一种巡检机器人定位方法及系统
文献发布时间:2023-06-19 10:10:17
技术领域
本发明属于电力线路巡检技术领域,尤其涉及一种巡检机器人定位方法及系统。
背景技术
架空导线是电能输送的重要载体。导线内外部损伤可能造成断线,严重威胁输电线路的安全稳定运行以及周边公众的安全。目前,采用巡检机器人沿线路爬行,并携带可见光相机、红外检测仪、紫外检测仪甚至X射线机等设备,对输电线路进行巡检,是保障线路安全的重要手段。巡检中,确定巡检机器人在导线上的所在位置,是确定缺陷位置以及制定下一步检修策略的前提。目前,巡检机器人的定位主要采用编码器连接在驱动电机或直接和导线进行接触,通过将电机转动圈数转换为里程,获取机器人在导线上的位置信息。但由于巡检机器人驱动轮或者编码器轮很容易在导线表面打滑,造成计程误差。
发明内容
本发明的目的在于提供一种巡检机器人定位方法及方法,能够实现巡检机器人的精准定位。
为实现上述目的,本发明提供如下技术方案:
第一方面,提供了一种巡检机器人定位方法,包括:
采用和导线同直径样本获取巡检机器人视场中导线的长度;
根据所获取的视场中的导线长度获取导线相邻纹路沿导线轴向的间距;
根据导线相邻纹路沿导线轴向的间距以及巡检机器人通过的纹路个数获得巡检机器人的运动距离实现定位。
结合第一方面,进一步的,所述采用和导线同直径样本获取巡检机器人视场中导线的长度具体为:
选取和导线同样直径的长条物作为样本,且其长度要大于巡检机器人视场中的导线长度,对其做好长度尺寸标记;
选取和实际巡检中同样的巡检机器人,将其置于长条物上,并使该巡检机器人的摄像头和实际巡检中的摄像头方向保持一致;
将标记后的长条物两端超出巡检机器人的视场边界,通过巡检机器人的摄像头拍摄其图像,根据该图像得到位于视场中的长条物的实际长度L。
结合第一方面,进一步的,所述根据所获取的视场中的导线长度获取导线相邻纹路沿导线轴向的间距具体为:
通过巡检机器人的摄像头在导线上静止状态下拍摄一张图像,并将该图像转换为灰度图;
沿导线轴向读取该图像的灰度值生成灰度值变化曲线;
读取变化曲线中突变点个数n,并记录每个突变点对应的导线轴向像素位置A
根据式(2)计算导线相邻纹路沿导线轴向的间距,式(2)如下所示:
s=d×(An-A
其中,s为相邻纹路沿导线轴向的实际间距,d为每个像素点所代表的沿导线长度方向的实际尺寸。
结合第一方面,进一步的,根据导线相邻纹路沿导线轴向的间距以及巡检机器人通过的纹路个数获得巡检机器人的运动距离实现定位具体为:
在巡检机器人的视场中沿导线径向选取m个监测点,为了保证精度m的个数最好大于等于3。
将巡检机器人的视场图像转换为灰度图,在巡检机器人运动过程中实时监测个监测点的灰度值;
当某监测点灰度值出现突变的极小值时,该监测点通过的纹路个数加1,据此可得m个监测点的突变次数分别为x1、x2……xm;
根据式(3)计算巡检机器人当前相对于起始位置的距离P;
P=s×(Max[x1、x2.......xm]-1) (3)
其中,s为相邻纹路沿导线轴向的实际间距。
结合第一方面,进一步的,所述每个像素点所代表的沿导线长度方向的实际尺寸d的计算方法为:
读取巡检机器人视场图片沿导线轴向像素个数N,根据式(1)计算可得单个像素点代表的沿导线长度方向的实际尺寸,
d=L/N (1)。
第二方面,提供了一种巡检机器人定位系统,包括:
视场导线长度获取模块,用于采用和导线同直径样本获取巡检机器人视场中导线的长度;
纹路间距计算模块,用于根据所获取的视场中的导线长度获取导线相邻纹路沿导线轴向的间距;
定位模块,用于根据导线相邻纹路沿导线轴向的间距以及巡检机器人通过的纹路个数获得巡检机器人的运动距离实现定位。
有益技术效果:本发明公开了基于巡检机器人视频图像的巡检机器人定位方法,不依靠编码器,通过检测巡检机器人视频图像中某个固定点的灰度变化情况,找到灰度突变点,即导线上的纹路,进而根据导线纹路间距以机器人所通过的纹路个数,准确获得巡检机器人相对起点的位置,减少了应打滑而产生的定位误差。
附图说明
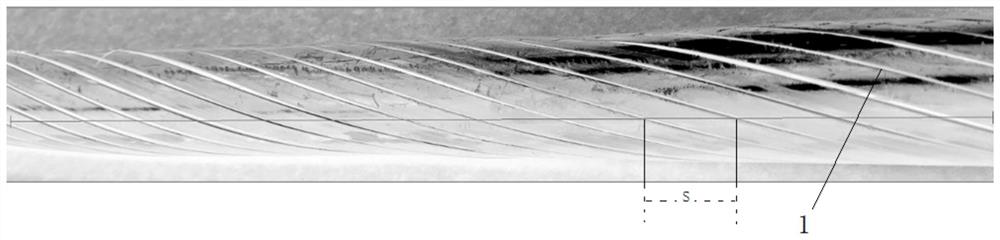
图1为本发明中导线上纹路间距的示意图;
图2为导线灰度沿轴向的变化示意图;
图3为巡检机器人在导线上运动时监测点示意图;
图4为本发明中作为样本的导线的灰度图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
如图1-4所示,提供了一种巡检机器人定位方法,包括如下步骤:
步骤一、采用和导线同直径样本获取巡检机器人视场中导线的长度,具体包括如下步骤:
S11、选取和导线同样直径的长条物(可以为导线或者棒材)作为样本,且其长度要大于巡检机器人视场中的导线长度,对其做好长度尺寸标记;
S12、选取和实际巡检中同样的巡检机器人,将其置于长条物上,并使该巡检机器人的摄像头和实际巡检中的摄像头方向保持一致;
S13、使标记后的长条物两端超出巡检机器人的视场边界,通过巡检机器人的摄像头拍摄其图像,根据该图像得到位于视场中的长条物的实际长度L。
步骤二、根据所获取的视场中的导线长度获取导线相邻纹路沿导线轴向的间距,具体包括如下步骤:
S21、巡检机器人在导线上静止状态下拍摄一张图像,并将该图像转换为灰度图;
S22、沿导线轴向读取该图像的灰度值生成灰度值变化曲线;
S23、读取变化曲线中突变点个数n,并记录每个突变点对应的导线轴向像素位置A
S24、根据式(2)计算导线相邻纹路沿导线轴向的间距,式(2)如下所示:
s=d×(An-A
读取平行于导线轴线方向每个像素的灰度变化值,如图3所示。从中可以看到灰度变化情况。灰度出现突变的点共13个,在图像上轴向的像素位置分别是142、353、572……3906,s=(3906-142)*(253/3983)/[(13-1)]=19.92mm。
其中,s为相邻纹路沿导线轴向的实际间距,d为每个像素点所代表的沿导线长度方向的实际尺寸。导线纹路1由导线表面螺旋缠绕的铝线形成,本文中纹路即两铝丝之间的间隙,因间隙出较暗,铝丝颜色较量,因此灰度变化曲线呈脉动起伏状,间隙处即为突变点。
其中,d的获取方法为:读取巡检机器人视场图片沿导线轴向像素个数N,根据式(1)计算可得单个像素点代表的沿导线长度方向的实际尺寸。
d=L/N (1)
如图4所示的导线长度为253mm,正常图像像素长度值已知为3983,视场中单个像素实物长度为253/3983。
步骤三、根据导线相邻纹路沿导线轴向的间距以及巡检机器人通过的纹路个数获得巡检机器人的运动距离实现定位,具体步骤为:
S31、在巡检机器人的视场中导线轴向的任意位置沿导线径向选取m个监测点(监测点如图3中“×”处所示),为了保证精度,m取值不小于3。
S32、将巡检机器人的视场图像转换为灰度图,在巡检机器人运动过程中实时监测个监测点的灰度值;
S33、当某监测点灰度值出现突变的极小值时,该监测点通过的纹路个数加1,据此可得m个监测点的突变次数分别为x1、x2……xm;
根据式(3)计算巡检机器人当前相对于起始位置的距离P;
P=s×(Max[x1、x2.......xm]-1) (3)
如图3所示,当巡检机器人运动时,机器人上的摄像头和导线之间发生相对运动,相当于监测点沿横线线移动至右侧竖线位置,最上方监测点共获得了10个极值点,中间监测点共获得了11个极值点,最下方监测点共获得了11个极值点,则实际运动距离约为P=[Max(10,11,11)-1]×19.92=199.2mm。无论导线多长,其误差最多为1个铝股间隙间隔,即19.92mm。
实施例2
提供了一种巡检机器人定位系统,包括:
视场导线长度获取模块,用于采用和导线同直径样本获取巡检机器人视场中导线的长度;
纹路间距计算模块,用于根据所获取的视场中的导线长度获取导线相邻纹路沿导线轴向的间距;
定位模块,用于根据导线相邻纹路沿导线轴向的间距以及巡检机器人通过的纹路个数获得巡检机器人的运动距离实现定位。
本领域内的技术人员应明白,本申请的实施例可提供为方法、系统、或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种智能巡检机器人的巡检定位方法及巡检定位系统
- 巡检机器人的定位装置、巡检机器人及巡检系统