用于智能仓储的运输堆料系统和方法
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及运输堆料技术领域,更具体的说是用于智能仓储的运输堆料系统和方法。
背景技术
进行物料卸载时物料沿着传送带向下自由落体运动后会堆成一座小山,很难自己向外散开,需要将物料堆顶部向外侧拨开,然后才能继续堆料,费时费力,如果不拨开,就会造成占地面积过高浪费资源,同时物料堆的过高会影响传送带,还需要对传送带的角度进行调节;
例如公开号CN104773525A该辅助堆料机构总成包括伸缩筒、定位机构、溜筒驱动机构,伸缩筒包括固定溜筒以及至少一节活动溜筒,固定溜筒通过定位机构定位于堆料臂,各节溜筒依次嵌套,溜筒驱动机构驱动各节活动溜筒伸缩,堆料皮带机的物料可经伸缩筒堆积于料场中;并且,定位机构可相对堆料臂的长度方向相对滑动,以便当伸缩筒处于全缩状态时,将伸缩筒移开堆料皮带机的物料出口;本发明可根据料堆高度调节各活动溜筒的伸出长度至合适位置,使得溜筒下出口与料堆顶点的距离实时保持在合理的高度内;该发明的缺点是不能够在物料下落时将物料均匀平铺。
发明内容
本发明的目的是提供用于智能仓储的运输堆料系统和方法,能够在物料下落时将物料均匀平铺。
本发明的目的通过以下技术方案来实现:
用于智能仓储的运输堆料系统,包括一个分散部,所述的分散部能够将物料均匀平铺。
所述的分散部能够在水平面上转动将物料均匀平铺。
所述的分散部包括底板、锥头和隔板,锥头和多个隔板均固定连接在底板上。
所一种用于智能仓储的运输堆料系统还包括收束部,收束部能够进行收束和展开。
所述的收束部包括收束杆和弹力布,多个收束杆转动带动弹力布收束和展开,控制物料的平铺范围,弹力布固定连接在多个收束杆上。
所述的弹力布为圆环形。
所述的一种用于智能仓储的运输堆料系统还包括阻挡板、滑动架和转动杆,转动杆的下端转动连接在滑动架上,转动杆的上端转动连接在阻挡板上多个阻挡板移动控制物料的传输速度。
所述的一种用于智能仓储的运输堆料系统还包括偏心轮、转动杆、齿条、震动杆、滤网和连接板,连接板固定在滤网上,转动杆的上端转动连接在偏心轮上,转动杆的下端转动连接在震动杆上,偏心轮和齿条啮合传动,震动杆在连接板上方上下移动。
所述的一种用于智能仓储的运输堆料系统还包括驱动部、支撑板和筒身,驱动部滑动连接在筒身上,底板转动连接在支撑板上,多个收束杆均铰接在筒身上,支撑板固定连接在筒身上,滤网固定连接在筒身上。
一种用于智能仓储的运输堆料系统进行堆料的方法,所述该方法包括以下步骤:
步骤一:物料落在底板上,底板转动带动多个隔板转动,使物料分散飞出;
步骤二:物料在进行分散后还会通过滤网进行过滤掉物料内大块的石子和垃圾,提高物料的质量;
步骤三:然后收束部进行收束,减小物料的分散距离,物料击打在收束部上然后落下,最后使物料铺满地面;
步骤四;每次在多个收束杆转动时还会带动震动杆击打连接板使连接板发生震动,将挂在滤网上的石子震落。
本发明用于智能仓储的运输堆料系统和方法的有益效果为:
本发明用于智能仓储的运输堆料系统和方法,使得物料能够平铺在地面上不会有尖部生成,避免整平物料堆顶部的过程,节省人力物力,提高工作效率,物料分散的更远,提高物料的分散面积,使得物料的覆盖面积更广,通过收束部来控制物料的分散距离,物料铺满地面,且平铺高度相同,能使平铺的物料高度更加均匀,相同占地面积下存储更多的物料,物料在进行分散后还会通过滤网进行过滤掉物料内大块的石子和垃圾,将挂在滤网上的石子震落,防止发生堵塞,使物料能够一直流畅流出,提高物料堆放效率。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
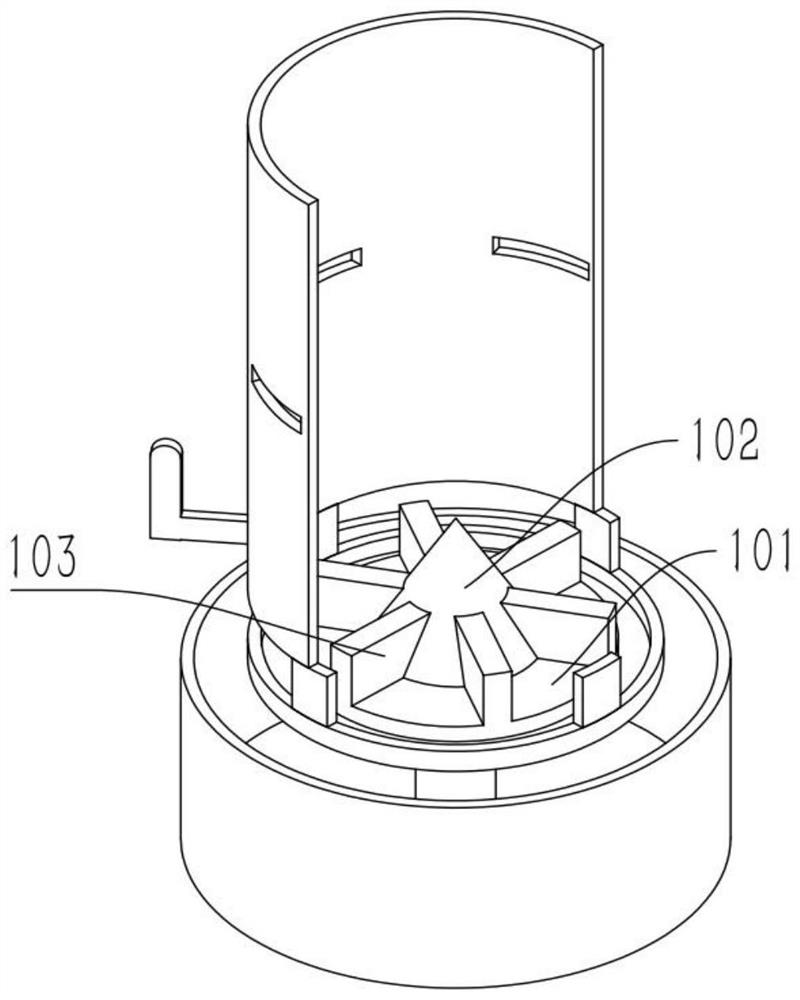
图1是本发明的用于智能仓储的运输堆料系统底板结构示意图;
图2是本发明的用于智能仓储的运输堆料系统弹力布结构示意图;
图3是本发明的用于智能仓储的运输堆料系统阻挡板结构示意图;
图4是本发明的用于智能仓储的运输堆料系统震动杆结构示意图;
图5是本发明的用于智能仓储的运输堆料系统滤网结构示意图;
图6是本发明的用于智能仓储的运输堆料系统移动环结构示意图;
图7是本发明的用于智能仓储的运输堆料系统筒身局部结构示意图。
图中:
底板101;
锥头102;
隔板103;
收束杆104;
弹力布105;
阻挡板106;
支撑板107;
偏心轮201;
转动杆202;
震动杆203;
滑动架301;
转动杆302;
移动环303;
齿条304;
滤网401;
垃圾箱402;
连接板403;
连接管501;
筒身502;
震动支架503。
具体实施方式
下面结合附图对本发明作进一步详细说明。
具体实施方式一:
下面结合附图详细说明第一个实施例,物料落在分散部上分散部转到将物料均匀洒出,使得物料能够平铺在地面上不会有尖部生成,避免整平物料堆顶部的过程,节省人力物力,提高工作效率,物料落在锥头102上能够直接分散在底板101上,落在底板101上多个隔板103之间,底板101转动带动多个隔板103转动,多个隔板103转动通过离心力将多个隔板103之间的物料甩出,多个隔板103转动能使底板101上的物料分散的更远,避免物料直接落在地面上堆积成锥形,提高物料的分散面积,使得物料的覆盖面积更广,将物料甩出后物料铺在地面上,免去了需要对物料顶端进行整平的过程,能过一直进行物料的卸载和堆积,底板101转动通过外部动力源驱动,该动力源选用电机,电机固定在支撑板的下端。
具体实施方式二:
下面结构附图说明装置的第二实施例,分散部转到将物料均匀洒出,通过收束部来控制物料的分散距离,收束部不会对分散部转到将物料均匀洒出造成影响,物料被甩出后会先飞到最远距离,在飞散到的最远距离处进行堆积,会先堆积成圆环状,然后收束部进行收束,减小物料的分散距离,物料击打在收束部上然后落下,物料通过收束部的阻挡,使得物料的分散距离减小,随着收束部不断的进行收束,物料会一圈一圈的进行堆积,最后使物料铺满地面,且平铺高度相同,能使平铺的物料高度更加均匀,相同占地面积下存储更多的物料,多个收束杆104向内转动带动弹力布105转动,从而改变弹力布105的锥度。
具体实施方式三:
下面结合附图说明装置的第三实施例,弹力布105的锥度变小后,物料击打在弹力布105下落分散的面积就会变小,进行平铺的速度就会变快,难以控制收束部的收束速度,造成甩出的物料堆积效率不同,依然会产生物料堆积成圆锥状,从而造成物料的均匀平铺没有效果,通过弹力布105收束会带动多个阻挡板106向内移动,从而改变物料的下落速度,让物料甩出距离变小的同时减慢下料的速度,这时就能更好的将物料铺满地面,使得物料进行平铺的速度始终相同,更好进行控制和调节。
具体实施方式四:
根据说明书附图说明装置的第四实施例,物料在进行分散后还会通过滤网401进行过滤掉物料内大块的石子和垃圾,提高物料的质量,有效的将物料中的垃圾过滤和清除,在过滤过程中还会有石子和垃圾堵塞住滤网401,为了防止有石子和垃圾堵塞滤网401,造成物料不能正常的进行过滤,甚至被堵住的滤网影响,无法被甩出导致堵在装置内,造成装置受损,同时影响工作速度,每次在多个收束杆104转动时还会带动震动杆203击打连接板403,使连接板403发生震动,连接板403发生震动带动滤网401震动,将挂在滤网上的石子震落,防止发生堵塞,使物料能够一直流畅流出,提高物料堆放效率。
具体实施方式五:
根据说明书附图说明装置的第五实施例,所述的用于智能仓储的运输堆料系统还包括滑动架301和转动杆302,转动杆302的下端转动连接在滑动架301上,转动杆302的上端转动连接在阻挡板106上,多个收束杆104的上端分别滑动连接在多个滑动架301上。
多个滑动架301上下移动分别带动多个转动杆302转动,多个转动杆302转动分别带动多个阻挡板106移动,多个滑动架301向上移动分别带动多个阻挡板106向内移动,多个滑动架301向下移动分别带动多个阻挡板106向外移动。
所述的用于智能仓储的运输堆料系统还包括偏心轮201、转动杆202和齿条304,转动杆202的上端转动连接在偏心轮201上,转动杆202的下端转动连接在震动杆203上,偏心轮201和齿条304啮合传动。
齿条304移动带动偏心轮201转动,偏心轮201转动带动转动杆202转动,转动杆202转动带动震动杆203上下移动,震动杆203上下移动对连接板403进行击打。
所述的用于智能仓储的运输堆料系统还包括垃圾箱402,垃圾箱402固定连接在滤网401的下端。
被滤网401过滤出的石子或垃圾会直接掉落在垃圾箱402内,防止石子或垃圾二次落入物料堆内,这样被过滤的石子和垃圾就会直接被收集,提高物料的质量,还方便对石子或垃圾进行收集和清理。
所述的用于智能仓储的运输堆料系统还包括移动环303,多个滑动架301均固定连接在移动环303上,齿条304固定连接在移动环303上。
移动环303上下移动带动多个滑动架301上下移动,移动环303上下移动带动齿条304上下移动,多个滑动架301上下移动带动多个收束杆104转动,多个收束杆104转动就会带动弹力布105的形状发生改变,移动环303通过外部动力源驱动,该动力源可以选用气缸或油缸,该动力源固定连接在筒身502上。
所述的用于智能仓储的运输堆料系统还包括连接管501和震动支架503,筒身502滑动连接在连接管501上,多个阻挡板106均滑动连接在筒身502上,震动支架503固定连接在筒身502上,底板101转动连接在支撑板107上,多个收束杆104均铰接在筒身502上,支撑板107固定连接在筒身502上,滤网401固定连接在筒身502上,偏心轮201转动连接在震动支架503上,震动杆203滑动连接在震动支架503上,移动环303滑动连接在筒身502上,筒身502上设有多个通孔,用于阻挡板106通过。
可以根据物料量和占地面积大小来调整装置的工作高度,先将连接管501固定在传送带的出料端,物料通过传送带落在连接管501内,在通过连接管501落到筒身502内,移动筒身502调节整体工作高度,筒身502移动就会改变整体的工作高度,多个阻挡板106向内滑动即可改变筒身502内部横截面积,从而调节物料的流速。
需要注意的是上述实施例之间可以相互拼接使用,也可以全部结合在一起进行使用。
一种用于智能仓储的运输堆料系统进行堆料的方法,所述该方法包括以下步骤:
步骤一:物料落在底板101上,底板101转动带动多个隔板103转动,使物料分散飞出;
步骤二:物料在进行分散后还会通过滤网401进行过滤掉物料内大块的石子和垃圾,提高物料的质量;
步骤三:然后收束部进行收束,减小物料的分散距离,物料击打在收束部上然后落下,最后使物料铺满地面;
步骤四;每次在多个收束杆104转动时还会带动震动杆203击打连接板403使连接板403发生震动,将挂在滤网上的石子震落。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 用于智能仓储的运输堆料系统和方法
- 用于智能仓储系统的定位系统及智能仓储方法