车辆用开闭体控制装置
文献发布时间:2024-01-17 01:23:59
技术领域
本发明涉及一种车辆用开闭体控制装置。
背景技术
以往,有如下车辆用的门装置,该门装置具备第一连杆臂和第二连杆臂,该第一连杆臂和第二连杆臂具有相对于车身的第一转动连结点和相对于车辆的门的第二转动连结点。这样的门装置基于第一连杆臂和第二连杆臂所形成的连杆机构的动作使设置于其门开口部的门进行开闭动作。并且,例如专利文献1中记载了如下结构:在门处于闭状态的情况下,将形成该连杆机构的各连杆臂收容于在车身侧部的末端部安装的门开口的外侧且在门的车内侧安装的密封条的内侧。
现有技术文献
专利文献
专利文献1:日本特开2006-90097号公报
发明所要解决的技术问题
但是,在上述那样使用连杆机构使车辆的开闭体进行开闭动作的结构中,容许开闭体绕第二转动连结点转动。因此,开闭体可能因外力的输入等而摆动。并且,该开闭体产生的摆动可能妨碍其顺畅的动作。
发明内容
用于解决技术问题的技术手段
解决上述技术问题的车辆用开闭体控制装置具备驱动控制部,该驱动控制部将电机作为驱动源来使车辆的开闭体进行开闭动作,所述开闭体通过连杆机构的动作来进行所述开闭动作,该连杆机构由具有相对于车身的第一转动连结点和相对于所述开闭体的第二转动连结点的第一连杆臂和第二连杆臂形成,在所述开闭体的闭侧端部设置有开闭体侧卡合部,在通过所述开闭体的开闭动作与该开闭体的所述闭侧端部接触分离的车身开口部的闭侧端部设置有车身侧卡合部,并且所述开闭体侧卡合部和所述车身侧卡合部的一方侧具备引导卡合部,所述开闭体侧卡合部和所述车身侧卡合部的另一方侧具备引导槽,该引导槽具有彼此相对的一对侧壁部,并沿所述开闭体的开闭动作方向延伸,在设定于所述开闭体的全闭位置附近的特定动作区间中,通过所述开闭体侧卡合部相对于所述车身侧卡合部正确地卡合而在所述引导卡合部配置于所述引导槽内的状态下引导所述开闭体的开闭动作,所述车辆用开闭体控制装置具备卡合不良检测部,在所述开闭体的全闭控制时,该卡合不良检测部根据所述特定动作区间中的电机电流值的变化来检测所述开闭体侧卡合部相对于所述车身侧卡合部的卡合不良。
即,电机电流值根据电机的负荷而变化。而且,在设定于开闭体的全闭位置附近的特定动作区间中,作为开闭体的驱动源的电机的负荷根据设置于开闭体的闭侧端部的开闭体侧卡合部与设置于车身开口部的闭侧端部的车身侧卡合部的卡合状态而变化。并且,由此,在开闭体的全闭控制时,能够根据特定动作区间中的电机电流值的变化来推定开闭体侧卡合部相对于车身侧卡合部的卡合状态。因此,根据上述结构,能够以简单的结构精度良好地检测开闭体侧卡合部相对于车身侧卡合部的卡合不良。并且,由此,能够使开闭体正确地进行全闭动作。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,所述卡合不良检测部根据所述特定动作区间中所述电机电流值发生特征性变化的所述开闭动作位置来检测所述卡合不良。
即,在开闭体侧卡合部相对于车身侧卡合部正确地卡合的情况下,每次在大致相同的时刻,在特定动作区间中检测到的电机电流值发生特征性变化。但是,在发生了卡合不良的情况下,该特征性电流变化的发生时刻产生偏差。因此,根据上述结构,能够以简单的结构精度良好地检测开闭体侧卡合部相对于车身侧卡合部的卡合不良。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,在所述特定动作区间中最初检测到所述电机电流值的上升的第一上升位置相比于预先设定的第一基准上升位置位于闭动作侧的情况下,所述卡合不良检测部判定为发生了所述卡合不良。
即,通过开闭体进入特定动作区间,从而开闭体侧卡合部与车身侧卡合部卡合。并且,由此,通过作为驱动源的电机的负荷增大,电机电流值表现出最初的上升。但是,在发生了开闭体侧卡合部相对于车身侧卡合部的卡合不良的情况下,在该电机电流值产生的最初的上升时刻容易发生延迟。因此,根据上述结构,能够以简单的结构精度良好地检测开闭体侧卡合部相对于车身侧卡合部的卡合不良。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,在所述特定动作区间中最初检测到所述电机电流值的波峰的第一峰位置相比于预先设定的第一基准峰位置位于闭动作侧的情况下,所述卡合不良检测部判定为发生了所述卡合不良。
即,即使在开闭体侧卡合部相对于车身侧卡合部卡合之后,通过卡合位置位移,也会容许朝向全闭位置的开闭体的闭动作。并且,由此,电机的负荷降低,因开闭体侧卡合部相对于车身侧卡合部的卡合而上升的电机电流值表现出最初的波峰。但是,在发生了开闭体侧卡合部相对于车身侧卡合部的卡合不良的情况下,该最初的波峰出现的时刻容易发生延迟。因此,根据上述结构,能够以简单的结构精度良好地检测开闭体侧卡合部相对于车身侧卡合部的卡合不良。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,在所述特定动作区间中第二次检测到所述电机电流值的上升的第二上升位置相比于预先设定的第二基准上升位置位于开动作侧的情况下,所述卡合不良检测部判定为发生了所述卡合不良。
即,通过开闭体接近全闭位置,该开闭体的一部分与车身开口部抵接。并且,由此,作为驱动源的电机的负荷增大,从而电机电流值上升。但是,在发生了开闭体侧卡合部相对于车身侧卡合部的卡合不良的情况下,在该电机电流值产生的第二次的上升时刻容易提前。因此,根据上述结构,能够以简单的结构精度良好地检测开闭体侧卡合部相对于车身侧卡合部的卡合不良。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,在所述特定动作区间中最后检测到所述电机电流值的最大值的最大值检测最终位置相比于预先设定的基准最大值检测最终位置位于开动作侧的情况下,所述卡合不良检测部判定为发生了所述卡合不良
即,在开闭体的一部分与车身开口部抵接的状态下,由于该开闭体被闭驱动,从而成为电机电流值连续地更新最大值的状态。并且,在发生了开闭体侧卡合部相对于车身侧卡合部的卡合不良的情况下,最后检测到该电机电流值的最大值的时刻容易提前。因此,根据上述结构,能够以简单的结构精度良好地检测开闭体侧卡合部相对于车身侧卡合部的卡合不良。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,在检测到所述卡合不良的情况下,所述驱动控制部使所述开闭体进行反转动作。
根据上述结构,能够迅速地消除在全闭控制时发生的开闭体侧卡合部相对于车身侧卡合部的卡合不良。并且,由此能够使开闭体正确地进行全闭动作。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,
所述车身开口部是设置于所述车身的侧面的门开口部,所述开闭体是对所述门开口部进行开闭的门,所述引导槽具有在车宽方向上相对的所述一对侧壁部,并且所述引导卡合部是沿所述车辆的上下方向延伸的轴状卡合部。
根据上述结构,通过在引导槽内配置轴状卡合部,限制了车宽方向上的门的位移。并且,由此,即使在第一连杆臂和第二连杆臂的距离靠近而容易成为直线地排列的状态的全闭位置附近,也能够稳定地支承门。但是,通过被连杆机构支承的门因外力的输入等而摆动,可能发生门侧卡合部相对于车身侧卡合部的卡合不良。因此,通过应用这样的结构,能够得到更显著的效果。
在解决上述技术问题的车辆用开闭体控制装置中,优选的是,在所述第一连杆臂和第二连杆臂中的至少任一方设置有连结长度可变机构,该连结长度可变机构能够变更所述第一转动连结点和第二转动连结点间的连结长度。
根据上述结构,能够根据连结长度可变机构的动作提高开闭动作的自由度。并且,由此,能够在通过引导卡合部配置于引导槽内而引导开闭体的状态下,顺畅地使该开闭体进行开闭动作。但是,通过基于连结长度可变机构的动作提高了开闭动作的自由度,因此开闭体的摆动也存在容易变大的倾向。并且,由此,容易发生开闭体侧卡合部相对于车身侧卡合部的卡合不良。因此,通过应用这样的结构,能够得到更显著的效果。
发明的效果
根据本发明,能够使开闭体正确地进行全闭动作。
附图说明
图1是门装置的立体图。
图2是门装置的立体图。
图3是形成连杆机构的第一连杆臂和第二连杆臂的俯视图。
图4是形成连杆机构的第一连杆臂和第二连杆臂的俯视图。
图5是形成连杆机构的第一连杆臂和第二连杆臂的俯视图。
图6是形成连杆机构的第一连杆臂和第二连杆臂的俯视图。
图7是门侧卡合部和车身侧卡合部的概略结构图。
图8是表示门侧卡合部和车身侧卡合部的配置的说明图。
图9是表示门侧卡合部和车身侧卡合部的配置的门和门开口部的立体图。
图10是构成连结长度可变机构的关节连杆机构的俯视图。
图11是构成连结长度可变机构的关节连杆机构的俯视图。
图12是门装置的控制框图。
图13是门侧卡合部相对于车身侧卡合部正确地卡合的情况的示意图。
图14是门侧卡合部相对于车身侧卡合部的卡合发生了不良的情况的示意图。
图15是表示在全闭位置附近设定的特定动作区间中的电机电流值的变化的曲线图。
图16是表示在特定动作区间中检测出电机电流值产生的特征性变化时的处理顺序的流程图。
图17是表示基于第一上升位置的检测的卡合不良判定的处理顺序的流程图。
图18是表示基于第一峰位置的检测的卡合不良判定的处理顺序的流程图。
图19是表示基于第二上升位置的检测的卡合不良判定的处理顺序的流程图。
图20是表示基于最大值检测最终位置的检测的卡合不良判定的处理顺序的流程图。
图21是表示在检测到卡合不良的情况下执行的反转控制的处理顺序的流程图。
符号说明
1…车辆
3…门开口部(车身开口部)
5…门(开闭体)
11…第一连杆臂
12…第二连杆臂
15…连杆机构
20…门装置
23…电机
25…致动器
31…门侧卡合部
32…车身侧卡合部
33、34…闭侧端部
41…轴状卡合部(引导卡合部)
42…引导槽
42a、42b…侧壁部
70…门ECU
80…车辆用开闭体控制装置
85…驱动控制部
90…卡合不良检测部
X1…第一转动连结点
X2…第二转动连结点
P0…全闭位置
D…特定动作区间
I…电机电流值
具体实施方式
以下,按照附图,对将车辆用开闭体控制装置具体化至车辆的门装置的一实施方式进行说明。
如图1和图2所示,本实施方式的车辆1具备设置于车身2的侧面2s的门开口部3。并且,在该门开口部3设置有将车辆1的门5支承于该门开口部3的第一连杆臂11和第二连杆臂12。
详细而言,在本实施方式的车辆1中,这些第一连杆臂11和第二连杆臂12分别具有相对于车身2的第一转动连结点X1和相对于门5的第二转动连结点X2。具体而言,第一连杆臂11在被轴支承于沿上下方向(各图中,上下方向)延伸的支轴N1a的状态下与车身2连结,且在被轴支承于沿上下方向延伸的支轴N1b的状态下与门5连结。并且,第二连杆臂12也在被轴支承于沿上下方向延伸的支轴N2a的状态下与车身2连结,且在被轴支承于沿上下方向延伸的支轴N2b的状态下与门5连结。
即,如图3~图6所示,在本实施方式的车辆1中,这些第一连杆臂11和第二连杆臂12形成具有作为四节连杆的结构的连杆机构15。并且,本实施方式的车辆1构成为,基于该连杆机构15的动作而使被支承于门开口部3的门5进行开闭动作。
更详细而言,如图1和图2所示,本实施方式的车辆1使用这些第一连杆臂11和第二连杆臂12将门5支承于车辆后方侧(图1中为左侧,图2中为右侧)的门开口部3。在本实施方式的车辆1中,这些第一连杆臂11和第二连杆臂12分别具有第一转动连结点X1,该第一转动连结点X1在门开口部3的后缘部3r附近相对于车身2能够转动地连结。并且,在本实施方式的车辆1中,这些第一连杆臂11和第二连杆臂12在上下方向上分离地配置。
在本实施方式的车辆1中,第一连杆臂11相比于第二连杆臂12设置于上方。另外,第一连杆臂11具有第二转动连结点X2,该第二转动连结点X2在门5的前后方向大致中央位置相对于该门5能够转动地连结。另一方面,第二连杆臂12具有第二转动连结点X2,该第二转动连结点X2在门5的前端部5f附近与该门5连结。并且,在本实施方式的车辆1中,由此形成门装置20,该门装置20基于第一连杆臂11和第二连杆臂12所形成的连杆机构15的动作来使门5进行开闭动作。
具体而言,如图3~图6所示,在本实施方式的门装置20中,在门5的开动作时,第一连杆臂11和第二连杆臂12分别绕其第一转动连结点X1向各图中的逆时针方向转动。并且,由此,被这些第一连杆臂11和第二连杆臂12支承的车辆1的门5向车辆后方侧(各图中,左侧)进行开动作。
另外,在本实施方式的门装置20中,在门5的闭动作时,第一连杆臂11和第二连杆臂12分别绕其第一转动连结点X1向各图中的顺时针方向转动。并且,由此成为被这些第一连杆臂11和第二连杆臂12支承的车辆1的门5向车辆前方侧(各图中,右侧)进行闭动作的结构。
进一步,本实施方式的门装置20基于第一连杆臂11和第二连杆臂12所形成的连杆机构15的动作,以描绘圆弧状轨迹Rg的方式规定门5的开闭动作轨迹R。即,如图5所示,在第一连杆臂11和第二连杆臂12成为沿车宽方向(图3~图6中,上下方向)延伸的状态的中间位置处,向车辆前后方向的移动分量变大。并且,如图3和图4所示,门5的开闭动作位置越靠近全闭位置P0,第一连杆臂11和第二连杆臂12就越成为沿车辆前后方向(图3~图6中,左右方向)延伸的状态,从而其向车宽方向的移动分量变得越大。
另外,在本实施方式的门装置20中,第一连杆臂11相比第二连杆臂12在更靠近重心G的位置具有相对于门5的第二转动连结点X2。即,在本实施方式的门装置20中,由此,该第一连杆臂11被定位于支撑更大的门载荷的主连杆21。并且,第二连杆臂12被定位于作用的门载荷较小的副连杆22。
此外,在本实施方式的门装置20中,第一连杆臂11具有比第二连杆臂12更大的外形。并且,本实施方式的门装置20由此成为对被定位于主连杆21的第一连杆臂11赋予高支承刚性的结构。
另外,本实施方式的门装置20具备以电机23为驱动源来驱动第一连杆臂11旋转的致动器25。在本实施方式的门装置20中,该致动器25设于第一连杆臂11的基端部分。即,本实施方式的致动器25以使第一连杆臂11转动的方式对该第一连杆臂11和第二连杆臂12所形成的连杆机构15进行驱动。并且,本实施方式的门装置20由此能够基于该致动器25的驱动力来使门5进行开闭动作。
另外,如图3~图7所示,本实施方式的门装置20具备设置于门5的前端部5f的门侧卡合部31和设置于门开口部3的前缘部3f的车身侧卡合部32。即,在本实施方式的车辆1中,门侧卡合部31设于闭侧端部33,该闭侧端部33位于基于第一连杆臂11和第二连杆臂12所形成的连杆机构15的动作来对车辆1的门开口部3进行开闭的门5的闭动作侧。而且,车身侧卡合部32设于门开口部3的闭侧端部34,该闭侧端部34基于在车辆前后方向上移动的门5的开闭动作而与该门5的闭侧端部33接触分离,即接近或离开。并且,本实施方式的门装置20成为在门5处于全闭位置P0附近的状态下,这些门侧卡合部31和车身侧卡合部32彼此卡合的结构。
详细而言,本实施方式的门侧卡合部31具备沿车辆1的上下方向(图7中,与纸面正交的方向)延伸的轴状卡合部41作为引导卡合部。此外,在本实施方式的门装置20中,作为引导卡合部的该轴状卡合部41具有作为被轴支承为绕沿上下方向延伸的未图示的支轴旋转自如的辊41x的结构。而且,车身侧卡合部32具备引导槽42,该引导槽42具有在车宽方向(图7中,上下方向)上相对的一对侧壁部42a、42b,并沿门5的开闭动作方向延伸。并且,本实施方式的门装置20成为在门5处于全闭位置P0附近的情况下,这些门侧卡合部31和车身侧卡合部32成为以将构成引导卡合部的轴状卡合部41配置于该引导槽42内的状态彼此卡合的结构。
即,通过以夹入于在车宽方向上相对的一对侧壁部42a、42b间的状态将门侧卡合部31的轴状卡合部41配置于车身侧卡合部32的引导槽42内,从而限制车宽方向上的门5的位移。并且,由此,即使在形成连杆机构15的第一连杆臂11和第二连杆臂12容易成为排列状态的全闭位置P0附近,本实施方式的门装置20也能够稳定地支承门5。
此外,如图8和图9所示,本实施方式的门装置20在上下方向上分开的两个位置处具备设于门5的前端部5f的门侧卡合部31、31。而且,该门装置20在同样在上下方向上分开的两个位置处具备设于门开口部3的前缘部3f的车身侧卡合部32、32。并且,本实施方式的门装置20成为在这些门侧卡合部31、31和车身侧卡合部32、32彼此卡合的状态下将门5保持于全闭位置P0的结构。
另外,本实施方式的门装置20具备设于门5的前端部5f和后端部5r的锁定装置35、35。并且,本实施方式的门装置20成为通过构成这些各锁定装置35的未图示的闩锁机构分别与设置于车身2的挡块(省略图示)卡合而将门5约束于全闭位置P0的结构。
另外,如图3~图6所示,在本实施方式的门装置20中,在具有作为副连杆22的定位的第二连杆臂12设置有能够变更第一转动连结点X1和第二转动连结点X2之间的连结长度L的连结长度可变机构50。而且,该连结长度可变机构50向缩短第一转动连结点X1和第二转动连结点X2间的长度的方向施力,即,向缩短基于设置有该连结长度可变机构50的第二连杆臂12的门5的连结长度L的方向施力。并且,本实施方式的门装置20由此成为门5以基于第二连杆臂12的连结长度L被短缩的状态进行开闭动作的结构。
另外,如图3、图4及图7所示,在本实施方式的门装置20中,基于设于第二连杆臂12的连结长度可变机构50的动作,容许在门侧卡合部31与车身侧卡合部32卡合的状态下的门5的开闭动作。具体而言,通过门5在门侧卡合部31与车身侧卡合部32卡合的状态下进行开闭动作,随着基于连结长度可变机构50的动作的连结长度L的变更,轴状卡合部41沿着引导槽42的延伸方向相对位移。并且,在本实施方式的门装置20中,由此,门5的开闭动作轨迹R变化。
即,在本实施方式的门装置20中,在门5向全闭位置P0移动时,通过门侧卡合部31相对于车身侧卡合部32正确地卡合而在轴状卡合部41配置于引导槽42内的状态下引导门5的开闭动作。并且,本实施方式的门装置20由此成为基于连杆机构15的动作的圆弧状轨迹Rg向沿着门开口部3的开口宽度方向的直线状轨迹Rs变化的结构。
具体而言,在本实施方式的门装置20中,在门5的全闭动作时,在门侧卡合部31与车身侧卡合部32卡合的状态下,对该门5赋予闭动作方向的操作力。此外,在本实施方式的门装置20中,作为用于使该门5进行开闭动作的操作力,假定是上述致动器25的驱动力或用户的手动操作。而且,在该情况下,设置于第二连杆臂12的连结长度可变机构50基于闭动作方向的操作力而进行动作,从而根据门侧卡合部31与车身侧卡合部32的卡合状态,基于第二连杆臂12的门5的连结长度L延长。并且,本实施方式的门装置20由此成为被连杆机构15支承的门5以描绘上述那样的直线状轨迹Rs的方式朝向全闭位置P0进行闭动作的结构。
另外,在门5从全闭位置P0进行开动作的情况下,在门侧卡合部31与车身侧卡合部32卡合的状态下,对该门5赋予开动作方向的操作力。而且,在该情况下,通过连结长度可变机构50基于开动作方向的操作力而动作,从而根据门侧卡合部31与车身侧卡合部32的卡合状态,基于第二连杆臂12的门5的连结长度L缩短。并且,本实施方式的门装置20由此成为被连杆机构15支承的门5同样地以描绘直线状轨迹Rs的方式从全闭位置P0进行开动作的结构。
更详细而言,如图10和图11所示,在本实施方式的门装置20中,第二连杆臂12构成为具备车身侧连杆51和门侧连杆52。即,车身侧连杆51具有相对于车身2的第一转动连结点X1。另外,门侧连杆52具有相对于车辆1的门5的第二转动连结点X2。而且,在本实施方式的门装置20中,第二连杆臂12具有将这些车身侧连杆51和门侧连杆52连结为能够转动的结构。并且,本实施方式的门装置20成为由此形成的关节连杆机构60作为连结长度可变机构50发挥功能的结构。
具体而言,本实施方式的门侧连杆52与车身侧连杆51相比,具有作为轴向长度短的所谓的微型臂的结构。另外,车身侧连杆51在其长边方向的一端侧具有相对于车身2的车身侧连结部61。而且,门侧连杆52也在其长边方向的一端侧具有相对于门5的门侧连结部62。并且,这些车身侧连杆51和门侧连杆52分别在长边方向的另一端侧具有彼此连结的中间连结部63、64。
即,在本实施方式的门装置20中,这些中间连结部63、64形成设置于第二连杆臂12的关节连杆机构60的中间连结点X3。另外,第二连杆臂12中,以该中间连结点X3为顶点,车身侧连杆51和门侧连杆52形成三角形。并且,由此成为通过这些车身侧连杆51和门侧连杆52相对转动,作为上述三角形的底边的将第一转动连结点X1和第二转动连结点X2连结的直线的长度、即连结长度L发生变化的结构。
(车辆用开闭体控制装置)
接着,对作为实际安装于本实施方式的门装置20的车辆用开闭体控制装置的功能进行说明。
如图12所示,在本实施方式的门装置20中,致动器25的工作由门ECU70控制。具体而言,本实施方式的门ECU70控制对致动器25的电机23的驱动电力的供给。而且,本实施方式的致动器25具备传递机构71,该传递机构71将通过该驱动电力的供给而旋转的电机23的驱动力向连杆机构15传递。并且,本实施方式的门装置20由此具有作为车辆用开闭体控制装置80的功能,该车辆用开闭体控制装置80将电机23作为驱动源来控制作为被支承于连杆机构15的开闭体的门5的开闭动作。
详细而言,在本实施方式的致动器25设置有脉冲传感器82,该脉冲传感器82输出与构成传递机构71的减速机构的动作同步的脉冲信号Sp。并且,本实施方式的门ECU70基于该脉冲传感器82的脉冲输出来检测被致动器25驱动的门5的开闭动作位置P。
而且,设置于门5、车室内或便携设备等的操作输入部83的输出信号输入至本实施方式的门ECU70。即,本实施方式的门ECU70基于该操作输入部83所输出的操作输入信号Scr来检测使用者对门5的工作要求。并且,本实施方式的门ECU70具备驱动控制部85,该驱动控制部85为了使门5向被要求的开闭动作方向移动而通过对电机23的驱动电力的供给来控制致动器25的工作。
另外,本实施方式的门ECU70检测向致动器25的电机23通电的电流的值,即电机电流值I。而且,在基于驱动控制部85的门5的开闭控制时,门ECU70根据该检测出的电机电流值I来监视门5的开闭动作。即,电机电流值I根据电机23的负荷而变化。并且,本实施方式的门ECU70由此成为在检测到将电机23作为驱动源而进行开闭动作的门5发生了异常的情况下,执行基于检测到的门5的异常的适当的工作控制。
例如,在门5的开闭控制时检测到门5发生了异物的夹入的情况下,本实施方式的门ECU70使该门5的开闭动作方向反转。并且,本实施方式的门装置20由此成为能够迅速地消除门5的夹入的结构。
另外,如上所述,本实施方式的门装置20是在门5处于全闭位置P0附近的情况下,设置于门5的闭侧端部33的门侧卡合部31与设置于门开口部3的闭侧端部34的车身侧卡合部32卡合的结构。并且,本实施方式的门ECU70具备卡合不良检测部90,该卡合不良检测部90在驱动控制部85所执行的门5的全闭控制时,检测该门5发生的上述门侧卡合部31与车身侧卡合部32的卡合不良。
即,如图13所示,在门5向全闭位置P0移动时,通过作为开闭体侧卡合部的门侧卡合部31相对于车身侧卡合部32正确地卡合而将门侧卡合部31的轴状卡合部41配置于车身侧卡合部32的引导槽42内。并且,如上所述,本实施方式的门装置20由此成为引导被连杆机构15支承的门5的开闭动作的结构(参见图7)。
但是,如图14所示,在本实施方式的门装置20中,容许门5绕构成连杆机构15的第一连杆臂11和第二连杆臂12的相对于门5的第二转动连结点X2的转动。因此,在向朝向全闭位置P0移动的门5输入外力等情况下,该门5可能摆动。并且,由此,在门5的全闭控制时,门侧卡合部31不能相对于车身侧卡合部32正确地卡合,即,可能发生不能将门侧卡合部31的轴状卡合部41配置于车身侧卡合部32的引导槽42内的卡合不良。
考虑到这点,如图12所示,在本实施方式的门装置20中,设置于门ECU70的卡合不良检测部90检查像这样的在门5的全闭控制时发生的门侧卡合部31相对于车身侧卡合部32的卡合不良。并且,本实施方式的门装置20由此成为能够通过电机驱动正确地使门5进行全闭动作的结构。
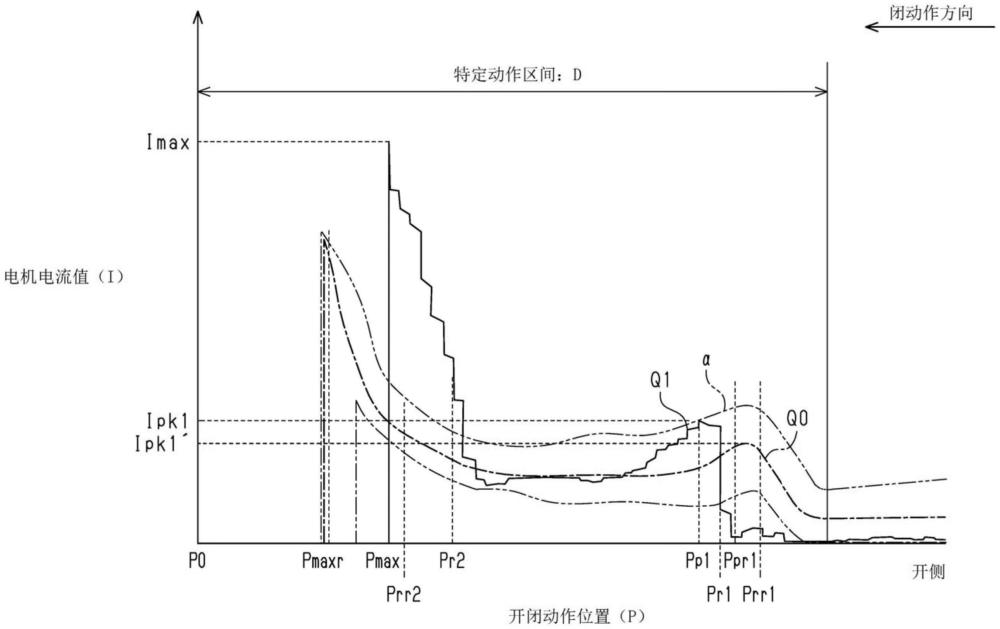
具体而言,如图15所示,在本实施方式的门装置20中,在门侧卡合部31相对于车身侧卡合部32卡合的全闭位置P0附近设定关于门5的开闭动作位置P的特定动作区间D。而且,在基于驱动控制部85的门5的全闭控制时,本实施方式的门ECU70监视因门5进入该特定动作区间D而产生的电机电流值I的变化。并且,本实施方式的卡合不良检测部90成为基于该特定动作区间D中的电机电流值I的变化来检测门侧卡合部31相对于车身侧卡合部32的卡合不良的结构。
(门侧卡合部相对于车身侧卡合部的卡合不良检测)
接着,对本实施方式的门ECU70所执行的门侧卡合部31相对于车身侧卡合部32的卡合不良检测进行说明。
在图15中,单点划线所示的波形Q0表示在门5的全闭控制时,在门侧卡合部31相对于车身侧卡合部32正确地卡合的情况下,电机电流值I产生的特征性变化。另外,同图中,并行地双点划线所示的频带α表示在像这样门侧卡合部31相对于车身侧卡合部32正确地卡合的请下,关于具有与上述波形Q0同样的特征而变化的电机电流值I的波形的振幅。并且,同图中,实线表示的波形Q1表示在门5的全闭控制时,发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下的电机电流值I产生的变化。
即,在门5的全闭控制时,通过该门5进入特定动作区间D,从而门侧卡合部31与车身侧卡合部32卡合。并且,由此,作为驱动源的电机23的负荷增大,从而电机电流值I上升。
另外,通过门5相对于该特定动作区间D的进入而上升的电机电流值I在暂时显示出波峰之后,以比该最初的峰值、即第一峰电流值Ipk1、Ipk1′低的值稳定地推移。这是由于,如上所述,在本实施方式的门装置20中,即使在门侧卡合部31相对于车身侧卡合部32卡合了之后,通过卡合位置位移,而容许朝向全闭位置P0的门5的闭动作。并且,该电机电流值I在之后,由于门5接近全闭位置P0而再次上升。
即,通过门5接近全闭位置P0,该门5的一部分与门开口部3抵接。并且,由此,作为驱动源的电机23的负荷增大,从而电机电流值I上升。
具体而言,在本实施方式的门装置20中,通过门5接近全闭位置P0,设置于该门5的周缘的未图示的密封条等密封部件与门开口部3抵接。另外,本实施方式的驱动控制部85从该状态起进一步继续门5的全闭控制。并且,本实施方式的门装置20由此成为该门5一边压扁与门开口部3抵接的密封部件一边向闭动作方向移动,从而作为驱动源的电机23的负荷增大的结构。
即,在本实施方式的门装置20中,电机电流值I和对应于因门5的闭方向移动而被压扁的密封部件的反作用力的负荷的增大一起上升。并且,本实施方式的门装置20由此成为该上升的电机电流值I在将电机23作为驱动源的门5的闭驱动结束的门5的开闭动作位置P处连续地更新其最大值Imax的结构。
此外,在本实施方式的门装置20中,在构成设置于门5的前端部5f和后端部5r的锁定装置35的各闩锁机构成为半锁状态的位置处,将电机23作为驱动源的门5的闭驱动结束。并且,本实施方式的门装置20成为如下结构:在之后,通过未图示的关闭装置的工作,而将各锁定装置35的闩锁机构从半锁状态向全锁状态转移,由此完成使门5向全闭位置P0移动的全闭控制。
这里,在图15中,比较门侧卡合部31相对于车身侧卡合部32正确地卡合的情况的波形Q0和发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况的波形Q1。并且,由此能够确认到:在门5的全闭控制时,在发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,电机电流值I产生的上述那样的特征性变化的发生时刻产生偏差。
具体而言,在门5的全闭控制时,在发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,因门5相对于特定动作区间D的进入而产生于电机电流值I最初的上升时刻发生延迟。这能够认为是因为,在因门5的摆动而导致轴状卡合部41没有被配置于引导槽42内的状态下,门侧卡合部31相对于车身侧卡合部32卡合的情况下,这些门侧卡合部31和车身侧卡合部32的卡合时刻延迟。并且,由此能够确认,在之后,该上升的电机电流值I出现最初的波峰的时刻也同样的延迟。
进而,与门侧卡合部31相对于车身侧卡合部32正确地卡合的情况相比,发生了卡合不良的情况下该暂时表现出波峰的电机电流值I在之后再次上升的第二次的上升时刻变早。这能够认为是因为,在发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,在这些门侧卡合部31与车身侧卡合部32卡合的状态下,容许门5的闭动作的范围变小。并且,由此,关于之后该上升的电机电流值I最后表现出最大值Imax的时刻也同样地变早。
考虑到这点,如图15和图16所示,在基于驱动控制部85的门5的全闭控制时(步骤101:是),本实施方式的门ECU70判定该门5是否进入了特定动作区间D(步骤102)。接着,在门5进入了特定动作区间D之后(步骤102:是),门ECU70将在电机电流值I中检测到最初的上升的门5的开闭动作位置P检测为第一上升位置Pr1(步骤103)。进而,门ECU70将在之后该上升的电机电流值I表现出最初的波峰的门5的开闭动作位置P检测为第一峰位置Pp1(步骤104)。接着,门ECU70将在上述步骤103中检测出第一峰位置Pp1之后,再次在电机电流值I中检测到上升的门5的开闭动作位置P检测为第二上升位置Pr2(步骤105)。并且,本实施方式的门ECU70将在之后该上升后的电机电流值I最后表现出最大值Imax的门5的开闭动作位置P检测为最大值检测最终位置Pmax(步骤106)。
具体而言,上述步骤103中的第一上升位置Pr1的检测判定例如通过将关于电机电流值I的每单位的增加量、即增大的电机电流值I的变化率与规定的判定阈值进行比较来进行。即,能够将在门5进入了特定动作区间D之后,电机电流值I的增加率超过规定的判定阈值的时刻的门5的开闭动作位置P检测为在特定动作区间D中最初检测到的电机电流值I的第一上升位置Pr1。另外,第一上升位置Pr1的检测也能够通过将相对于在进入特定动作区间D之前的低负荷时电机电流值I稳定地推移的状况下检测出的基准值的增加量与关于该增加量预先设定的规定的判定阈值进行比较来进行。并且,该第一上升位置Pr1的检测也能够更单纯地通过将进入特定动作区间D后检测出的电机电流值I与关于该检测值预先设定的规定的判定阈值进行比较来进行。
而且,上述步骤104中的第一峰位置Pp1的检测判定例如在第一上升位置Pr1的检测后,根据与新检测到的电机电流值I的最大值Imax相关的更新记录来进行。即,在门5在规定的判定区间向闭动作方向移动的期间内,没有更新新的电机电流值I的最大值Imax的情况下,能够追溯到最后更新最大值Imax的开闭动作位置P,并将其检测为第一峰位置Pp1。
另外,上述步骤104中的第二上升位置Pr2的检测判定在第一峰位置Pp1的检测后,通过与上述第一上升位置Pr1的检测判定同样地,将电机电流值I的增加率与规定的判定阈值比较来进行。并且,该第二上升位置Pr2的检测判定也能够在第一峰位置Pp1的检测后,通过相对于在电机电流值I稳定地推移的状况下检测出的基准值的增加量与判定阈值的比较,或电机电流值I与判定阈值的比较来进行。
此外,在该情况下,各判定阈值分别使用预先设定为第二上升位置Pr2的检测判定用的专用的值。另外,例如,在增加量与判定阈值的比较中,也可以将在第一峰位置Pp1的检测后,以低于第一峰电流值Ipk1的值稳定地推移的电机电流值I的平均作为基准值。并且,在第一峰位置Pp1的检测后,检测出的电机电流值I超过第一峰电流值Ipk1的情况下,也能够检测为在特定动作区间D中第二个检测到的电机电流值I的第二上升位置Pr2。
进而,关于上述步骤106中的最大值检测最终位置Pmax的检测判定,例如,也能够根据在第二上升位置Pr2的检测后,与新检测到的电机电流值I的最大值Imax相关的更新记录来进行。但是,如上所述,在本实施方式的门装置20中,从规格上来说,在将电机23作为驱动源的门5的闭驱动结束时,电机电流值I表现出最大值Imax。因此,也能够将结束了门5的闭驱动的位置设为最大值检测最终位置Pmax。
像这样,本实施方式的门ECU70在门5进入特定动作区间D之后,将在电机电流值I产生的这些特征性变化与变化产生的时刻的开闭动作位置P关联起来而依次检测。而且,在向特定动作区间D的进入后,门侧卡合部31相对于车身侧卡合部32正确地卡合的情况下,本实施方式的门ECU70将与在电机电流值I产生这些特征性变化的门5的开闭动作位置P对应的值分别保持为基准值。并且,本实施方式的卡合不良检测部90通过将这些检测值和基准值分别进行比较,而根据特定动作区间D中的电机电流值I的变化,来检测门侧卡合部31相对于车身侧卡合部32的卡合不良。详细而言,是如下结构:根据门5进入特定动作区间D之后在电机电流值I产生的特征性变化的发生时刻来检测全闭控制时发生的门侧卡合部31相对于车身侧卡合部32的卡合不良。
详细而言,如图17所示,本实施方式的卡合不良检测部90在检测到第一上升位置Pr1的情况下(步骤201:是),读取保持于门ECU70的存储区域70x的第一基准上升位置Prr1(步骤202)。即,该第一基准上升位置Prr1是在门侧卡合部31相对于车身侧卡合部32正确地卡合的情况下,与在特定动作区间D中最初检测到电机电流值I的上升的门5的开闭动作位置P对应的预先设定的基准值。并且,卡合不良检测部90将在该步骤202中读取的第一基准上升位置Prr1与在上述步骤201中检测到的第一上升位置Pr1进行比较(步骤203)。
即,本实施方式的卡合不良检测部90在该步骤203中,判定作为检测值的第一上升位置Pr1与作为基准值的第一基准上升位置Prr1相比是否位于闭动作侧。即,判定在门5进入特定动作区间D之后,在电机电流值I产生的最初的上升时刻是否延迟(参见图15)。并且,在第一上升位置Pr1相比于第一基准上升位置Prr1位于闭动作侧的情况下(步骤203:是),卡合不良检测部90判定为发生了门侧卡合部31相对于车身侧卡合部32的卡合不良(步骤204)。
另外,如图18所示,本实施方式的卡合不良检测部90在检测到第一峰位置Pp1的情况下(步骤301:是),读取保持于门ECU70的存储区域70x的第一基准峰位置Ppr1(步骤302)。即,该第一基准峰位置Ppr1是与在门侧卡合部31相对于车身侧卡合部32正确地卡合的情况下,在特定动作区间D中电机电流值I最初表现出波峰的门5的开闭动作位置P对应地预先设定的基准值。并且,卡合不良检测部90将在该步骤302中读取的第一基准峰位置Ppr1与在上述步骤301中检测到的第一峰位置Pp1进行比较(步骤303)。
即,本实施方式的卡合不良检测部90在该步骤303中,判定作为检测值的第一峰位置Pp1相比于作为基准值的第一基准峰位置Ppr1是否位于闭动作侧。即,判定在门5进入特定动作区间D之后,上升的电机电流值I最初表现出波峰的时刻是否发生延迟(参见图15)。并且,在第一峰位置Pp1相比于第一基准峰位置Ppr1位于闭动作侧的情况下(步骤303:是),卡合不良检测部90判定为发生了门侧卡合部31相对于车身侧卡合部32的卡合不良(步骤304)。
另外,如图19所示,本实施方式的卡合不良检测部90在检测到第二上升位置Pr2的情况下(步骤401:是),读取保持于门ECU70的存储区域70x的第二基准上升位置Prr2(步骤402)。即,该第二基准上升位置Prr2是与在门侧卡合部31相对于车身侧卡合部32正确地卡合的情况下,在特定动作区间D中第二次检测到电机电流值I的上升的门5的开闭动作位置P对应地预先设定的基准值。并且,卡合不良检测部90将在该步骤402中读取的第二基准上升位置Prr2与在上述步骤401中检测到的第二上升位置Pr2进行比较(步骤403)。
即,本实施方式的卡合不良检测部90在该步骤403中,判定作为检测值的第二上升位置Pr2相比于作为基准值的第二基准上升位置Prr2是否位于开动作侧。即,判定在门5进入特定动作区间D之后,在电机电流值I产生的第二次上升时刻是否提前(参见图15)。并且,在第二上升位置Pr2相比于第二基准上升位置Prr2位于开动作侧的情况下(步骤403:是),卡合不良检测部90判定为发生了门侧卡合部31相对于车身侧卡合部32的卡合不良(步骤404)。
另外,如图20所示,本实施方式的卡合不良检测部90在检测到最大值检测最终位置Pmax的情况下(步骤501:是),读取保持于门ECU70的存储区域70x的基准最大值检测最终位置Pmaxr(步骤502)。即,该基准最大值检测最终位置Pmaxr是与在门侧卡合部31相对于车身侧卡合部32正确地卡合的情况下,在特定动作区间D中最后检测到电机电流值I的最大值Imax的门5的开闭动作位置P对应地预先设定的基准值。并且,卡合不良检测部90将在该步骤502中读取的基准最大值检测最终位置Pmaxr与在上述步骤501中检测到的最大值检测最终位置Pmax进行比较(步骤503)。
即,本实施方式的卡合不良检测部90在该步骤503中,判定作为检测值的最大值检测最终位置Pmax相比于作为基准值的基准最大值检测最终位置Pmaxr是否位于开动作侧。即,判定在门5进入特定动作区间D之后,最后检测到电机电流值I的最大值Imax的时刻是否提前(参见图15)。并且,在最大值检测最终位置Pmax相比于基准最大值检测最终位置Pmaxr位于开动作侧的情况下(步骤503:是),卡合不良检测部90判定为发生了门侧卡合部31相对于车身侧卡合部32的卡合不良(步骤504)。
在这些图17~图20所示的上述各卡合不良判定的任一个中判定为发生了卡合不良的情况下,本实施方式的卡合不良检测部90检测门侧卡合部31相对于车身侧卡合部32的卡合不良。另外,在上述各卡合不良判定中,作为基准值的第一基准上升位置Prr1、第一基准峰位置Ppr1、第二基准上升位置Prr2、基准最大值检测最终位置Pmaxr分别通过实验、仿真等而设定为最适当的值。并且,本实施方式的门ECU70是将这些各值预先保持于存储区域70x的结构(参见图12)。
另外,如图21所示,在检测到门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下(步骤601:是),本实施方式的门ECU70执行门5的反转控制(步骤602)。即,在通过卡合不良检测部90检测到卡合不良的情况下,通过驱动控制部85执行门5的开驱动。并且,本实施方式的门装置20由此成为能够消除在全闭控制时发生的门侧卡合部31相对于车身侧卡合部32的卡合不良的结构。
接着,对本实施方式的作用进行说明。
即,在门5的全闭控制时,在门侧卡合部31相对于车身侧卡合部32卡合的特定动作区间D中,通过门5进入该特定动作区间D,从而在电机电流值I产生特征性变化。并且,在本实施方式的门装置20中,根据该特定动作区间D中的电机电流值I的变化,来检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
接着,对本实施方式的效果进行说明。
(1)门装置20通过门ECU70控制致动器25的工作而具有作为车辆用开闭体控制装置80的功能。门ECU70具备将电机23作为驱动源来使车辆1的门5进行开闭动作的驱动控制部85。作为开闭体的门5基于第一连杆臂11和第二连杆臂12所形成的连杆机构15的动作进行开闭动作,该第一连杆臂11和第二连杆臂12具有相对于车身2的第一转动连结点X1和相对于门5的第二转动连结点X2。另外,在门5的闭侧端部33设有具备轴状卡合部41的门侧卡合部31,在门开口部3的闭侧端部34设有车身侧卡合部32,该车身侧卡合部32具备引导槽42,该引导槽42具有相对的一对侧壁部42a、42b,并沿门5的开闭动作方向延伸。而且,在设定在门5的全闭位置P0附近的特定动作区间D中,通过作为引导卡合部的门侧卡合部31相对于车身侧卡合部32正确地卡合,而在轴状卡合部41配置于引导槽42内的状态下,门5的开闭动作被引导。并且,门ECU70具备卡合不良检测部90,在门5的全闭控制时,该卡合不良检测部90根据特定动作区间D中的电机电流值I的变化来检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
即,电机电流值I根据电机23的负荷而变化。而且,在设定在门5的全闭位置P0附近的特定动作区间D中,作为驱动源的电机23的负荷根据设置在门5的闭侧端部33的门侧卡合部31与设置在门开口部3的闭侧端部34的车身侧卡合部32的卡合状态而变化。并且,由此能够在门5的全闭控制时,根据特定动作区间D中的电机电流值I的变化来推定门侧卡合部31相对于车身侧卡合部32的卡合状态。因此,根据上述结构,能够以简单的结构精度良好地检测门侧卡合部31相对于车身侧卡合部32的卡合不良。并且,由此能够使门5正确地进行全闭动作。
(2)卡合不良检测部90根据在特定动作区间D中在电机电流值I产生的特征性变化的发生时刻来检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
即,在门侧卡合部31相对于车身侧卡合部32正确地卡合的情况下,每次在大致相同的时刻,在特定动作区间D中检测到的电机电流值I发生特征性变化。但是,在发生卡合不良的情况下,该特征性的电流变化的发生时刻产生偏差。因此,根据上述结构,能够以简单的结构精度良好地检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
(3)在特定动作区间D中最初检测到电机电流值I的上升的第一上升位置Pr1相比于预先设定的第一基准上升位置Prr1位于闭动作侧的情况下,卡合不良检测部90判定为发生了卡合不良。
即,通过门5进入特定动作区间D,门侧卡合部31与车身侧卡合部32卡合。并且,由此,作为驱动源的电机23的负荷增大,因此电机电流值I表现出最初的上升。但是,在发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,在该电机电流值I产生的最初的上升时刻容易发生延迟。因此,根据上述结构,能够以简单的结构精度良好地检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
(4)在特定动作区间D中最初检测到电机电流值I的波峰的第一峰位置Pp1相比于预先设定的第一基准峰位置Ppr1位于闭动作侧的情况下,卡合不良检测部90判定为发生了卡合不良。
即,即使在门侧卡合部31相对于车身侧卡合部32卡合之后,由于卡合位置位移,也会容许朝向全闭位置P0的门5的闭动作。并且,由此,由于电机23的负荷降低,因门侧卡合部31相对于车身侧卡合部32的卡合而上升的电机电流值I表现出最初的波峰。但是,在发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,该最初的波峰出现的时刻容易发生延迟。因此,根据上述结构,能够以简单的结构精度良好地检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
(5)在特定动作区间D中第二次检测到电机电流值I的上升的第二上升位置Pr2相比于预先设定的第二基准上升位置Prr2位于开动作侧的情况下,卡合不良检测部90判定为发生了卡合不良。
即,通过门5接近全闭位置P0,该门5的一部分与门开口部3抵接。并且,由此,作为驱动源的电机23的负荷增大,从而电机电流值I上升。但是,在发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,在该电机电流值I产生的第二次的上升时刻容易提前。因此,根据上述结构,能够以简单的结构精度良好地检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
(6)在特定动作区间D中最后检测到电机电流值I的最大值Imax的最大值检测最终位置Pmax相比于预先设定的基准最大值检测最终位置Pmaxr位于开动作侧的情况下,卡合不良检测部90判定为发生了卡合不良。
即,在门5的一部分与门开口部3抵接的状态下,通过该门5被闭驱动,从而成为电机电流值I连续地更新最大值Imax的状态。并且,在发生了门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,最后检测到电机电流值I的最大值Imax的时刻容易提前。因此,根据上述结构,能够以简单的结构精度良好地检测门侧卡合部31相对于车身侧卡合部32的卡合不良。
(7)在检测到门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,驱动控制部85使门5反转动作。
根据上述结构,能够迅速地消除在全闭控制时发生的门侧卡合部31相对于车身侧卡合部32的卡合不良。并且,由此能够使门5正确地进行全闭动作。
(8)引导槽42具有在车宽方向上相对的一对侧壁部42a、42b。并且,作为引导卡合部的轴状卡合部41沿车辆1的上下方向延伸。
根据上述结构,通过在引导槽42内配置轴状卡合部41而限制了车宽方向上的门5的位移。并且,由此,即使在第一连杆臂11和第二连杆臂12的距离接近而容易成为直线地排列的状态的全闭位置P0附近,也能够稳定地支承门5。但是,由于被连杆机构15支承的门5因外力的输入等而摆动,从而可能发生门侧卡合部31相对于车身侧卡合部32的卡合不良。因此,通过应用这样的结构,能够得到更显著的效果。
(9)在第二连杆臂12设有能够变更第一转动连结点X1和第二转动连结点X2间的连结长度L的连结长度可变机构50。
根据上述结构,能够根据连结长度可变机构50的动作来提高开闭动作的自由度。并且,由此能够在通过轴状卡合部41配置于引导槽42内而引导门5的状态下顺畅地使该门5进行开闭动作。但是,由于根据连结长度可变机构50的动作提高了开闭动作的自由度,因此门5的摆动也存在容易变大的倾向。并且,由此容易发生门侧卡合部31相对于车身侧卡合部32的卡合不良。因此,通过应用这样的结构,能够得到更显著的效果。
此外,上述实施方式能够如以下那样变更而实施。上述实施方式和以下的变更例能够在技术上不矛盾的范围内彼此组合而实施。
在上述实施方式中,执行基于第一上升位置Pr1、第一峰位置Pp1、第二上升位置Pr2以及最大值检测最终位置Pmax的检测的各卡合不良判定。并且,在这些各卡合不良判定中的任一个中判定为发生了卡合不良的情况下,检测门侧卡合部31相对于车身侧卡合部32的卡合不良。但是,不限于此,也可以是执行基于在特定动作区间D中在电机电流值I产生的这些特征性变化的卡合不良判定中的任一个、任两个或任三个的结构。
另外,也可以是通过组合多个卡合不良判定来确定卡合不良的检测的结构。例如,也可以是当在基于第一上升位置Pr1的检测的卡合不良判定中判定为发生了卡合不良,且在基于第一峰位置Pp1的检测的卡合不良判定中判定为发生了卡合不良的情况下,检测卡合不良等的结构。
而且,也可以是除了第一上升位置Pr1、第一峰位置Pp1、第二上升位置Pr2以及最大值检测最终位置Pmax的检测以外,基于在电机电流值I产生的特征性变化的检测来进行卡合不良判定的结构。即,关于用于卡合不良判定的特征性的电机电流值I的变化可以任意地设定,特征性变化的检测方法也是任意的。并且,关于用于卡合不良判定的基准值也可以任意地设定。
在上述实施方式中,在门5进入特定动作区间D之后,将在电机电流值I产生的特征性变化与其发生时刻处的门5的开闭动作位置P关联起来检测。并且,由此,根据在特定动作区间D中在电机电流值I产生的特征性变化的发生时刻来检测门侧卡合部31相对于车身侧卡合部32的卡合不良。但是,不限于此,也可以是将在特定动作区间D中在电机电流值I产生的特征性变化与门5进入特定动作区间D后的经过时间关联起来检测的结构。
另外,也可以是不依赖发生时刻,而是根据在特定动作区间D中在电机电流值I产生的变化的大小来检测门侧卡合部31相对于车身侧卡合部32的卡合不良的结构。并且,也可以是通过特征性变化的发生时刻和其变化的大小的组合来检测门侧卡合部31相对于车身侧卡合部32的卡合不良的结构。
在上述实施方式中,通过将门5进入特定动作区间D之后检测到的检测值与对应于门侧卡合部31相对于车身侧卡合部32正确地卡合的情况而预先设定的基准值的比较来进行卡合不良判定。但是,不限于此,只要是根据特定动作区间D中的电机电流值I的变化来检测卡合不良的结构,也可以是例如使用通过机器学习生成的判定模型直接从变化的波形进行判定等,任意地变更卡合不良判定的方法。
在上述实施方式中,在检测到门侧卡合部31相对于车身侧卡合部32的卡合不良的情况下,执行门5的反转控制。但是,不限于此,也可以是具备所谓的重试功能的结构,该重试功能通过执行反转控制向开动作方向驱动门5,并在消除了卡合不良之后,再次执行该门5的全闭控制。而且,也可以是在检测到卡合不良的情况下,输出表示其发生的警告音、警告显示等的结构。并且,也可以不进行反转控制,而是通过进行这样的警告输出,催促使用者执行消除卡合不良的操作的结构。
在上述实施方式中,门侧卡合部31具有作为引导卡合部的轴状卡合部41,车身侧卡合部32具有引导槽42。但是,不限于此,也可以是门侧卡合部31具有引导槽42,车身侧卡合部32具有轴状卡合部41的结构。
另外,轴状卡合部41具有作为被轴支承为绕支轴旋转自如的辊41x的结构,但也可以是轴状卡合部41不旋转的结构。而且,引导卡合部也可以不一定具有轴形状。并且,关于引导槽42的形状也可以任意地变更。即,只要是在通过作为开闭体侧卡合部的门侧卡合部31相对于车身侧卡合部32正确地卡合而将引导卡合部配置于引导槽42内的状态下引导门5的开闭动作的结构即可。
在上述实施方式中,具体化为将设置于车身2的侧面2s的门开口部3作为车身开口部,并使设置于该门开口部3的门5进行开闭动作的门装置20。但是,不限于此,也可以应用于例如使设置于向车辆1的后方开口的后舱口等那样门开口部3以外的车身开口部的开闭体进行开闭动作的结构。
在上述实施方式中,在第二连杆臂12设置有连结长度可变机构50。但是,不限于此,也可以应用于在第一连杆臂11设置连结长度可变机构50的结构。并且,也可以应用于在第一连杆臂11和第二连杆臂12这两方设置连结长度可变机构50的结构。
另外,在上述实施方式中,连结长度可变机构50具有作为关节连杆机构60的结构,该关节连杆机构60将具有第一转动连结点X1的车身侧连杆51和具有第二转动连结点X2的门侧连杆52连结为能够转动。但是,不限于此,关于连结长度可变机构50的结构,也可以使用直动式的伸缩连杆机构等,进行任意地变更。并且,只要是在通过门侧卡合部31相对于车身侧卡合部32正确地卡合而将引导卡合部配置于引导槽42内的状态下引导门5的开闭动作的结构,则也可以应用于不设置这样的连结长度可变机构50的结构。