一种潮汐式套囊气压调节装置
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及医疗器械中的机械通气技术领域,特别是涉及一种潮汐式套囊气压调节装置。
背景技术
建立人工气道进行机械通气是救治危重患者的重要措施,套囊管理是人工气道管理的重要组成部分,套囊压力管理不善,会给患者带来严重影响,按现行指南,套囊压力应当设置于25~30cmH
当肺处于病理状态,如ARDS等,肺的顺应性变小。肺进行小潮气量通气时,所需压力也有可能大于30cmH
但目前,套囊压力安全范围为25-30cmH
为解决上述矛盾,曾经要求4-6小时放气一次,放气时间为5-10分钟,但因为放气与保持套囊气压的时间不匹配,放气时间过短,不能恢复局部毛细血管供血,且当患者病情危重时,不能耐受5-10分钟的非密闭条件下通气,故该方式逐渐被淘汰。人体组织压力性损伤的基本原理:正常毛细血管内压力为12~30mmHg(1.33cmH
发明内容
针对上述问题,本发明提供了一种潮汐式套囊气压调节装置,解决了目前套囊压力与气道压力不匹配,导致气管损伤与通气管路的密闭性不能兼顾的技术问题。
本发明的技术方案是:一种潮汐式套囊气压调节装置,包括人工气道,所述人工气道的接头与呼吸机的呼吸管路连通,所述人工气道上有套囊,所述套囊与气压调节器连接,所述气压调节器与气压控制系统连接,所述气压控制系统接收所述呼吸机呼吸管路内的气压信号和所述气压调节器内的气压信号,并控制所述气压调节器动作,调节套囊的压力。
优选的,所述气压调节器包括气压调节泵,所述气压调节泵与所述套囊通过导管连通。
优选的,所述气压调节泵包括泵壳、活塞单元和驱动单元;所述泵壳是中空的柱体;所述驱动单元驱动所述活塞单元行走的方向和距离。
优选的,所述活塞单元位于所述泵壳内,且所述活塞单元将中空的泵壳分为第一空间和第二空间;所述活塞单元与所述驱动单元连接;在所述驱动单元的带动下,所述活塞单元在所述泵壳内部往返移动,从而改变所述第一空间和所述第二空间的体积。
优选的,所述气压控制系统包括中央处理模块和气压传感器,所述气压传感器设于所述呼吸机的Y形管道内及所述第一空间内,所述中央处理模块分别与所述压力传感器和所述驱动单元电连接。
优选的,所述气压控制系统包括中央处理模块、第一气压传感器和第二气压传感器,所述第一气压传感器设置于所述呼吸机的Y形管道内,且所述第一气压传感器位于所述呼吸机的Y形管道与人工气道连接处,所述第二气压传感器设置于所述第一空间内,所述中央处理模块分别与所述第一压力传感器、所述第二压力传感器和所述驱动单元电连接。
优选的,所述中央处理模块采用PLC模块。
本发明的有益效果是:
呼吸机内的气压信号传递至气压控制系统,并控制所述气压调节器动作,气压调节器调节套囊内的气压为Y形管内监测所得气压值加适当设定值,如5cmH
附图说明
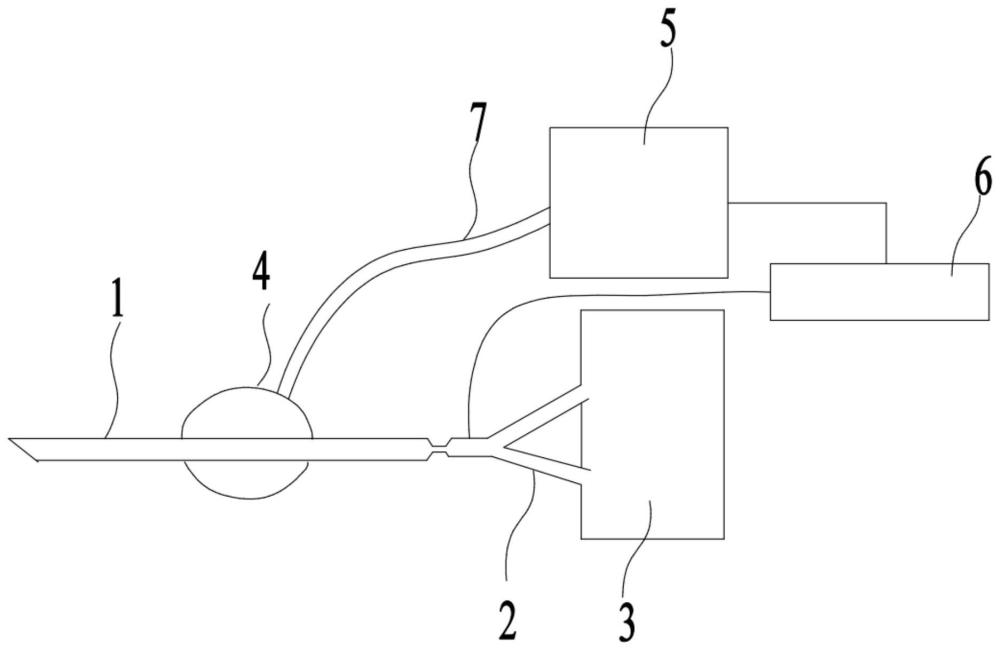
图1是本发明一种潮汐式套囊气压调节装置的结构框图。
图2是本发明气压调节器和气压控制系统的结构框图。
附图标记说明:
1-人工气道;2-Y形管道,3-呼吸机,4-套囊,5-气压调节器,51-气压调节泵,52-泵壳、521-第一空间,522-第二空间,53-活塞单元,54-驱动单元,6-气压控制系统、7-导管。
具体实施方式
下面结合附图对本发明的实施例作进一步说明。
实施例1:针对无套囊上积液的情况。
如图1-图2所示,一种潮汐式套囊气压调节装置,包括人工气道1,人工气道1为气管插管或气管切开导管,所述人工气道1的接头与呼吸机3呼吸管路连接,所述人工气道1上有套囊4,所述套囊4与气压调节器5连接,所述气压调节器5与气压控制系统6连接,所述气压控制系统6用于接收所述呼吸机3呼吸管路的气压变化信号和第一空间的第二气压传感器气压信号,并控制所述气压调节器5动作,所述气压调节器5用于调节套囊4的压力。呼吸机内的气压变化信号传递至气压控制系统。中央处理模块为PLC模块,通过PLC模块能够接收第一压力传感器提供的呼吸机呼吸管路内的气压,与第二压力传感器提供气压相比较,能够通过控制驱动单元驱动活塞单元行走的方向和距离,达到控制套囊内气压等于呼吸机呼吸管路内气压加设定值(5cmH
实施例2:针对有套囊上积液的情况
如图1-图2所示,一种潮汐式套囊气压调节装置,包括人工气道1,所述人工气道1的接头与呼吸机3呼吸管路连接,所述人工气道1上有套囊4,所述套囊4与气压调节器5连接,所述气压调节器5与气压控制系统6连接,所述气压控制系统6用于接收所述呼吸机3呼吸管路的气压变化信号和第一空间的第二气压传感器气压信号,并控制所述气压调节器5动作,所述气压调节器5用于调节套囊4的压力。呼吸机3内的气压变化信号传递至气压控制系统6。中央处理模块为PLC模块,通过PLC模块能够接收第一压力传感器提供的呼吸机呼吸管路内的气压,与第二压力传感器提供气压相比较,能够通过控制驱动单元54驱动活塞单元53行走的方向和距离,达到控制套囊4内气压等于呼吸机3呼吸管路内气压加设定值(5cmH
以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。