一种智能锁的联锁控制方法及其智能锁
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及智能锁技术领域,特别是涉及一种兼具安全性和方便性的一种功能可选择性的智能锁。
背景技术
传统的锁具为机械锁或电子锁,机械锁相对电子锁安全性高,但需带钥匙及操作复杂的缺点,电子锁相对机械锁方便性好,但存在安全性低的缺点。最近推出的智能锁通常配有电子锁系统和机械锁系统,电子锁系统作为开关锁的主要方式,机械锁系统作为配套备用使用,在电子锁系统无法使用时,可采用钥匙通过机械锁系统实现开关锁。而现有的智能锁的电子锁系统和机械锁系统是两个各自独立的系统,各自都可以控制智能锁的关锁或开锁,机械锁具有安全性高,但操作复杂的缺点;电子锁具有方便性好,但是安全性低的特点(比如采用密码输入、刷卡感应输入等方式);只要破解了电子锁系统或机械锁系统的其中一种就能轻易开锁,因此,现有的智能锁没有兼顾安全性和方便性,存在方便性好,但安全性低的缺点。
发明内容
本发明的目的在于克服现有技术之不足,提供一种智能锁的联动控制方法及其智能锁,联锁控制是机械锁和电子锁的联动关系,不是机械锁和电子锁并行可各自独立运行,使得智能锁能够兼具有安全性和方便性功能可选择性的智能锁,智能锁包括电子锁系统、机械锁系统和锁体系统,通过机械锁系统优先联动控制电子锁系统,使电子锁系统中的开关锁机构处于可工作状态或不可工作状态,防盗性能得到进一部的提高。用户可根据自己某个时间段的需求选择设置安全性或方便性功能。如用户要出远门,长时间家里没人,这时,就需要安全性高的智能锁保证家里财产不被偷;如用户只是短时间外出或家里一直有人,这时就需要方便性好的智能锁。
本发明解决其技术问题所采用的具体技术方案是:一种智能锁的联锁控制方法,包括:
电子锁系统的开关锁步骤;该步骤是利用电子锁系统对锁体系统进行控制,使锁体系统执行开锁或关锁的动作;
机械锁的开关锁步骤;该步骤是利用机械锁系统对锁体系统进行控制,使锁体系统执行开锁或关锁的动作;
还包括机械锁系统联动控制电子锁系统,其控制步骤是通过机械锁系统的动作,使电子锁系统中的开关锁机构处于可工作状态或不可工作状态。
机械锁系统联动控制电子锁系统的开关锁机构处于不可工作状态时,电子锁系统处于开锁状态。
机械锁系统优先联动控制电子锁系统,机械锁系统处于独立工作状态或非独立工作状态;
当机械锁系统处于状态时,通过机械锁系统对电子锁系统的控制,电子锁系统的开关锁机构处于不可工作状态;此时智能锁进入安全模式;
当机械锁系统处于非独立工作状态时,通过机械锁系统对电子锁系统的控制,电子锁系统开关锁机构处于可工作状态;此时智能锁进入方便模式。
所述机械锁系统对电子锁系统的控制步骤是在电子锁系统设机械开关或电子开关,用来控制电子锁系统的开关锁机构,使电子锁系统的开关锁机构处于可工作状态或不可工作状态,并且利用钥匙的动作直接或间接地触动机械开关或电子开关的开或关,从而实现机械锁系统对电子锁系统的控制。
所述钥匙的动作间接地触动或联动机械开关或电子开关的开或关是由钥匙的转动通过联动件或锁芯触动机械开关或电子开关的开或关。
还包括电子锁系统设置按钮或旋钮,通过按钮或旋钮控制电子锁系统中的开关锁机构处于可工作状态或不可工作状态。
所述电子锁系统的开关锁机构的不可工作状态是指电子锁系统内的电机的供电被切断或者是通过离合器使电机的输出成空转或限制电机转动或电子开关信号控制电机停止转动。
进一步的,还包括显示和/或提示步骤,智能锁通过增设显示模块和/或提示模块来显示或提示智能锁是处于机械锁工作状态还是电子锁工作状态。
当机械锁系统处于独立工作状态时,通过机械锁系统对电子锁系统的控制,电子锁系统的开关锁机构处于不可工作状态,智能锁显示或提示处于机械锁工作状态,此时智能锁进入安全模式。
当机械锁系统处于非独立工作状态时,通过机械锁系统对电子锁系统的控制,电子锁系统的开关锁机构处于可工作状态,智能锁显示或提示处于电子锁工作状态,此时智能锁进入方便模式。
所述机械锁的开关锁步骤,包括:
采用钥匙基于弹子锁结构特征进行开锁或关锁的步骤;和/或
采用钥匙基于叶片锁结构特征进行开锁或关锁的步骤。
所述电子锁的开关锁步骤,包括:
利用指纹识别输入、静脉识别输入、人脸输入、声控输入、数字键盘密码输入、刷卡感应输入、遥控器输入、远程APP系统密码输入或者其它已公开的电子锁的密码形式输入进行开锁或关锁的步骤。
一种智能锁,是使用如上所述的智能锁的联锁控制方法。
与现有技术相比较,本发明的有益效果是:
本发明由于采用了一种智能锁的联锁控制方法,该方法包括:电子锁系统的开关锁步骤;该步骤是利用电子锁系统对锁体系统进行控制,使锁体系统执行开锁或关锁的动作;机械锁系统的开关锁步骤;该步骤是利用机械锁系统对锁体系统进行控制,使锁体系统执行开锁或关锁的动作;还包括机械锁系统优先对电子锁系统的控制步骤;该步骤是通过机械锁系统的动作,使电子锁系统中的开关锁机构处于可工作状态或不可工作状态;该智能锁的联锁控制方法,使得智能锁兼具有安全性和方便性的一种功能可选择性的智能锁,防盗性能得到进一步的提升,用户可根据自由需求选择安全性或方便性功能;在一个智能锁里头,把机械锁和电子锁柔和在一起,并通过机械锁的联动优先控制电子锁,即通过机械锁使用联动选择安全性较高的机械锁系统或选择方便性较高的电子锁系统。
以下结合附图及实施例对本发明作进一步详细说明;但本发明的一种智能锁的联锁控制方法及其智能锁不局限于实施例。
附图说明
图1是本发明的智能锁的实施例一的主视图(门外);
图2是本发明的智能锁的实施例一的后视图(门内);
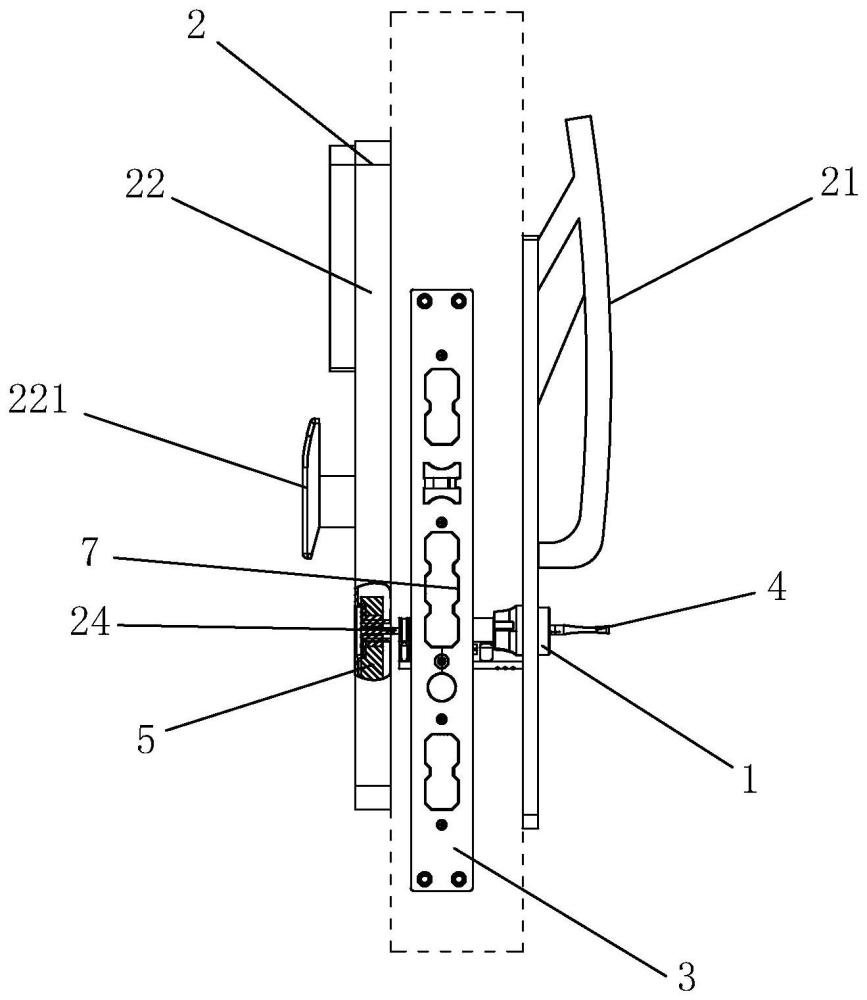
图3是本发明的智能锁的实施例一的侧视图;
图4是本发明的智能锁的实施例一的机械锁系统及其锁体系统的结构示意图;
图5是本发明的智能锁的实施例一的机械锁系统和钥匙的配合示意图一;
图6是本发明的智能锁的实施例一的机械锁系统的示意图;
图7是本发明的智能锁的实施例一的电子锁系统及其锁体系统的结构示意图;
图8是本发明的智能锁的实施例一的电子锁系统所采用连接件、拨叉等的示意图;
图9是本发明的智能锁的实施例一的电子锁系统所采用拨叉等的示意图;
图10是本发明的智能锁的实施例一的结构示意图(触发开关状态);
图11是图10中的A部放大示意图;
图12是锁舌的结构示意图;
图13是本发明的智能锁的实施例一的机械锁系统对电子锁系统的控制方式一的示意图;
图14是本发明的智能锁的实施例一的机械锁系统对电子锁系统的控制方式二的示意图;
图15是本发明的智能锁的实施例一的机械锁系统对电子锁系统的控制方式三的示意图;
图16是图15中的B部放大示意图;
图17是本发明的智能锁的实施例一的结构示意图(未触发开关状态);
图18是图17中的C部放大示意图;
图19是本发明的智能锁的实施例二的电子锁的内板面的主视图(安装按钮);
图20是本发明的智能锁的实施例二的电子锁的内板面的侧视图(安装按钮);
图21是本发明的智能锁的实施例二的电子锁的内板面的主视图(安装旋钮);
图22是本发明的智能锁的实施例二的电子锁的内板面的侧视图(安装旋钮);
图23是本发明的智能锁的实施例二的结构示意图;
图24是图20中的D部放大示意图;
图25是本发明的智能锁的实施例三的结构示意图;
图26是本发明的智能锁的实施例三的局部结构示意图一;
图27是沿图23的E-E线的剖视图。
具体实施方式
实施例一
参见图1至图18所示,本发明的一种智能锁的联锁控制方法,智能锁主要包括机械锁系统1、电子锁系统2和锁体系统3;机械锁系统1可以是弹子锁结构和/或叶片锁结构或者其它已公开的采用钥匙进行开锁或关锁的结构;电子锁系统2可以是以识别输入、静脉识别输入、人脸输入、声控输入、数字键盘密码输入、刷卡感应输入、遥控器输入、远程APP系统密码输入进行开锁或关锁的或者其它已公开的电子锁的密码形式输入来开锁或关锁;
该智能锁的联锁控制方法包括:
电子锁的开关锁步骤;该步骤是利用电子锁系统2对锁体系统进行控制,使锁体系统3执行开锁或关锁的动作,即锁舌7伸出关锁,锁舌7缩回开锁;
电子锁的开关锁步骤,可以是利用指纹识别输入、静脉识别输入、人脸输入、声控输入、数字键盘密码输入、刷卡感应输入、遥控器输入、远程APP系统密码输入或者其它已公开的电子锁的密码形式输入进行开锁或关锁的步骤,即锁舌7伸出关锁,锁舌7缩回开锁;
本实施例中,在电子锁系统2的安装在门外的外板面21设有摄像头区211、密码区212和指纹区213,可以实现人脸输入、密码输入和指纹识别输入等电子锁其它的密码形式输入来开锁或关锁;电子锁系统2的内板面22还设有把手221;
机械锁的开关锁步骤;该步骤是利用机械锁系统1对锁体系统进行控制,使锁体系统3执行开锁或关锁的动作,即锁舌7伸出关锁,锁舌7缩回开锁。
机械锁的开关锁步骤,可以是采用钥匙4基于弹子锁结构特征进行开锁或关锁的步骤;和/或采用钥匙基于叶片锁结构特征进行开锁或关锁的步骤或其它已公开的电子锁的密码形式输入来开锁或关锁;
还包括机械锁系统1对电子锁系统2的控制步骤;该步骤是通过钥匙转动机械锁系统1的动作,使电子锁系统2中的开关锁机构处于可工作状态或不可工作状态。
本发明的联锁控制是机械锁和电子锁的联动关系,不是机械锁和电子锁并行可各自独立运行。
本实施例中,机械锁系统1优先联动控制电子锁系统2,机械锁系统1长期处于独立工作或非独立工作状态;当机械锁系统1处于独立工作状态时,通过机械锁系统1对电子锁系统2的控制,电子锁系统2的开关锁机构处于不可工作状态;当机械锁系统1处于非独立工作状态时,通过机械锁系统1对电子锁系统2的控制,电子锁系统2开关锁机构处于可工作状态。
本实施例中,所述机械锁系统1对电子锁系统2的控制步骤是在电子锁系统2设机械开关或电子开关,用来控制电子锁系统2的开关锁机构,使电子锁系统2的开关锁机构处于可工作状态或不可工作状态,并且利用钥匙4的动作直接或间接地触动机械开关或电子开关的开或关,从而实现机械锁系统1对电子锁系统2的控制。
所述钥匙4的动作间接地触动机械开关或电子开关的开或关是由钥匙4转动锁头的锁芯11,通过锁芯11带动联动件71触动电子开关的开或关,本实施例中,联动件71是设在锁舌7上,即锁舌7一体设有联动件71。
参见图4至图6,机械锁系统1是插入钥匙4→机械锁解码→旋转锁头的锁芯11→带动转动拨叉8→拨叉8带动锁舌7→锁舌7伸出关锁,锁舌7缩回开锁。
参见图7至图9,电子锁系统1是电子系统感应输入后控制电机5转动→带动连接件24→连接件24带动拨叉8旋转→拨叉8带动锁舌7→锁舌7伸出关锁,锁舌7缩回开锁。
机械锁系统1未对电子锁系统2进行控制时,如图17-18所示,此时锁舌7的联动件71与电子开关23脱开,电子系统与机械系统同时有效,控制关锁与开锁(锁舌7伸出关锁,锁舌7缩回开锁);机械锁系统1对电子锁系统2进行控制时,锁舌7上的联动件71与电子开关接触,如图10-11所示,此时由机械系统旋转拨叉8到第二档时锁舌7上的联动件71触发电子开关23,关闭电子锁系统的上锁与解锁功能时,只能靠机械系统来完成开锁与关锁(锁舌7伸出关锁,锁舌7缩回开锁)。
本实施例中,所述机械锁系统1对电子锁系统2的控制步骤是在电子锁系统2设电子开关23,用来控制电子锁系统2的开关锁机构。所述钥匙4的动作间接控制锁舌7的联动件71触动电子开关23的开或关,是由钥匙4的转动带动锁芯11转动再带动拨叉8旋转再由拨叉8带动锁舌7动作,锁舌7移动后使得锁舌7上的联动件71触动电子开关23,从而切断电机供电。所述电子锁系统2的开关锁机构的不可工作状态是指电子锁系统2内的电机5的供电被切断。
如图13-14所示,机械锁系统1对电子锁系统2的控制方式一是属于切断电机供电的方案一:插入钥匙4→机械锁解码→旋转锁头的锁芯11→带动拨叉8→拨叉8旋转(第一圈)带动锁舌7(第一档)再旋转第二圈带动锁舌7(第二档)使锁舌部件上的联动件71触发开关23→断开电机5电源,使电机5无法工作,此时电子系统的开锁功能无效,只能使用机械钥匙4即机械锁系统1开锁。
机械锁系统1对电子锁系统2的控制方式二是属于切断供电的方案二:插入钥匙4→机械锁解码→旋转锁头的锁芯11→带动拨叉8→拨叉8旋转(第一圈)带动锁舌7(第一档)再旋转第二圈带动锁舌7(第二档)使锁舌部件上的联动件71触发开关23→发出电子信号给控制模块9,控制模块9控制电机5电源开关关闭,使电机5无法工作。此时电子系统的开锁功能无效,只能使用机械钥匙4即机械锁系统1开锁。
如图15-16所示,机械锁系统1对电子锁系统2的控制方式三是控制离合器72使电机5的输出成空转的方案:插入钥匙4→机械锁解码→旋转锁头的锁芯11→带动拨叉8→拨叉8旋转(第一圈)带动锁舌7(第一档)再旋转第二圈带动锁舌7(第二档)使锁舌部件上的联动件71触发开关23→离合器72的A面721与连接件24的B面241脱开,使电机5的输出成空转,此时电子系统的开锁功能无效,只能使用机械钥匙4即机械锁系统1开锁。
进一步的,还包括显示和/或提示步骤,智能锁通过增设显示模块和/或提示模块来显示或提示智能锁是处于机械锁工作状态还是电子锁工作状态。具体的,智能锁增设显示模块6,所述电子锁系统2包括外板面21和内板面22,电子锁系统2的外板面21和内板面22分别设有显示屏61、62,用户可通过所述显示屏61、62得知智能锁是处于机械锁工作状态还是电子锁工作状态。
当机械锁系统1处于使用状态时,通过机械锁系统1对电子锁系统2的控制,电子锁系统2的开关锁机构处于不可工作状态,智能锁上的显示屏61、62显示处于机械锁工作状态;当机械锁系统1处于待命状态时,通过机械锁系统1对电子锁系统2的控制,电子锁系统2的开关锁机构处于可工作状态,智能锁上的显示屏61、62显示处于电子锁工作状态。
本发明的一种智能锁,使用如上所述的智能锁的联锁控制方法。
实施例二
参见图19-24所示,本发明的一种智能锁的联锁控制方法及智能锁,与实施例一不同之处在于,还包括在电子锁系统2的内板面22中加装按钮10或者是旋钮12,通过按钮10或者是旋钮12来控制智能锁是处于机械锁工作状态还是电子锁工作状态。
第一种情况,当按钮10或者是旋钮12未动作时,此时可以电子系统与机械系统同时有效,控制关锁与开锁(锁舌缩回伸出);
第二种情况,内面板的按钮开关关闭电子锁系统的关锁与开锁功能时,只能靠机械系统来完成关锁与开锁(锁舌缩回伸出);
第三种情况,内面板的旋钮开关关闭电子锁系统的关锁与开锁功能时,只能靠机械系统来完成关锁与开锁(锁舌缩回伸出)。
第一种情况的过程可以是:①插入钥匙→机械锁解码→旋转锁头的锁芯→转动拨叉→拨叉带动锁舌→锁舌7伸出关锁,锁舌7缩回开锁→拔出钥匙;
②电子系统控制电机转动→带动连接件→连接件带动拨叉旋转→拨叉带动锁舌→锁舌7伸出关锁,锁舌7缩回开锁;
第二种情况的过程可以是:①内面板的按钮开关按下后,切断电机电源和/或触发控制模块和/或离合器与连接件脱开,电子锁系统关锁与开锁功能无效;
②此时只能用机械系统关锁或开锁:插入钥匙→机械锁解码→旋转锁头的锁芯→转动拨叉→拨叉带动锁舌→锁舌7伸出关锁,锁舌7缩回开锁→拔出钥匙;
第三种情况的过程可以是:①内面板的旋钮开关旋转后,切断电机电源和/或触发控制模块和/或离合器与连接件脱开,电子锁系统关锁与开锁功能无效。
②此时只能用机械系统关锁或开锁:插入钥匙→机械锁解码→旋转锁头的锁芯→转动拨叉→拨叉带动锁舌→锁舌7伸出关锁,锁舌7缩回开锁→拔出钥匙。
实施例三
参见图25-27所示,本发明的一种智能锁的联锁控制方法及智能锁,与实施例一、实施例二的不同之处在于,所述电子锁系统2的开关锁机构的不可工作状态是通过在连接件24上设限位槽242,在锁壳上设限位销81,锁壳的限位销81配合在连接件24的限位槽24中,利用限位销81卡在左右旋转的一定范围内(不到一圈即一档内)来控制电机的转动,使电子锁系统的关锁与开锁功能无效。
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案作出许多可能的变动和修饰,或修改为等同化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。