一种基于运动想象上肢运动康复治疗方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及人工智能领域及脑机接口上肢康复应用研究领域,尤其是指一种基于运动想象上肢运动康复治疗方法。
背景技术
脑卒中是一种以脑部缺血和出血性损伤症状为主的疾病,具有极高的病死率和致残率。脑卒中发病急,病死率高,是世界上最重要的致死性疾病之一。根据世界卫生组织最新的调查显示:中国脑卒中患者有近八成患有不同程度的运动功能障碍。
当前,面向脑卒中患者的康复治疗形式仍然是以传统被动式运动康复训练和物理疗法为主。其中,被动式运动康复训练是指患者在专业治疗师的协助下进行大量重复性的肢体运动。物理疗法如按摩、针灸、低频电刺激等。传统被动式康复训练和物理治疗具有效率低、见效慢等缺点。
研究表明:脑机接口能够从脑信号中解码患者的运动意图,加强对脑损伤区域的干预,激活脑神经的可塑性,提高患者运动再学习的能力。与传统治疗手段相比,使用脑机接口技术的患者康复效果更好。但是,目前该存在着挑战。例如,重度脑卒中患者病情重,很难获得理想的脑机交互性能,从而无法完成康复训练任务而受挫,参与治疗的积极性也受到了影响。因此,一部分患者可能由于性能不理想而不得不放弃参与康复治疗。
发明内容
本发明的目的在于克服现有技术的缺点和不足,提供了一种基于运动想象上肢运动康复治疗方法,该方法能够在一定程度上减少脑机交互性能对脑机接口运动康复治疗的影响。
为实现上述目的,本发明所提供的技术方案为:一种基于运动想象上肢运动康复治疗方法,包括以下步骤:
一、脑卒中患者头戴电极帽坐在轮椅上,跟随计算机屏幕上显示的虚拟上肢动作进行30个trial的运动想象任务。系统将采集患者在执行想象任务时的EEG信号以及每两个任务之间患者休息时的EEG信号。将这两种状态的EEG信号训练分类器。
二、在分类器训练结束后,患者需要按系统提示执行60个trial的上肢运动想象康复治疗任务。上肢运动想象康复治疗任务分为两个阶段。在前一阶段,患者需要在10秒内完成运动想象任务。在患者执行运动想象任务的过程中,系统每隔500毫秒对患者的EEG信号进行一次运动意图检测和脑控能力评估。根据评估的结果,对脑机控制权重进行自适应分配;最后将协同控制的结果转化为控制指令,实时对虚拟上肢进行同步控制。
三、在后一阶段,如果患者在指定的时间内完成了该次运动想象任务,系统将驱动功能电刺激设备对患者上肢相应的肌肉进行电刺激,促使其完成与虚拟上肢一致的动作,并保持该动作4秒;否则,不施加电刺激给患者。患者完成当前治疗任务后休息5秒,休息结束后将继续重复步骤二、三、进行下一次同样的治疗任务,直至完成所有的治疗任务。
在步骤一、二、三、中所述患者需要执行运动想象任务不限于某个固定的想象任务,任务的具体内容和任务完成时的状态一般可以根据患者的患病情况来自定义。例如,某个脑卒中患者右侧上肢腕部运动功能障碍,治疗师可以将想象平放在桌面上的右侧手腕(任务初始状态)升到与桌面水平面成60度夹角(任务完成时的状态)设置为该患者的运动想象任务。为了帮助患者理解任务,系统不仅会语音提示,而且在提示的同时视觉呈现与任务相对应的三维虚拟上肢运动。
在步骤二、中,所述脑控能力评估主要包含两个步骤:
A.通过对当前时刻的前2秒EEG信号依次进行预处理、特征提取和分类识别,最后将分类器输出值作为当前时刻患者运动想象的强度;
B.根据患者在当前时刻包括在内的4次运动想象强度和完成该trial的治疗任务所需的最小运动想象强度,对当前时刻的任务完成度进行预测。任务的完成度越高表示患者的脑控能力越强,反之亦然;
步骤二、中的脑机控制权重自适应分配,具体通过以下步骤:
A.计算当前时刻患者完成该次任务失败的可能性;
B.计算系统对患者完成该次任务时所施加辅助程度;
C.以同时最小化任务失败可能性和施加辅助程度为目标,根据最优化方法,计算分配给患者控制和系统辅助控制的最优权重。
步骤三中的系统驱动功能电刺激设备对患者上肢相应的肌肉进行电刺激,促使其完成与虚拟上肢一致的动作,具体通过以下步骤:
A.根据虚拟上肢的三维模型,计算虚拟上肢的肩关节、肘关节、腕关节和掌指关节等主要关节的相对角度;
B.分别对与上述关节肌肉运动相关的电刺激电极贴片施加对应强度的电刺激;
C.通过固定在上肢各关节的角度传感器,实时感知各关节的相对角度;计算感知的相对角度与模型的相对角度的角度差,并作为PID控制器的输入,PID控制器根据PID控制算法实时调整电刺激的强度,从而快速获得与虚拟上肢一致的动作。
本发明与现有技术相比,具有如下优点与有益效果:
1.本发明通过检测患者的运动意图和预测当前康复治疗任务的完成度,从而对患者的脑控能力进行评估。脑控能力评估在系统为患者施加适当的控制辅助提供了参考依据,从而避免了辅助程度不当对康复治疗产生不利影响。
2.传统的脑机交互康复治疗完全由脑机交互的性能决定,脑机交互性能将会直接影响患者是否能按时按成预定的康复训练任务。但是,重度脑卒中患者病情重,身体情况极不稳定,很难获得较好的脑机交互性能。本发明根据患者脑控能力,自适应分配患者脑控和系统辅助控制的权重。当患者脑控能力较低时,系统提供一定程度的辅助,帮助患者在自身努力的前提下完成康复任务,提高其完成度,从而避免这类患者受挫;当患者的脑控能力较高,并且自身能够完成康复训练任务,系统将不会为患者提供辅助控制。因此,本发明为脑机交互性能不稳定的脑卒中患者参与脑机接口运动康复治疗提供了一种可行的方法。
附图说明
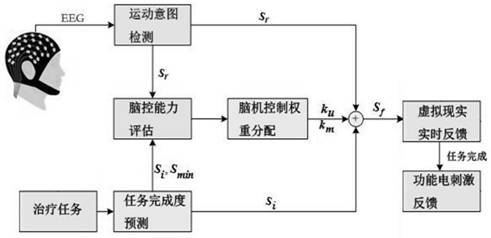
图1为本发明的系统框架图。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
本实施例提供的基于运动想象上肢运动康复治疗方法,能够实时对患者进行运动意图检测和康复治疗任务完成度的预测,进而对患者的脑控能力进行评估。根据评估的结果,对患者脑控和系统辅助控制权重进行自适应分配;最后将协同控制的结果转化为控制指令,对虚拟上肢进行同步控制。如果患者在规定的时间内完成了该次治疗任务,系统将驱动功能电刺激设备对患者上肢相应的肌肉进行电刺激,促使其完成与虚拟上肢一致的动作。
所述基于运动想象上肢运动康复治疗方法,包括以下步骤:
一、脑卒中患者头戴电极帽坐在轮椅上,跟随计算机屏幕上显示的虚拟上肢动作进行30个trial的运动想象任务。系统将采集患者在执行想象任务时的EEG信号以及每两个任务之间患者休息时的EEG信号。将这两种状态的EEG信号训练分类器。
二、在分类器训练结束后,患者需要按系统提示执行60个trial的上肢运动想象康复治疗任务。上肢运动想象康复治疗任务分为两个阶段。在前一阶段,患者需要在10秒内完成运动想象任务。在患者执行运动想象任务的过程中,系统每隔500毫秒对患者的EEG信号进行一次运动意图检测和脑控能力评估。根据评估的结果,对脑机控制权重进行自适应分配;最后将协同控制的结果转化为控制指令,实时对虚拟上肢进行同步控制。
三、在后一阶段,如果患者在指定的时间内完成了该次运动想象任务,系统将驱动功能电刺激设备对患者上肢相应的肌肉进行电刺激,促使其完成与虚拟上肢一致的动作,并保持该动作4秒;否则,不施加电刺激给患者。患者完成当前治疗任务后休息5秒,休息结束后将继续重复步骤二、三、进行下一次同样的治疗任务,直至完成所有的治疗任务。
在步骤一和步骤二中,所述患者需要执行运动想象任务不限于某个固定的想象任务,任务的具体内容和任务完成时的状态一般可以根据患者的患病情况来自定义。例如,某个脑卒中患者右侧上肢腕部运动功能障碍,治疗师可以将想象平放在桌面上的右侧手腕(任务初始状态)升到与桌面水平面成60度夹角(任务完成时的状态)设置为该患者的运动想象任务。为了帮助患者理解任务,系统不仅会语音提示,而且在提示的同时视觉呈现与任务相对应的三维虚拟上肢运动。
在步骤二中,所述的患者脑控能力评估,具体通过以下两个步骤实现:
A.通过对当前时刻的前2秒EEG信号依次进行预处理、特征提取和分类识别,最后将分类器输出值作为当前时刻患者运动想象的强度;
B.根据患者在当前时刻包括在内的4次运动想象强度和完成该trial的治疗任务所需的最小运动想象强度,对当前时刻的任务完成度进行预测。任务的完成度越高表示患者的脑控能力越强,反之亦然;
步骤二中的脑机控制权重自适应分配,具体通过以下步骤实现:
A.计算当前时刻患者完成该次任务失败的可能性;
B.计算系统对患者完成该次任务时所施加辅助程度;
C.以同时最小化任务失败的可能性和施加辅助程度为目标,根据最优化方法,计算分配给患者控制和系统辅助控制的最优权重。
在步骤三中,系统驱动功能电刺激设备对患者上肢相应的肌肉进行电刺激,促使其完成与虚拟上肢一致的动作,具体通过以下步骤:
A.根据虚拟上肢的三维模型,计算虚拟上肢的肩关节、肘关节、腕关节和掌指关节等主要关节的相对角度;
B.分别对与上述关节肌肉运动相关的电刺激电极贴片施加对应强度的电刺激;
C.通过固定在上肢各关节的角度传感器,实时感知各关节的相对角度;计算感知的相对角度与模型的相对角度的角度差,作为PID控制器的输入,PID控制器根据PID控制算法实时调整电刺激的强度,从而快速获得与虚拟上肢一致的动作。
步骤二中的运动意图检测,具体通过以下步骤:
A.在当前时刻,向前提取2秒EEG的信号,依次进行共同平均参考(common averagereference,CAR)滤波和8~30Hz的带通滤波;
B.将滤波后的EEG信号进行共同空间模式(Common spatial pattern,CSP)投影后作为特征向量;
C.将获得的特征向量输入到分类器(Bayes、SLda或SVM),得到预测的类和对应的输出值。如果预测的类别与想象任务的类别一致,那么将分类器的输出值作为运动想象的强度;如果类别不一致,那么患者当前无运动意图。
图1为本发明所述基于运动想象上肢运动康复治疗方法的流程图。患者在进行上肢运动康复治疗时,需要按系统提示执行60个trial的治疗任务。在每个治疗任务中,患者需要执行想象任务的时间为10秒。在限定的10秒内,系统每隔500毫秒依次进行如下操作:
一、对患者的EEG信号进行一次运动意图检测(运动想象强度为S
二、系统根据检测和预测的结果,对患者当前的脑控能力进行评估;
三、系统根据评估的结果,利用最优化方法,以同时降低任务失败的可能性和辅助程度为目标,计算出分配给患者控制和系统控制的最优权重k
四、将协同控制的结果S
如果患者在指定的10秒内完成了该次运动想象任务(例如,将手腕从平放升到与桌面水平面成60度夹角),系统将驱动功能电刺激设备对患者上肢相应的肌肉进行电刺激,促使其完成与虚拟上肢一致的动作,并保持该动作4秒;否则,将不施加电刺激给患者。
患者完成当前治疗任务后休息5秒,休息结束后将继续进行下一次同样的治疗任务,直至完成所有的治疗任务。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于运动想象上肢运动康复治疗方法
- 一种基于Kinect传感器的上肢运动康复训练系统及其训练方法