别出缝料轮廓线并根据收缩余量计算出缝纫线迹,通过机械手的多级支臂旋转送料,提高圆弧线迹的缝纫质量。
附图说明
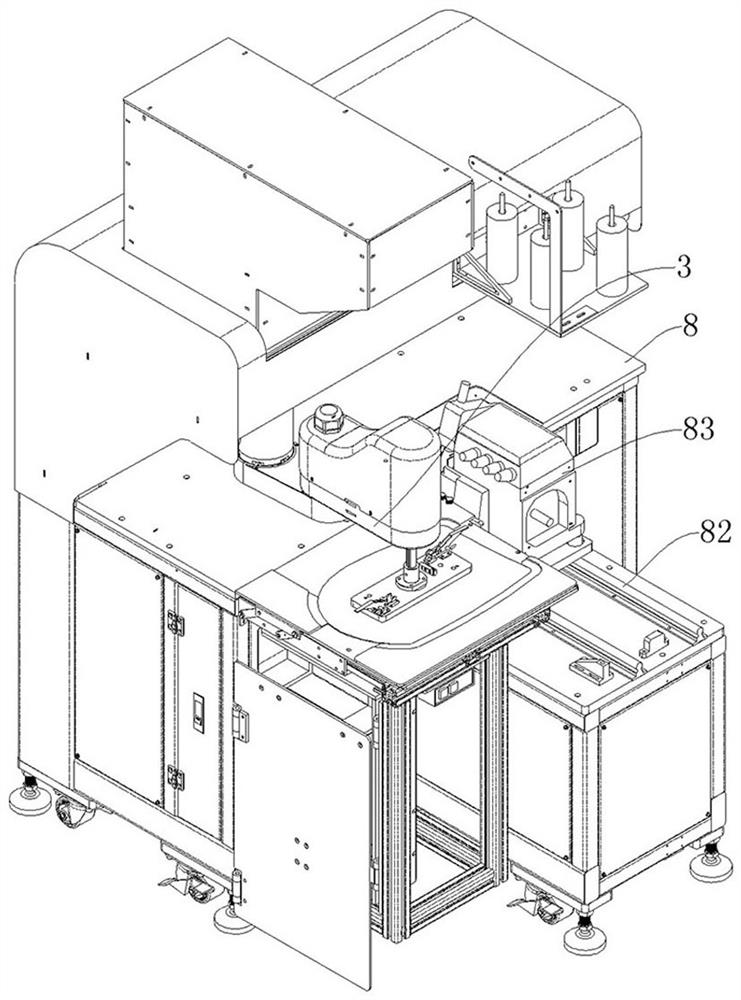
图1是本发明实施例的整体结构示意图。
图2是图1中机械手的整体结构示意图。
图3是图2中机械手的局部结构示意图。
图4是图3中机械手的内部结构示意图。
图5是图4的仰视图。
具体实施方式
以下结合附图对本发明的实施例作进一步详细描述。
图1至图5所示为本发明的结构示意图。
其中的附图标记为:第一支臂1、第二支臂2、第三电机21、第三支臂3、第一电机31、主动同步轮31a、气缸32、第一轴承33、第二电机34、第二轴承35、花键轴4、驱动同步轮41、升降导轨42、第三轴承43、升降滑块44、模板安装板5、锁紧开关51、锁紧连杆52、传动同步轮6、涨紧同步轮7、机架8、X向移动导轨81、Y向导轨82、包缝机头83。
本发明的用于缝纫送料的机械手,包括竖直布置的第一支臂1,第一支臂1的下端连接有横向布置并能绕第一支臂1转动的第二支臂2,第二支臂2的外端连接有横向布置并能转动的第三支臂3。第三支臂3的活动端设有升降和转动的花键轴4,花键轴4的下端连接有模板安装板5。第三支臂3内设有用于驱动花键轴4转动的第一电机31,以及用于驱动花键轴4升降的气缸32。第二支臂2设有驱动其相对于第一支臂1转动的第三电机21。
通过视觉定位的缝纫送料机构,包括机架8,机架8设有视觉识别机构和视觉取像区域,机架8设有X向移动导轨81,机械手滑动设置在X向移动导轨81上。模板安装板5与缝料装夹模板连接,缝料装夹模板经视觉识别机构识别缝料轮廓,生成机械手的移动送料轨迹。
第三支臂3的转动连接端通过第一轴承33与第二支臂2连接,第三支臂3内设有用于驱动第三支臂3相对于第二支臂2转动的第二电机34。
第三支臂3的活动端设有第二轴承35,花键轴4与第二轴承35的内圈轴向滑动配合,花键轴4连接有驱动同步轮41,驱动同步轮41通过同步带与第一电机31上的主动同步轮31a连接。
第三支臂3具有椭圆型壳体,第二电机34和第二轴承35分布于椭圆型壳体的两端。在椭圆型壳体的中部设有传动同步轮6,传动同步轮6具有外圈轮齿和内圈轮齿。第一电机31位于传动同步轮6和第二电机34之间,主动同步轮31a通过第一传动带与传动同步轮6的外圈轮齿连接。驱动同步轮41通过第二传动带传动同步轮6的内圈轮齿连接。
气缸32布置于第二轴承35和传动同步轮6之间。第二传动带的套设于气缸32外侧,椭圆型壳体设有涨紧同步轮7。
气缸32的缸体与升降导轨42连接,升降导轨42上的升降滑块44与气缸32的活塞杆连接。升降滑块44通过第三轴承43与花键轴4的上端连接。
模板安装板5设有锁紧开关51,锁紧开关51连接有锁紧连杆52。缝料装夹模板放置到视觉取像区域后,视觉识别机构通过视觉识别缝料装夹模板位置,并控制机械手移动,使模板安装板5与缝料装夹模板连接。
缝料装夹模板设有中心坐标点、位于中心坐标点两侧的第一参考点和第二参考点。视觉识别机构根据中心坐标点计算机械手的抓取中心坐标,根据第一参考点和第二参考点计算缝料装夹模板的定位角度。
视觉识别机构根据缝料轮廓以及轮廓收缩余量计算缝纫线迹,并将缝纫线迹转换为机械手的移动轨迹。视觉识别机构在计算缝纫线迹时,以缝料装夹模板的中心坐标点为圆点,利用极坐标系计划机械手转动缝料装夹模板的角度,有效提高圆弧线迹的缝纫质量。
在机架的一侧设有包缝机头83。机架8设有Y向导轨82,包缝机头83滑动设置在Y向导轨82上。通过机械手和视觉识别机构将缝料自动送至包缝机头83处包边缝纫。
本发明的最佳实施例已阐明,由本领域普通技术人员做出的各种变化或改型都不会脱离本发明的范围。
- 一种通过视觉定位的缝纫送料机构
- 一种送料机构及具有该送料机构的缝纫机