用于锁定装置的联接布置结构和锁定装置
文献发布时间:2024-01-17 01:21:27
技术领域
本公开总体上涉及用于锁定装置的联接布置结构。特别地,提供了用于锁定装置的联接布置结构以及包括这种联接布置结构的锁定装置,该联接布置结构包括输入元件、输出元件和联接构件。
背景技术
一些锁定装置包括芯壳体、能够相对于芯壳体绕旋转轴线旋转的输出元件、能够绕旋转轴线旋转的旋钮以及用于将旋钮与输出元件选择性地联接的机电联接布置结构。当用户已经获得授权时,联接布置结构将旋钮和输出元件联接,并且锁定装置可以通过转动旋钮被打开。这种锁定装置可以被称为数字锁芯。
在这种类型的一些锁定装置中,联接布置结构包括电动马达和诸如销之类的接合构件,该接合构件由与旋转轴线线性地平行的电动马达在断开联接位置与联接位置之间驱动。然而,电动马达与旋转轴线平行的布置以及接合构件与旋转轴线平行的运动增加了锁定装置在轴向方向上,即沿着旋转轴线的尺寸。因此,锁定装置可以从门表面突出,并且可能由此需要环状件或饰框来隐藏突出部。
发明内容
本公开的一个目的是提供一种用于锁定装置的联接布置结构,该联接布置结构具有紧凑的设计。
本公开的另一目的是提供一种用于锁定装置的联接布置结构,该联接布置结构具有小尺寸。
本公开的又一目的是提供一种用于锁定装置的联接布置结构,该联接布置结构包括具有成本效益的设计。
本公开的又一目的是提供一种用于锁定装置的联接布置结构,该联接布置结构具有低功率消耗。
本公开的又一目的是提供一种用于锁定装置的联接布置结构,该联接布置结构具有低复杂性的设计。
本公开的又一目的是提供一种用于锁定装置的联接布置结构,该联接布置结构是牢固的。
本公开的又一目的是提供一种用于锁定装置的联接布置结构,该联接布置结构提供了可靠的操作。
本公开的又一目的是提供一种用于锁定装置的联接布置结构,该联接布置结构组合地解决了前述目的中的若干目的或全部目的。
本公开的又一目的是提供一种包括联接布置结构的锁定装置,该锁定装置解决了前述目的中的一个目的、若干目的或全部目的。
根据一个方面,提供了一种用于锁定装置的联接布置结构,该联接布置结构包括输入元件,该输入元件能够绕旋转轴线旋转;输出元件,该输出元件能够绕旋转轴线旋转;接合钩件,该接合钩件能够在第一位置与第二位置之间移动;电动马达,该电动马达布置成影响接合构件在第一位置与第二位置之间的运动;联接构件,该联接构件相对于旋转轴线旋转地锁定至输入元件并且能够相对于输入元件沿着旋转轴线在断开联接位置与联接位置之间轴向移动,在断开联接位置中,输入元件的旋转不通过联接构件被传递至输出元件的旋转,在联接位置中,输入元件的旋转通过联接构件被传递至输出元件的旋转;以及传动机构,该传动机构布置成在接合构件采用第二位置时将联接构件的旋转传递至联接构件从断开联接位置到联接位置的运动。
当联接构件采用联接位置时,锁定装置的输出元件可以通过使输入元件旋转而被旋转。因此,在联接构件的联接位置中,锁定装置可以通过使输入元件旋转而被锁定或解锁。
当联接构件采用断开联接位置时,输入元件的旋转不被传递至输出元件的旋转。在联接构件的断开联接位置中,输入元件和联接构件能够相对于输出元件围绕旋转轴线自由地旋转。因此,在联接构件的断开联接位置中,锁定装置不能通过使输入元件旋转而被锁定或解锁。
联接构件布置成在断开联接位置中不将输入元件的旋转传递至输出元件的旋转,并且在联接位置中将输入元件的旋转传递至输出元件的旋转。由此,联接构件用作离合器。
在第二位置中,接合构件可以接合联接构件。在第一位置中,接合构件可以与联接构件断开接合。接合构件可以布置成在联接构件处于断开联接位置时采用第一位置和第二位置中的任一者。联接构件可以包括一个或更多个凹部。接合构件可以在第二位置中接合一个凹部并且可以在第一位置中与每个凹部断开接合。
由于联接构件的旋转在接合构件采用第二位置时通过传动机构传递至联接构件从断开联接位置至联接位置的运动,所以联接布置结构使得接合构件能够沿垂直于旋转轴线的方向在第一位置与第二位置之间移动。与现有技术的联接布置结构——其中,接合构件在断开联接位置与接合输出元件的接合位置之间平行于旋转轴线移动——相比,这又使得联接布置结构能够沿着旋转轴线被制得更紧凑和更小。以这种方式,整个锁定装置也可以被制得更紧凑和更小。
输入元件可以固定至可手动操纵的致动元件、比如旋钮,或由可手动操纵的致动元件、比如旋钮构成。由于输入元件的旋转在接合构件采用第二位置时被传递至联接构件的从断开联接位置到联接位置的运动,所以联接构件通过手动力而不是通过电动马达从断开联接位置移动至联接位置。然而,接合构件的位置(接合构件由电动马达控制)决定了联接构件在输入元件通过手动力旋转时是否将从断开联接位置移动至联接位置。因此,电动马达间接地有助于联接构件的从断开联接位置到联接位置的运动。
由于联接构件通过输入元件的旋转从断开联接位置移动至联接位置,所以用于接合构件在第一位置与第二位置之间的距离可以相当短。这进一步有助于联接布置结构的紧凑设计。
传动机构可以采取各种形式,以便在接合构件采用第二位置时,将联接构件的旋转机械地传递至联接构件从断开联接位置沿着旋转轴线到联接位置的运动。根据一种变型,传动机构由联接构件、或者由接合构件和联接构件形成。然而,除了接合构件和联接构件之外,传动机构可以可选地包括另外的部件。
输入元件可以构造成绕旋转轴线连续地旋转。由此,可以提供无缝访问。
联接构件可以在从断开联接位置移动至联接位置时沿向前的方向移动。相反,联接构件可以在从联接位置移动至断开联接位置时沿向后的方向移动。输出元件可以布置在联接构件的前方。
联接构件能够沿着输入元件在断开联接位置与联接位置之间滑动。联接构件因此可以是滑动构件。联接构件可以封围输入元件。替代性地或附加地,联接构件可以与旋转轴线同心。
输入元件可以包括一个或更多个输入轴。对应地,输出元件可以包括一个或多个输出轴。
输出元件可以包括锁定构件、比如尾件。输出元件可以布置成在锁舌接合撞击板的接合位置与锁舌从撞击板缩回的断开接合位置之间驱动锁壳中的锁舌。
第二位置可以相对于旋转轴线位于第一位置的径向内侧。联接构件可以具有大致筒形形状或筒形形状。
电动马达可以是用于影响接合构件在第一位置与第二位置之间的运动的线性马达。电动马达可以由电池供电。替代性地或附加地,电动马达可以借助于能量收集来供电。
电动马达可以布置成影响接合构件沿致动方向在第一位置与第二位置之间的线性运动。电动马达可以是长形的。在这种情况下,电动马达可以与致动方向同心。
致动方向和旋转轴线可以是不平行的。致动方向可以相对于旋转轴线例如成45度至135度、比如80度至100度的角度。
致动方向可以相对于旋转轴线成大约90度、比如90度的角度。
联接布置结构还可以包括布置成由电动马达驱动的致动构件以及布置成将接合构件相对于致动构件从第一位置向第二位置推压的接合弹簧。致动构件、接合弹簧和接合构件可以形成用于选择性地接合联接构件的弹簧加载组件。接合弹簧可以布置在致动构件与接合构件之间。
电动马达可包括带螺纹的且可旋转的马达轴。在这种情况下,致动构件可以螺纹地接合马达轴,使得马达轴的旋转引起致动构件的线性运动。
致动构件能够在第一致动位置与第二致动位置之间移动。在这种情况下,接合弹簧可以布置成在致动构件采用第二致动位置时将接合构件从第一位置推压至第二位置。因此,通过将致动构件从第一致动位置移动至第二致动位置,电动马达可以影响接合构件从第一位置到第二位置的移动。
例如,当电动马达未被致动成使得致动构件处于第一致动位置时,接合构件通过接合弹簧保持在第一位置中。当电动马达被致动成使得致动构件从第一致动位置移动至第二致动位置并且接合构件与联接构件中的凹部不对准时,电动马达的致动导致接合弹簧被压缩。当联接构件旋转成使得接合构件变得与接合构件中的凹部对准时,接合弹簧将接合构件相对于致动构件从第一位置推压并进入接合件进入凹部的第二位置中。因此,只有当致动构件处于第二致动位置并且当联接构件的一个凹部相对于旋转轴线与接合构件旋转地对准时,接合构件才可以布置成采用第二位置。
传动机构可以包括至少一个凸轮轮廓。在这种情况下,接合构件可以布置成在第二位置中接合至少一个凸轮轮廓中的一个凸轮轮廓。每个凸轮轮廓可以设置在联接构件上、例如设置在联接构件的径向外圆周上。每个凸轮轮廓可以包括与旋转轴线成一定角度、例如相对于旋转轴线成40度至80度的角度的一个或更多个表面。
每个凸轮轮廓可以是联接构件中的凹部的边缘。当接合构件处于第二位置并接合一个或更多个凸轮轮廓中的一个凸轮轮廓时,该接合在联接构件围绕旋转轴线旋转时导致接合构件被沿着旋转轴线向前推动。
联接构件可以包括圆形轨道。在这种情况下,接合构件可以布置成接合轨道。轨道可以部分地或完全地围绕联接构件。在任何情况下,轨道可以位于垂直于旋转轴线的平面内。当接合构件接合轨道时,联接构件保持在联接位置中。每个凸轮轮廓可以位于轨道与输出元件之间。
电动马达可以布置成影响接合构件从第二位置到第三位置的运动。在这种情况下,第二位置可以位于第一位置与第三位置之间,并且接合构件可以布置成在接合构件采用第三位置且联接构件采用联接位置时接合轨道。同样在第三位置中,接合构件可以接合联接构件。接合构件从第一位置到第二位置的运动以及接合构件从第二位置到第三位置的随后的运动提供了联接构件通过接合构件的两步接合。
第三位置可以相对于旋转轴线位于第二位置的径向内侧。第二位置可以相对于旋转轴线径向地位于第一位置与第三位置之间。
如上面所提及的,接合构件可以布置成在联接构件沿着旋转轴线采用断开联接位置时采用第一位置和第二位置中的任何位置。接合构件可以布置成在联接构件沿着旋转轴线采用联接位置时采用第三位置。联接构件可以在联接位置中比在断开联接位置中更靠近输出元件。
作为可能的替代方案,接合构件在接合构件处于第二位置时可以接合轨道。例如,当联接构件采用联接位置时,可以利用联接构件中的两个凹部之间的角距离以借助于输入元件使输出元件旋转。
接合弹簧可以布置成在致动构件采用第二致动位置时将接合构件从第二位置推压至第三位置。因此,由致动构件从第一致动位置移动至第二致动位置的距离可以等于或大于由接合构件从第一位置移动至第三位置的距离。
联接布置结构还可以包括联接器,该联接器布置成在联接构件采用联接位置时将联接构件的旋转传递至输出元件的旋转。联接器可以包括第一联接部分和第二联接部分。第一联接部分可以设置在联接构件上并且/或者第二联接部分可以设置在输出元件上。
该联接器可以是端面齿联接器。端面齿联接器提供了自定心效果并且由此防止联接布置结构的堵塞。端面齿联接器可以包括在第一联接部分和第二联接部分中的每一者上的锥形齿,该锥形齿在联接器构件采用联接位置时啮合在一起。联接器可以替代性地是齿式离合器。
联接布置结构还可以包括联接推压装置,该联接推压装置布置成将联接构件朝向断开联接位置推压。联接推压装置可以是弹簧、比如压缩螺旋弹簧。当接合构件处于第三位置时,联接构件由接合构件抵抗联接推压装置的力保持在联接位置中。当接合构件从第三位置缩回至第一位置时,联接推压装置将联接构件从联接位置例如在沿着旋转轴线向后的方向上推压回到断开联接位置。
根据另一方面,提供了一种包括根据本公开的联接布置结构的锁定装置。锁定装置可以例如是锁芯。在这种情况下,锁定装置可以构成数字锁芯或机电锁芯。锁定装置可以替代各种锁芯、例如门锁、挂锁或自行车锁。
该锁定装置还可以包括芯壳体。在这种情况下,电动马达、接合构件和联接构件可以布置在芯壳体的内部。以这种方式,可以进一步防止对篡改或破坏的抵抗。
锁定装置还可以包括可手动操纵的致动元件。致动元件例如可以是杠杆手柄、旋钮或拇指转盘。致动元件可以构造成被用户的手接触和移动。致动元件可以刚性地连接至输入元件或者与输入元件一体形成。当用户转动致动元件时,输入元件和联接构件共同绕旋转轴线旋转。
附图说明
本公开的其他细节、优点和方面将根据以下结合附图的描述变得明显,在附图中:
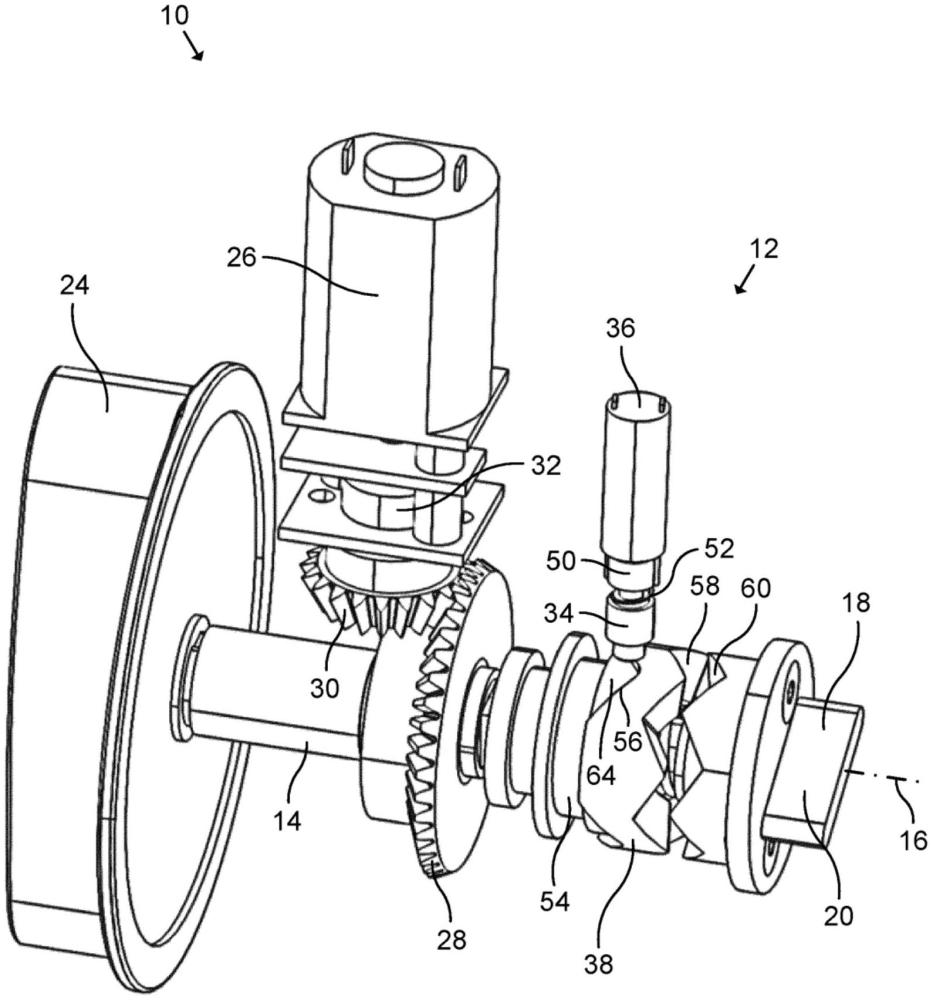
图1:示意性地表示了包括联接布置结构的锁定装置的立体图;
图2:示意性地表示了锁定装置的横截面侧视图;
图3:示意性地表示了锁定装置的局部立体图;
图4:示意性地表示了锁定装置的框图;
图5:示意性地表示了联接布置结构在致动构件处于第一致动位置、接合构件处于第一位置并且联接构件处于断开联接位置时的立体图;
图6:示意性地表示了联接布置结构在致动构件处于第二致动位置时的立体图;
图7:示意性地表示了联接布置结构在接合构件处于第二位置时的立体图;
图8:示意性地表示了联接布置结构在输入元件旋转时的立体图;
图9:示意性地表示了联接布置结构在输入元件进一步旋转、联接构件处于联接位置并且接合构件处于第三位置时的立体图;
图10:示意性地表示了联接布置结构在输出元件通过输入构件的旋转而旋转时的立体图;以及
图11:示意性地表示了联接布置结构在致动构件已经返回至第一致动位置、接合构件已经返回至第一位置并且联接构件已经返回至断开联接位置时的立体图。
具体实施方式
在下文中,将描述用于锁定装置的联接布置结构以及包括这种联接布置结构的锁定装置,该联接布置结构包括输入元件、输出元件和联接构件。相同或相似的附图标记将用于表示相同或相似的结构特征。
图1示意性地表示了锁定装置的10立体图。锁定装置10包括联接布置结构12。联接布置结构12包括能够绕旋转轴线16旋转的输入元件14和能够绕旋转轴线16旋转的输出元件18。该示例的输出元件18包括尾件20。尾件20是根据本公开的锁定构件的一个示例。
该示例的锁定装置10还包括芯壳体22。联接布置结构12的一部分布置在芯壳体22的内部。输入元件14从芯壳体22的一个侧部突出,并且尾件20定位在芯壳体22的相对侧部上。
该示例的锁定装置10还包括旋钮24。旋钮24是根据本公开的致动元件的一个示例。旋钮24可以通过手绕旋转轴线16旋转。输入元件14固定至旋钮24并与旋钮24共同旋转。旋钮24和输入元件14可以围绕旋转轴线16连续地旋转。
该示例的锁定装置10还包括发电机26。发电机26可以例如固定至门扇(未示出)。旋钮24可以在这种情况下能够相对于门扇旋转。
发电机26可以通过输入元件14的旋转被驱动以产生电能。为此,该示例的锁定装置10包括冠状齿轮28、小齿轮30和齿轮箱32。冠状齿轮28固定至输入元件14并绕旋转轴线16旋转。小齿轮30与冠状齿轮28啮合并绕垂直于旋转轴线16的轴线旋转。此处,冠状齿轮28和小齿轮30形成锥齿轮。齿轮箱32可以是包括一个或更多个中间齿轮的齿轮传动装置。小齿轮30的旋转经由齿轮箱32被传递至发电机26的转子(未示出)的旋转以由此产生电能。
图2示意性地表示了锁定装置10的横截面侧视图。如图2中所示出的,锁定装置10还包括接合构件34、电动马达36和联接构件38。
该具体示例的输入元件14包括输入轴40、方形轴42、插塞44和带肩螺钉46。输入轴40、方形轴42、插塞44和带肩螺钉46中的每一者与旋转轴线16同心并且能够围绕旋转轴线16旋转。输入轴40固定至旋钮24。方形轴42通过被接纳在输入轴40中而固定至输入轴40。插塞44固定至方形轴42。带肩螺钉46固定至插塞44。如图2中所示出的,插塞44和带肩螺钉46布置在芯壳体22的内部。冠状齿轮28固定至输入轴40。
接合构件34布置在芯壳体22的内部。该示例的接合构件34包括圆柱形销。
电动马达36在该示例中布置成由发电机26供电。因此,该示例的锁定装置10借助于能量收集来供电。电动马达36可以替代性地由电池供电。
电动马达36包括带螺纹的马达轴48和螺纹地接合马达轴48的致动构件50。通过致动电动马达36以使马达轴48旋转,致动构件50可以沿垂直于旋转轴线16的方向移动。如图2中所示出的,电动马达36具有长形的形状并且垂直于旋转轴线16定向。通过将电动马达垂直于旋转轴线16布置,联接布置结构12不会如同电动马达36将与旋转轴线16平行一样从门扇突出太多。锁定装置10因此变得更加紧凑。芯壳体22例如可以是仅13mm长同时包含电动马达36。因此,芯壳体22将完全装配到为芯壳体所钻出的大多数孔中,而不会从门表面突出。门表面可以定位在发电机26与芯壳体22之间。
联接布置结构12还包括接合弹簧52。接合弹簧52布置在致动构件50与接合构件34之间。接合弹簧52在此被设计为环绕马达轴48的压缩螺旋弹簧。
联接构件38旋转地固定至输入元件14、在此固定至插塞44并围绕插塞44。因此,当输入元件14围绕旋转轴线16旋转时,联接构件38也围绕旋转轴线16旋转。然而,联接构件38布置成相对于输入元件14沿着旋转轴线16滑动。
该示例的联接构件38包括轨道54和凸轮轮廓56。凸轮轮廓56是根据本公开的传动机构的一个示例。如下所述,接合构件34可以接合凸轮轮廓56和轨道54。联接构件38还包括第一联接部分58。凸轮轮廓56在此沿着旋转轴线16布置在轨道54与第一联接部分58之间。如图2中所示出的,联接构件38也布置在芯壳体22的内部。
除了尾件20之外,该示例的输出元件18还包括第二联接部分60。第二联接部分60固定至尾件20。第二联接部分60能够相对于带肩螺钉46自由旋转。为此,在带肩螺钉46与第二联接部分60之间设置有游隙。第二联接部60设置在芯壳体22的内部并且尾件20设置在芯壳体22的外部。
该示例的联接布置结构12还包括联接弹簧62。联接弹簧62是根据本公开的联接推压装置的一个示例。联接弹簧62作用在联接构件38与输出元件18之间。联接弹簧62在此示例为环绕插塞44的压缩螺旋弹簧。
图3示意性地表示锁定装置10的局部立体图。联接构件38包括多个凹部64。在该示例中,联接构件38包括围绕旋转轴线16均匀分布的三个凹部64。轨道54比每个凹部64更深。轨道54围绕联接构件38的整个圆周设置并且位于垂直于旋转轴线16的平面内。在该示例中,每个凹部64的边缘限定凸轮轮廓56中的一个凸轮轮廓。每个凸轮轮廓56包括两个表面。每个这样的表面在此相对于旋转轴线16倾斜大约60度。
第一联接部分58和第二联接部分60中的每一者具有圆形圆周并且相对于旋转轴线16定中心。第一联接部分58和第二联接部分60形成根据本公开的联接器的一个示例。第一联接部分58和第二联接部分60中的每一者包括用于啮合接合的多个锥形齿。该示例的联接器是端面齿联接器。
发电机26可以将来自旋钮24的手动旋转的机械能转换成电能。由此,通过手动旋转旋钮24所收集的电能可以用于授权用户,以命令电动马达36将致动构件50从第一致动位置移动至第二致动位置,并且命令电动马达36在一段时间后将致动构件50从第二致动位置移动返回至第一致动位置。发电机26可以用作用于联接装置的主要能量来源。
图4示意性地表示锁定装置10的许多实现方式中的一个实现方式的框图。锁定装置10还包括电子装置,该电子装置总体上由附图标记66表示。电子装置66布置成由发电机26供电。电子装置66还配置成在用户授权时产生授权信号68。当电动马达36接收到授权信号68时,电动马达36将致动构件50从第一致动位置驱动至第二致动位置。
如图4中所图示的,电子装置66将发电机26电连接至电动马达36。图4中的示例的电子装置66包括电力管理电子装置70、读取电子装置72和凭证评估电子装置74。发电机26、电力管理电子装置70、读取电子装置72、凭证评估电子装置74和电动马达36由电导体连接,如图4中所示出的。电动马达36由此布置成由发电机26供电。
该示例的电力管理电子装置70包括能量收集电子装置、比如二极管(未示出)和电容器(未示出)。该示例的读取电子装置72包括用于接收输入信号的天线(未示出)和读取单元(未示出)。
当旋钮24被用户的手手动抓住并旋转时,发电机26从旋转中收集电能。当发电机26已经收集到足够的电能时,启动授权过程。在授权过程期间,读取电子装置72由电力管理电子装置70供电并且可以例如与外部装置无线通信、比如经由BLE(蓝牙低功耗)与移动电话进行无线通信。读取电子装置72从外部装置接收凭证并且基于该凭证向凭证评估电子装置74发送访问信号76。
凭证评估电子装置74然后基于访问信号76确定是否应该准许访问。如果授权请求被拒绝,则电动马达36不被致动,即致动构件50保持在第一致动位置中。如果授权请求被准许、例如如果提供有效凭证,则凭证评估电子装置74向电动马达36发出授权信号68。当通过旋钮24的进一步连续旋转已经收集到足够的电能时,电动马达36被致动以将致动构件50从第一致动位置驱动至第二致动位置。
图5示意性地表示联接布置结构12的立体图,其中,致动构件50处于第一致动位置78、接合构件34处于第一位置80、并且联接构件38处于断开联接位置82。在联接构件38的断开联接位置82中,第一联接部分58与第二联接部分60沿着旋转轴线16间隔开。输入元件14的旋转由此不被传递至输出元件18的旋转。因此,锁定装置10在联接构件38处于断开联接位置82时不能通过旋钮24的旋转被解锁(或锁定)。
当致动构件50处于第一致动位置78时,接合构件34通过接合弹簧52保持在第一位置80中。在第一位置80中,接合构件34不与联接构件38接合。联接构件38由此借助于联接弹簧62被推压至断开联接位置82(至图5中的左侧)。
图6示意性地表示联接布置结构12在致动构件50例如响应于获准的授权请求而已经被电动马达36从第一致动位置78驱动至第二致动位置84时的立体图。如图6中所示出的,接合构件34不与凹部64中的任何凹部对准。因此,致动构件50从第一致动位置78到第二致动位置84的运动导致接合弹簧52被压缩。接合构件34现在被推压抵靠联接构件38的外表面,相对于旋转轴线16位于凹部64的径向外侧。
图6还示出了致动构件50从第一致动位置78到第二致动位置84的运动发生在垂直于旋转轴线16的致动方向86上。因此,致动方向86在此与旋转轴线16成90度角度。
图7示意性地表示联接布置结构12在接合构件34处于第二位置88时的立体图。通过在致动构件50处于第二致动位置84时手动旋转旋钮24,接合构件34最终变得与联接构件38中的凹部64中的一个凹部对准。接合弹簧52然后迫使接合构件34从第一位置80径向向内(相对于旋转轴线16)移动至第二位置88以接合联接构件38。如可以从图7中获悉,接合构件34从第一位置80移动至第二位置88的距离相当短并且基本上对应于凹部64的深度。
由于致动构件50在第二致动位置84中的定位是接合构件34从第一位置80移动至第二位置88的先决条件,因此电动马达36据说被布置成影响接合构件34从第一位置80到第二位置88的运动。注意,联接构件38在接合构件34已经进入凹部64之后立即保持在断开联接位置82中。
图8示意性地表示联接布置结构12在输入元件14通过旋钮24的旋转而进一步旋转时的立体图。如图8中所示出的,当接合构件34处于第二位置88并且联接构件38旋转时,接合构件34与凸轮轮廓56之间的接合使得联接构件38抵抗联接弹簧62的力被向前推动(至图8中的右侧)。联接构件38由此通过旋转旋钮24的手动力而不是通过来自电动马达36的力在输入元件14上向前滑动。
图9示意性地表示联接布置结构12在输入元件14进一步旋转时的立体图。如图9中所示出的,联接构件38的进一步旋转已经导致联接构件38沿着旋转轴线16进一步移动并进入到联接位置90中。同时,输入元件14变成与轨道54对准。接合弹簧52由此迫使接合构件34从第二位置88径向向内(相对于旋转轴线16)移动至接合轨道54的第三位置92。如可以从图9获悉,接合构件34从第二位置88移动至第三位置92的距离相当短并且基本上对应于轨道54的底部与凹部64的底部之间的径向距离(相对于旋转轴线16)。
当接合构件34处于第二位置88时,借助于接合构件34与凸轮轮廓56之间的接合,接合构件38绕旋转轴线16的旋转被传递至联接构件38从断开联接位置82到联接位置90的运动。以这种方式,在此由凸轮轮廓56示例的传动机构布置成在接合构件34处于第二位置88时将联接构件38绕旋转轴线16的旋转传递至联接构件38沿着旋转轴线16从断开联接位置82到联接位置90的运动。
当联接构件38处于联接位置90时,输入元件14和输出元件18通过第一联接部分58与第二联接部分60之间的接合而共同旋转。只要致动构件50处于第二致动位置84,联接构件38就(通过处于第三位置92的接合构件34)保持在联接位置90中。由于致动构件50在第二致动位置84中的定位是接合构件34从第二位置88移动至第三位置92的先决条件,所以电动马达36据说被布置成影响接合构件34从第二位置88到第三位置92的运动。
图10示意性地表示联接布置结构12在输出元件18通过输入元件14的旋转而旋转时的立体图。尾件20的旋转例如通过驱动锁壳(未示出)中的插塞导致锁定装置10的解锁。
旋钮24可以在授权过程期间绕旋转轴线16连续地旋转。通过手动旋转旋钮24收集的电能由此可以用于授权用户并致动电动马达36,以将致动构件50从第一致动位置78驱动至第二致动位置84。用户可以在授权过程、致动构件50的随后的切换过程以及尾件20的随后的旋转期间连续地旋转旋钮24。由此,提供了无缝访问。
图11示意性地表示联接布置结构12在致动构件50已经返回至第一致动位置78时的立体图。当致动构件50返回至第一致动位置78时,接合弹簧52将接合构件34从第三位置92拉动脱离轨道54并返回至第一位置80。然后,联接弹簧62将联接构件38从联接位置90推回至断开联接位置82。
虽然已经参照示例性实施方式对本公开进行了描述,但将理解的是,本发明不限于以上已经描述的内容。例如,将理解的是,部件的尺寸可以根据需要而变化。因此,这意味着本发明可以仅受本文所附的权利要求的范围限制。