一种真空用多层晶圆支撑机构
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及半导体自动化装备中晶圆传输设备,特别涉及一种真空用多层晶圆支撑机构。
背景技术
现有晶圆支撑机构上下两层机构调平只能使用机械加工保证,机械件加工难度高,费用昂贵,成品率低,无法传输高温硅片。因此,急需一种能多自由度调整的多层耐高温晶圆支撑机构。
发明内容
针对上述问题,本发明的目的在于提供一种真空用多层晶圆支撑机构,以实现多自由度调整各层机构的平整度。
为了实现上述目的,本发明采用以下技术方案:
一种真空用多层晶圆支撑机构,包括升降横梁及设置于所述升降横梁两端且结构相同的第一晶圆支撑机构和第二晶圆支撑机构,所述第一晶圆支撑机构和第二晶圆支撑机构均为多层结构,并且协同作用可支撑多个晶圆。
所述第一晶圆支撑机构和所述第二晶圆支撑机构均包括支架垫片A、支架垫片B、晶圆支撑臂A、晶圆支撑臂B及晶圆支撑棒;
所述晶圆支撑臂A和晶圆支撑臂B由上至下依次设置于所述升降横梁的下方,所述晶圆支撑臂A和所述晶圆支撑臂B的两端均设有晶圆支撑棒;
所述支架垫片A设置于所述升降横梁和晶圆支撑臂A之间;所述支架垫片B设置于所述晶圆支撑臂A和晶圆支撑臂B之间;
所述升降横梁、支架垫片A及晶圆支撑臂A通过销轴定位螺钉与所述支架垫片B连接;
所述晶圆支撑臂B通过沉头螺钉与所述支架垫片B连接。
所述晶圆支撑臂A通过定位销与所述支架垫片B定位连接。
所述定位销为两个,所述晶圆支撑臂A上设有分别与两个所述定位销定位连接的圆形定位孔和腰形定位孔。
所述升降横梁上螺纹连接有两个顶丝A,两个顶丝A的端部与所述晶圆支撑臂A抵接,用于调整所述晶圆支撑臂A的水平度。
所述升降横梁、支架垫片A及晶圆支撑臂A上相对应的设有光孔,所述销轴定位螺钉依次穿过所述升降横梁、支架垫片A及晶圆支撑臂A上相对应的光孔,并且与所述支架垫片B螺纹连接。
所述晶圆支撑臂B上螺纹连接有两个顶丝B,两个所述顶丝B的端部与所述支架垫片B抵接,通过两个所述顶丝B调整所述晶圆支撑臂B的水平度。
所述晶圆支撑臂A和所述晶圆支撑臂B均为与晶圆的外圆周相适应的弧形结构。
所述晶圆支撑臂A和所述晶圆支撑臂B的两端均设有弹性开口,所述晶圆支撑棒插设于所述弹性开口内,并且通过螺钉将所述弹性开口锁紧。
所述晶圆支撑棒为石英棒。
所述升降横梁的两端均通过固定螺钉与外部升降机构连接,并且通过与所述升降横梁螺纹连接的调平顶丝调整所述升降横梁的水平度。
所述固定螺钉穿过所述升降横梁上设有的光孔,并且与所述外部升降机构螺纹连接。
本发明的优点及有益效果是:
本发明是改良了现有真空用多层晶圆机构,增加了多维度调整,可以保证机械加工件在一般精度的情况下通过调整机构使多层晶圆保证相对水平,使用耐高温材料以保证高温状态下整体机构的稳定性,与高温晶圆接触部分采用是低导热率的石英棒,保证与晶圆接触瞬间不会迅速降温使晶圆炸裂。
本发明降低了原晶圆支撑机构的机械加工精度,降低了加工成本,且提高了晶圆支撑机构的可维护性。
附图说明
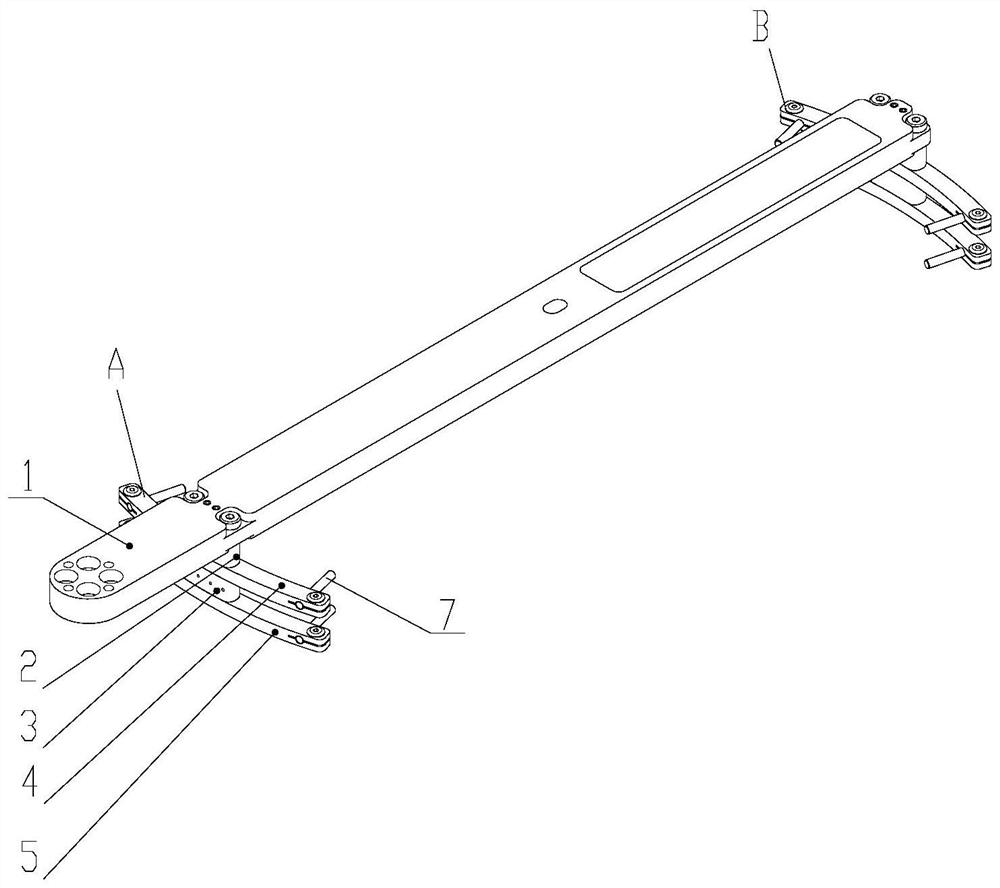
图1为本发明的结构示意图;
图2为本发明的局部剖视图;
图3为图2的A-A剖视图;
图4为本发明中升降横梁的局部结构示意图。
图中:A、第一晶圆支撑机构,B、第二晶圆支撑机构,1、升降横梁,2、支架垫片A,3、支架垫片B,4、晶圆支撑臂A,5、晶圆支撑臂B,6、螺钉,7、晶圆支撑棒,8、沉头螺钉,9、顶丝B,10、定位销,11、销轴定位螺钉,12、顶丝A,13、固定螺钉,14、调平顶丝,15、圆形光孔,16、腰形定位孔,17、圆形定位孔,18、腰形光孔。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1所示,本发明提供的一种真空用多层晶圆支撑机构,包括升降横梁1及设置于升降横梁1两端且结构相同的第一晶圆支撑机构A和第二晶圆支撑机构B,第一晶圆支撑机构A和第二晶圆支撑机构B均为多层结构,并且协同作用可支撑多个晶圆。
如图1-2所示,第一晶圆支撑机构A和第二晶圆支撑机构B均包括支架垫片A2、支架垫片B3、晶圆支撑臂A4、晶圆支撑臂B5及晶圆支撑棒7;晶圆支撑臂A4和晶圆支撑臂B5由上至下依次设置于升降横梁1的下方,晶圆支撑臂A4和晶圆支撑臂B5的两端均设有晶圆支撑棒7;支架垫片A2设置于升降横梁1和晶圆支撑臂A4之间;支架垫片B3设置于晶圆支撑臂A4和晶圆支撑臂B5之间;升降横梁1、支架垫片A2及晶圆支撑臂A4通过销轴定位螺钉11与支架垫片B3连接;晶圆支撑臂B5通过沉头螺钉8与支架垫片B3连接。
如图2所示,升降横梁1、支架垫片A2及晶圆支撑臂A4上相对应的设有光孔,销轴定位螺钉11依次穿过升降横梁1、支架垫片A2及晶圆支撑臂A4上相对应的光孔,并且与支架垫片B3螺纹连接。
升降横梁1上螺纹连接有两个顶丝A12,两个顶丝A12的端部与晶圆支撑臂A4抵接,用于调整晶圆支撑臂A4的水平度。晶圆支撑臂B5上螺纹连接有两个顶丝B9,两个顶丝B9的端部与支架垫片B3抵接,通过两个顶丝B9调整晶圆支撑臂B5的水平度。
本发明的实施例中,顶丝A12和顶丝B9为内六角顶丝。
进一步地,晶圆支撑臂A4通过定位销10与支架垫片B3定位连接。
如图3所示,本发明的实施例中,定位销10为两个,晶圆支撑臂A4上设有分别与两个定位销10定位连接的圆形定位孔17和腰形定位孔16,腰形定位孔16可以补偿定位孔的加盖误差。
如图3所示,本发明的实施例中,晶圆支撑臂A4上还设有分别用于两个销轴定位螺钉11穿过的圆形光孔15和腰形光孔18,腰形光孔18用于补偿光孔的加工误差。
如图2-3所示,晶圆支撑臂A4和晶圆支撑臂B5均为与晶圆的外圆周相适应的弧形结构。晶圆支撑臂A4和晶圆支撑臂B5的两端均设有弹性开口,晶圆支撑棒7插设于弹性开口内,并且通过螺钉6将弹性开口锁紧。
本发明的实施例中,晶圆支撑棒7为石英棒,用于高温晶圆的传输,保证与晶圆接触瞬间不会迅速降温使晶圆炸裂。
如图4所示,升降横梁1的两端均通过固定螺钉13与外部升降机构连接,并且通过与升降横梁1螺纹连接的调平顶丝14调整升降横梁1的水平度。固定螺钉13穿过升降横梁1上设有的光孔,并且与外部升降机构螺纹连接。
本发明的安装过程是:
支架垫片B3与晶圆支撑臂A4通过两个定位销10进行位置固定,销轴定位螺钉11穿过升降横梁1、支架垫片A2及晶圆支撑臂A4上的光孔与支架垫片B3旋紧,通过沉头螺钉8将晶圆支撑臂B5固定在支架垫片B3上;使用超短头的螺钉6与晶圆支撑臂A4、晶圆支撑臂B5连接将晶圆支撑棒7进行固定,将顶丝A12和顶丝B9装入对应位置。
工作原理:
本发明使用多组螺钉与顶丝的配合对晶圆支撑臂的姿态进行调整,同时通过不同定位销对晶圆支撑臂的位置进行了限制,简化调整难度。
首先,将晶圆支撑棒7通过螺钉7固定在各晶圆支撑臂A4及晶圆支撑臂B5上,先将两组晶圆支撑臂A4进行安装,通过调整四个顶丝A12保证同一层的四个晶圆支撑棒7在同一平面;
然后,安装晶圆支撑臂B5,通过调整四个顶丝B9将这层的四个晶圆支撑棒7调整在同一平面,且保证与上一层晶圆支撑棒7所处的平面平行。
晶圆支撑机构安装完成后,通过升降横梁1上的调平顶丝14及固定螺钉13与升降机构固定并调平。
本发明的工作过程是:
将上述晶圆支撑机构放置在300mm晶圆传输平台中的LL腔室中,可以在一次开关LL门阀的情况下完成两片晶圆的交换;
首先,将LL腔室靠近中央传输腔室的门阀打开,通过机械手将完成工艺的高温晶圆放置在晶圆支撑下层;放置完成后,晶圆支撑下降,将完成工艺的高温晶圆放置在冷却盘中进行冷却,关闭LL腔室靠近中央传输腔室的门阀,将LL腔室回填干燥氮气;待LL腔室到大气压力时,打开LL腔室靠近大气侧门阀,通过机械手将未进行工艺的晶圆放置在晶圆支撑上层,放置完成后,将晶圆支撑升起,机械手再将放置在晶圆支撑下层的冷却后的完成工艺的晶圆取走,晶圆取走后,晶圆支撑下降,关闭LL腔室靠近大气侧门阀,LL腔室进行抽气,待LL腔室与中央传输腔室压力一致时,打开LL靠近中央传输腔室侧的门阀打开,使用机械手将晶圆取走,完成LL腔室单次取放片过程。
本发明是改良了现有真空用多层晶圆机构,增加了多维度调整,可以保证机械加工件在一般精度的情况下通过调整机构使多层晶圆保证相对水平,使用耐高温材料以保证高温状态下整体机构的稳定性,与高温晶圆接触部分采用是低导热率的石英棒,保证与晶圆接触瞬间不会迅速降温使晶圆炸裂。
本发明降低了原晶圆支撑机构的机械加工精度,降低了加工成本,且提高了晶圆支撑机构的可维护性。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种真空用多层晶圆支撑机构
- 一种在无晶圆的真空反应腔内镀膜的方法及晶圆处理方法