同步万向节
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及一种同步万向节,包括:具有纵向中心轴线和多个在外周上的球滚道的万向节内部件,具有纵向中心轴线和多个在内周上的球滚道的万向节外部件,其中,万向节内部件上的球滚道和万向节外部件上的球滚道分别形成球滚道对,所述同步万向节还包括每个球滚道对各一个球用于传递扭矩,和布置在万向节外部件和万向节内部件之间并且具有窗口的笼架,球容纳在所述笼架中。
背景技术
在机动车的前桥半轴上,使用优选具有不倾斜的球滚道的RF/UF型万向节作为车轮侧的同步万向节,所述RF/UF型万向节在转向回转方面实现了大于40°的偏转角,其中,实现了约48°至52°的最大偏转角。笼架在万向节外部件和万向节内部件的弯曲的壁区段上导引,所述壁区段分别构成笼架导引部。
在万向节偏转时,球通过笼架保持在万向节中心平面中,所述万向节中心平面在万向节外部件和万向节内部件的在万向节偏转时彼此成角度的纵向中心轴线之间在所述纵向中心轴线的交叉点上作为对称平面张开。每个球滚道对的球滚道的球滚道中心的走向通常在任意的偏转角中都相对于万向节中心平面彼此镜像对称,所述走向在下文中也被称为滚道母线。在此,球滚道中心或者滚道母线理解为球的中心点在沿着相应的球滚道移动时产生的曲线。镜像对称在Seherr-Thoss,Schmelz,Auktor的相关设计理论:Gelenke undGelenkwellen,ISBN 3-540-41759-1,第60页中由同步要求作为条件推导出。通常力求达到的是,以相对较低的间隙并且在必要时保持可能由于运行作用力产生的移动尽可能精确地定位相关构件,以便实现球滚道相对于球平面的镜像对称。尽管付出了种种努力,但这种类型的传统的同步万向节并未显示出精确的同步。原因在于制造公差、摩擦和从外部作用的力。然而,与理想同步的通常偏差在万向节使用领域中不会对功能造成显著的负面影响,并且在实践中难以察觉。
为了确保同步万向节的功能,当万向节偏转时,球被调整到万向节中心平面中。为此已知不同的控制系统。如专利文献DE 22 52 827 A所述,第一种控制系统基于万向节外部件和万向节内部件上的球滚道的曲率中心相对于万向节偏转中心的相反的轴向偏移。如专利文献US 1,975,758所示,第二种控制系统使用笼架与万向节内部件以及笼架与万向节外部件之间的球形导引面的曲率中心的轴向偏移。此外,例如专利文献DE 30 00 119 A所公开的,两种控制系统、即滚道偏移和笼架偏移可以相互组合。球滚道的走向可以沿着圆弧或者也可以具有其它的弯曲形状以及局部笔直的区段。
为了即使在例如在前桥上在Rzeppa型的轮侧的同步万向节中那样出现中等和较大偏转角的情况下也能进行充分的控制,需要足够大的基本控制角和并且因此需要相对较大的轴向偏移来避免声学干扰、噪音或者甚至卡住。然而这在主运行偏转角范围中、即在偏转角较小时在万向节中导致高的轴向力分量并且相应地导致高的内摩擦力,由此不利地影响万向节的效率。
例如专利文献EP 0 802 341 B2所述,最近的解决方案在于减少滚道偏移,与之相结合地将球的数量从通常的六个增加到八个,以及在按照专利文献DE 100 60 119 A1的所谓反向轨道万向节中,与经典的Rzeppa型万向节不同地,使球滚道对的张角的定向从球滚道到球滚道交替地变化。增加球的数量可在即使控制角度很小的情况下仍确保万向节构件彼此之间的充分定位。而在反向轨道万向节上则应当尽可能地补偿作用在笼架上的轴向力。
然而这种万向节构造形式在制造技术上是非常耗费的。然而在没有备选方案的情况下,这一缺点迄今仍被忍受。
除了效率之外,球滚道的耐磨性是对同步万向节的要求的另一个核心点。然而这一要求往往与良好的效率相冲突。这例如可以在Rzeppa型的同步万向节中根据来自滚道偏移的控制作用的提高的效果得以解释。如前所述,可以减少滚道偏移,以通过减少支撑力来改善效率。然而,在运行这种同步万向节时,随着偏转角增大,根据各个单独的球滚道所处的位置,所述球滚道的载荷传递份额的不均匀分布增加。部分原因是由于这些滚道对相对于彼此的位置以及通过相应的球形成的力传递的有效调节角度。随着偏转角的增加,根据旋转位置,滚道的角位置的差异在任何情况下都会增加。由于偏转造成的差异的比率随着优选为所有滚道共有的来自滚道偏移的基本控制角的增加而减小并且有助于改善磨损特性,然而因此与效率的提高存在一定的矛盾。
发明内容
本发明所要解决的技术问题在于提供一种补救措施。本发明所要解决的技术问题尤其在于,在开篇所述类型的同步万向节中在制造耗费和制造成本较低的情况下进一步改善效率、使用寿命和控制。
该技术问题通过一种同步万向节解决。按照本发明的同步万向节包括:具有纵向中心轴线和多个在外周上的球滚道的万向节内部件,具有纵向中心轴线和多个在内周上的球滚道的万向节外部件,其中,万向节内部件上的球滚道和万向节外部件上的球滚道分别形成球滚道对,所述同步万向节还包括每个球滚道对各一个球用于传递扭矩,和布置在万向节外部件和万向节内部件之间并且具有窗口的笼架,球容纳在所述笼架中。此外,在按照本发明的同步万向节中规定,针对至少一个滚道对:
-在球滚道中导引的球的中心点的曲线的走向定义了滚道对的万向节内部件和万向节外部件的球滚道的相应的滚道母线L
-偏转平面E定义为通过球滚道对的两个纵向中心轴线A
-通过中心点O与偏转平面E垂直的、平分所述纵向中心轴线A
-万向节中心平面S被定义为垂直于角平分面WH并且纵向中心轴线A
-角平分面WH与偏转平面E的相交线被定义为参考轴线A,
-万向节内部件的滚道母线L
-万向节外部件的滚道母线L
其中,球滚道对的至少一个球滚道的第一和第二角φ
|dφ(β)=φ
具有大于0.3°至最大5°的值。
在按照本发明的解决方案中,有意地放弃了至少一个滚道对的球滚道的镜像对称的设计,方式为至少针对运行偏转角范围的局部区段,有针对性地调节在相应的取决于偏转角的、与万向节中心平面的交叉点中滚道切线与参考轴线的角的偏差,所述角的偏差明显超出了在镜像对称设计中即使考虑到最大常规制造公差时所能达到的范围。在这方面,本发明在同步万向节的设计领域中开辟了新的技术天地。
根据设计,由此可以对球在滚道中的包裹、球滚道中的压力控制和压力关系产生积极影响。
按照本发明的解决方案使得在同步万向节的整个使用范围内产生了效率和使用寿命的改善。由此尤其在偏转角较大的情况下改善了适用性。
球和球滚道上更均匀的力分布以及在万向节中心平面中对球的控制的改善在此可以成为优化的目标量。
此外可以进一步减少与理想的同步运行的偏差。
由于通过按照本发明的解决方案可以省去增加万向节中的球的数量或者省去反向的球滚道的耗费制造,因此制造耗费保持得较低。相对于传统的Rzeppa型同步万向节未产生显著的制造技术上的额外耗费。
优选地,第一和第二角φ
按照另一种特殊的实施方式,万向节内部件和/或万向节外部件上的球滚道的滚道母线均具有过渡到笔直区段中的弯曲区段。由此能够实现UF型的同步万向节。
万向节内部件上的球滚道的滚道母线可以在所述万向节内部件的径向平面中延伸和/或万向节外部件上的球滚道的滚道母线可以在所述万向节外部件的径向平面中延伸。然而球滚道的倾斜位置也是可行的,从而球滚道相对于径向平面成角度地延伸。
原则上,万向节内部件和万向节外部件上的连续的滚道的所有可以考虑的组合都是可行的,这使得产生|dφ(β)|
按照一种特殊的实施方式,球滚道的在万向节内部件和/或万向节外部件上的滚道母线具有曲率不同的区段。因此例如可以针对滚道母线将具有不同曲率的两个局部区段与一个笔直的局部区段组合。
此外,万向节内部件和万向节外部件上的曲率可以不同。
万向节内部件和万向节外部件上的滚道母线的不同曲率例如可以如下实现,即万向节内部件和万向节外部件上的球滚道的滚道母线的曲率中心可以在径向上彼此错开。
此外可以为此规定,万向节内部件和万向节外部件上的球滚道的滚道母线的曲率中心相对于笼架中心K具有不同的轴向偏移AK
AK
在下文中,为了清楚和更好地理解,始终参照该总的偏移量AK
按照另一种特殊的实施方式,万向节内部件的节圆直径PCD
按照另一种特殊的实施方式,为了实现适宜的滚道曲率规定,万向节内部件上的球滚道的滚道母线的曲率中心相对于笼架中心K的轴向偏移AK
按照另一种特殊的实施方式,为了实现适宜的滚道曲率规定,万向节内部件上的球滚道的滚道母线的曲率中心相对于万向节内部件的纵向中心轴线的径向偏移RO
如已经提到的,滚道母线也可以由两个或者多个具有不同曲率的局部区段构成,由此可以实现调节dφ(β)的变化曲线的高度灵活性。
在一个变型实施方案中,球滚道对的一个球滚道的滚道母线具有具备第一曲率半径R
R
此外,与之相关地,万向节内部件上的滚道母线的第一弯曲局部区段的曲率中心相对于笼架中心K可以具有轴向偏移AK
AK
备选地或者附加地,与之相关地,万向节内部件上的滚道母线的第一弯曲局部区段的曲率中心相对于笼架中心K可以具有径向偏移RO
RO
按照另一种特殊的实施方式,dφ(β)在大程度的负偏转角β<-40°的区域中的变化曲线可以最初具有大程度的负的角差dφ并且从那里随着偏转角β的增加而增大。偏转角在此这样计入,使得在滚道母线与镜像对称平面S相交时,正的偏转角β与球滚道的下述侧对应,在万向节伸展的位置(β=0°)中所产生的球的控制力的作用方向朝向该侧。
可选地,dφ(β)在偏转角-30°<β<-10°的中等负范围内的变化曲线可以变为dφ(β)的正范围,接着在5°<β<15°的小程度的正范围内达到dφ(β)的正值的最大值。
随着偏转角β的继续增大,dφ(β)的变化曲线可以从偏转角5°<β<15°的小程度正范围平均比之前上升时更快地又下降到0°的dφ(β),以便在偏转角β的进一步增加过程中保持dφ(β)的最大+/-0.2°的值。
附图说明
以下根据附图所示的实施例详细阐述本发明。在附图中:
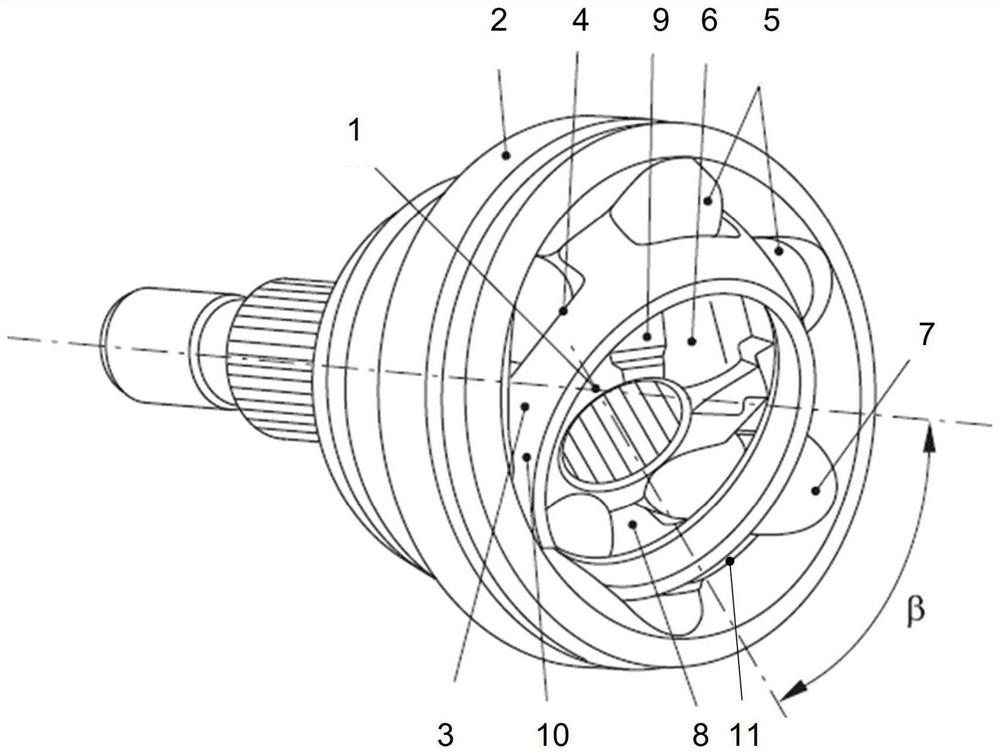
图1示出了按照本发明的一种实施例的同步万向节在闭合状态中的外部视图,
图2示出了用于说明dφ(β)的确定的示意图,
图3示出了UF型(无底切)的传统Rzeppa同步万向节的球滚道对的滚道母线的示意图,
图4示出了按照本发明第一实施例的同步万向节的球滚道的滚道母线的示意图,
图5示出了按照本发明第二实施例的同步万向节的球滚道的滚道母线的示意图,
图6示出了用于说明Rzeppa型的传统同步万向节的dφ(β)变化曲线的图表,
图7示出了对应于图6的图表,以说明按照本发明的同步万向节与传统的同步万向节的参数范围相比的dφ(β)的变化曲线,并且
图8示出了用于阐述节圆直径PCD
具体实施方式
图1的实施例示例性地示出了形式为UF型(无底切)的Rzeppa固定万向节的同步万向节。
同步万向节1例如可以安装在机动车的万向节轴中,以将来自变速器的驱动力传递到导向的车辆前轮。所述同步万向节允许40度以上至高达约52度的最大偏转角。
如图1所示,同步万向节1首先包括万向节内部件1和万向节外部件2。在万向节内部件1和万向节外部件2之间布置有具有多个窗口4的笼架3。在每个窗口中布置有球5。
万向节内部件1在其外周上具有多个槽状的球滚道6。在万向节外部件2的内周上以相同的方式构造有与万向节内部件1的球滚道6相互对置的多个槽状的球滚道7,以便构成相应的球滚道对。球滚道对6/7分别容纳用于在万向节内部件1和万向节外部件2之间传递扭矩的球5。
在图1中示例性地示出的同步万向节1中,所有球滚道对6/7的张角朝向同步万向节1的开口侧,即所有球滚道对6/7朝向同步万向节1的同一侧敞开。
所有球滚道对6/7都可以以相同的方式设计,因此总体上存在唯一的滚道系统。
球滚道对6/7的数量并且由此球5的数量优选为六个,但也可以选择得更多或者更少、例如可以是七个或者八个。
万向节内部件1的球滚道6例如可以在包括万向节内部件1的纵向中心轴线A
万向节外部件2的球滚道7例如可以在包括万向节外部件2的纵向中心轴线A
所述球滚道的滚道母线L
在球滚道6和7之间,万向节内部件1以及万向节外部件2具有用于导引笼架3的壁区段。
在所示实施例中,笼架3通过基本上呈球形的内表面8在万向节内部件1的笼架导引面9上滑动,并且通过基本上呈球形的外表面10在万向节外部件2的笼架导引面11中滑动。万向节内部件1和万向节外部件2上的笼架导引面9和11同样可以球形地设计。由于笼架导引面9和11的曲率,笼架3被轴向锁定在万向节内部件1和万向节外部件2之间,然而是可以枢转的。只要保持笼架3的导引,则笼架3的球形的内表面8和外表面10以及笼架导引面9和11可以偏离球形的形状。然而,为了尽可能精确地相互定位,考虑到不可避免的制造公差,建议将每对中的至少一个接触表面设计为球形。
当同步万向节1偏转时,通过笼架3使球5保持在其万向节中心面S内。该万向节中心平面S同时代表万向节内部件1和万向节外部件2的纵向中心轴线A
按照本发明,在图1所示的同步万向节1中,通常设置在这种万向节中的针对至少一个滚道对6/7、尤其是其子组合,或者针对所有滚道对6/7的镜像对称造型以下面参照图2至图5阐述的方式方法舍弃。
由此可以在保持简单的滚道走向的情况下实现能够成本低廉地制造的同步万向节1,该同步万向节相对于现有技术在效率、使用寿命和控制方面得到改善。
为此首先根据图2定义和阐述对于本发明的理解重要的几何量。图2在下半部分中示意性地示出了同步万向节1的在纵向中心轴线A
在图2中,滚道母线L
万向节内部件1和万向节外部件2的纵向中心轴线A
角平分面WH被定义为与偏转平面E垂直并且通过交点或者中心点O,所述角平分面平分内部件和外部件的纵向中心轴线A
此外,由图2下部分可知,上文已经提到的万向节中心平面S是下述平面,所述平面垂直于角平分面WH并且同步万向节1的内侧和外侧的纵向中心轴线A
现在,将通过角平分面WH与偏转平面E的相交线产生的轴线定义为参考轴线A。
观察图2上半部分,在那里,万向节内部件1的滚道母线L
在图2上部,φ
在不考虑通常的制造公差的情况下,在球滚道对的球滚道6和7的镜像对称的设计方案中,第一角φ
在球滚道6和7以及相应的滚道母线L
然而,在按照本发明的设计方案中,与至少一个球滚道6或7的偏转角β相关的角差变化曲线的数量最大值|dφ(β)|
0.6°至3°的|dφ(β)|
对球滚道对的球滚道6和7的对称条件的相关的舍弃开辟了新的设计可行性。根据设计,由此例如可以对球5在球滚道6和7中的包裹、球滚道6和7中的压力控制和压力关系产生积极影响。
这又实现了在效率和使用寿命上的改进。
在设计按照本发明的同步万向节1时应注意的是,万向节中的球滚道走向和间隙、尤其是滚道宽度、节圆直径PCD或者万向节内部件1和万向节外部件2的导引面使球5能够停留在滚道交点中。球滚道6和7之间的具有较小的自由空间的位置可以在万向节中的其他位置处通过更多的自由空间来补偿。由此确保了同步万向节1的可移动性。
为了避免同步万向节1卡住,球滚道6和7之间的球5的理论上不利的自由空间不应当超过其它导引面中最大可能的构件位移的大小。
图4示出了球滚道对6/7的滚道母线L
在所示实施例中,万向节内部件1和万向节外部件2上的球滚道6和7的滚道母线L
如图4所示,滚道母线L
此外,万向节内部件1和万向节外部件2上的球滚道的滚道母线L
万向节内部件1上的球滚道6的滚道母线L
此外,万向节内部件1和万向节外部件2上的球滚道6和7的滚道母线L
万向节内部件1上的球滚道6的滚道母线L
万向节外部件7上的弯曲的滚道区段的滚道母线L
图4仅示例性地示出了简单球滚道走向以说明和阐述可行性。然而,原则上,可以在具体的设计方案中选择万向节内部件1和万向节外部件2上的产生已经描述的|dφ(β)|
图5示例性地示出了球滚道对6/7的滚道母线L
在该变型设计方案中,万向节内部件1上的滚道母线L
万向节外部件2的滚道母线L
R
万向节内部件1的具有不同曲率半径R
AK
此外,在此也可以可选地设置径向偏移,方式为万向节内部件1上的球滚道6的滚道母线L
RO
在此也可以至少在偏转角β的局部区域上对于角差dφ(β)达到上述值。
图7示出了角差dφ(β)与偏转角β相关的示例性的变化曲线。偏转角在此这样计入,使得在滚道母线L
图7示出了dφ(β)的基于上述β定向的变化曲线,其中,在大程度的负偏转角β(β<-40°)的区域中首先存在dφ的大程度的负值。dφ的值从那里随着偏转角β的增大而增大,从而在偏转角β的中等负范围(-30°<β<-10°)中变化到dφ的正范围,并且接着在偏转角β的小程度正值的范围中(5°<β<15°)达到dφ的正值的最大值。
随着偏转角β继续增大,dφ的值平均比之前上升时更快地下降到dφ的0°值,以便在偏转角β的进一步增加过程中与之前描述的变化曲线相比dφ值保持在0°的值附近、优选保持在+/-0.2°的范围中。
与图6相比示出,在图7中实现的角差dφ(β)远超Rzeppa型的传统同步万向节1即使在最不利的公差条件下也能实现的极限。然而应当强调的是,图7所示的变化曲线dφ(β)仅为示例性的。尤其可以不同地选择|dφ(β)|
图1所示的同步万向节1设计为固定万向节。然而按照本发明的方案可以相同地在伸缩万向节中使用。
此外,图1所示的实施例中的所有滚道对都相同地设计。然而按照本发明的方案也可以选择性地应用于单独的滚道对或者选择性地应用于滚道对的分组。换言之,在按照本发明的同步万向节1中,除了前述类型的滚道对之外也可以设置具有其它的、与之不同的设计的滚道对。
此外,在图1所示的实施例中,所有滚道对朝向相同的一侧敞开。然而也可行的是,将按照本发明的方案应用于沿相反方向敞开的滚道对。按照本发明的方案尤其也可以应用于反向轨道万向节的相反的滚道系统中。
以上根据实施例和其它变型方案对本发明进行了详细阐述。所述实施例和变型方案用于证明本发明的可实施性。即使没有明确描述,只要在技术上是可能的,那么在上文中在其它单独特征的上下文中解释的单独的技术特征也可以独立于这些单独特征地以及与其它单独特征组合地实现。因此,本发明无疑并不局限于具体描述的实施例,而是包括由权利要求书限定的所有设计方案。
附图标记列表
1 同步万向节;万向节内部件
2 万向节外部件
3 笼架
4 笼架窗口
5 球
6 万向节外部件上的球滚道
7 万向节内部件上的球滚道
8 笼架的球形的内表面
9 万向节内部件上的笼架导引面
10 笼架的球形的外表面
11 万向节外部件上的笼架导引面
dφ 第一角和第二角的差
a 第一弯曲局部区段
b 第二弯曲局部区段
A 参考轴线
A′ 参考轴线,移位的
A
A
AK
AK
AK
AK
E 偏转平面
K 笼架中心=K
K
K
L
L
O 交点(中心点)
PCD
PCD
R
R
R
R
RO
RO
RO
S 万向节中心平面
T
T
WH 角平分面
β 偏转角
φ
φ
- 用于VL万向节和CG万向节的球保持架
- 具有完整的万向节内件的同步万向节及其制造方法
- 用于制造用于球式同步万向节的保持架的方法